在openmv与stm32数据传输过程中遇到了奇怪的问题。
先说明我遇到的问题,后面又源码。
若发现问题-------或者有什么想法-------还望指教!!!
我的目的:
openmv矩形识别,获取中心点坐标,通过串口发给stm32接受数据
我在main函数中,将存放的数据打印出来,然而并没有。如图

排除:
openmv通过USB->TTL,传输数据为 data = bytearray([0xb3,0xb3,cx,cy,0x0d,0x0a]) ,发现PC端接受的数据为如图:
数据是正确的。

再检查stm32与PC端的自收发,
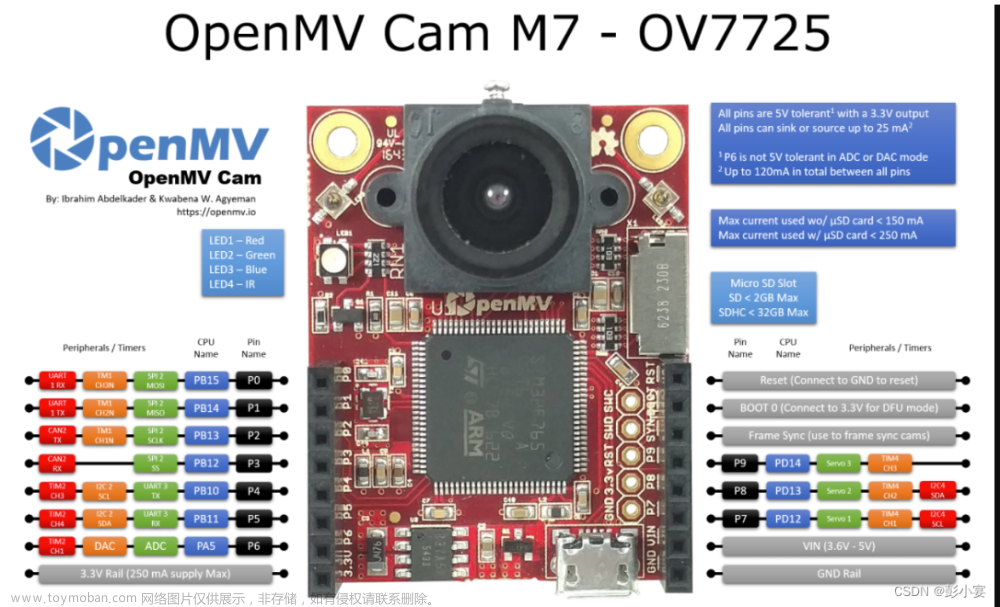
openmv和stm32单独和PC通信是正常的,现在如何stn32进入中断,接受openmv传来的数据?

下面是我的openmv代码:
import sensor, image, time, math, pyb
from pyb import UART, LED
import json
import ustruct
LED_R = pyb.LED(1)
LED_G = pyb.LED(2)
LED_B = pyb.LED(3)
LED_R.on()
LED_G.on()
LED_B.on()
red_threshold_01 = ((100, 12, -98, 127, -128, 127));
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
clock = time.clock()
clock.tick()
LED_G.off()
uart = UART(4,115200) #设置串口波特率,与stm32一致
uart.init(115200, bits=8, parity=None, stop=1 )
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob = blob
max_size = blob.pixels()
return max_blob
def sending_data(cx,cy):
global uart;
data = bytearray([0xb3,0xb3,cx,cy,0x0d,0x0a])
uart.write(data); #传入字节数组
while(True):
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold_01]);
cx=0;cy=0;
if blobs:
# 如果找到了目标元素
max_b = find_max(blobs);
#
img.draw_rectangle(max_b[0:4])
# 用矩形标记处颜色区域
img.draw_cross(max_b[5], max_b[6])
# 在中心画标记
# 在目标颜色区域的中心画十字形标记
cx=max_b[5];
cy=max_b[6];
sending_data(cx,cy);
print("x=%d y=%d"%(cx,cy));
#time.sleep(500)
下面是stm32中的代码:
usart.c的:
#include "sys.h"
#include "usart.h"
#include "key.h"
#include "led.h"
#include "openmv.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 使用
#endif
//
//串口1初始化
//STM32F4工程-库函数版本
//淘宝店铺:http://mcudev.taobao.com
//********************************************************************************
//
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
//u8 RxBuffer1[14];
//u8 RxCounter1 = 0;
//u8 RxFlag1 = 0;
//static uint8_t rebuf[8]={0};
//初始化IO 串口1
//bound:波特率
void uart_init(uint32_t bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//UART_TX IO配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 ; //GPIOA9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
// GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9
//UART_RX IO配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 ; //GPIOA10
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输入功能
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA10
//USART1 初始化设置
USART_DeInit(USART1);
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ClearFlag(USART1,USART_FLAG_TXE);//清除发送标志位
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//中断使能
USART_Cmd(USART1, ENABLE); //使能串口1
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;//抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
void USART1_IRQHandler(void)//串口1中断服务程序
{
u8 com_data;
//USART_IT_RXNE 替换为? USART_FLAG_ORE
if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
//与PC测试用
// USART_ClearFlag(USART1,USART_FLAG_RXNE);
// USART_SendData(USART1,USART_ReceiveData(USART1));
printf("point");
USART_ClearFlag(USART1,USART_FLAG_RXNE);
com_data = USART_ReceiveData(USART1);
Openmv_Receive_Data(com_data); //openmv数据处理函数
Openmv_Data(); //openmv数据显示函数
com_data=0;
// USART_ClearITPendingBit(USART1,USART_IT_RXNE);
// while(USART_GetITStatus(USART1,USART_FLAG_TC) == RESET);
}
}
#endif
//openmv的接受函数
openmv.c代码:
#include "openmv.h"
#include "led.h"
#include "stm32f4xx.h"
int openmv[7]; //stm32接收数据数组
int16_t OpenMV_X; //cx
int16_t OpenMV_Y; //cy
int8_t Distance; //距离
//距离是没有接受的
int i = 0;
void Openmv_Receive_Data(int16_t data)
{
static u8 state = 0;
if(state == 0 && data == 0xb3)
{
state = 1;
openmv[0] = data;
}
else if(state == 1 && data == 0xb3)
{
state = 2;
openmv[1] = data;
}
else if(state == 2)
{
state = 3;
openmv[2] = data;
}
else if(state == 3)
{
state = 4;
openmv[3] = data;
}
else if(state == 4)
{
state = 5;
openmv[4] = data;
}
else if(state == 5)
{
state = 6;
openmv[5] = data;
}
else if(state == 6) // 检测是否接收到结束标志
{
if(data == 0x0a)
{
state = 0;
LED1 =~ LED1;
openmv[6] = data;
Openmv_Data();
data = 0;
}
else if(data != 0x0a)
{
state = 0;
for(i = 0;i < 7;i++)
{
openmv[i] = 0x00;
}
}
}
else
{
state = 0;
data = 0;
LED1 = 0;
for(i = 0;i < 7;i++)
{
openmv[i] = 0x00;
}
}
}
void Openmv_Data(void)
{
OpenMV_X = openmv[2];
OpenMV_Y = openmv[3];
Distance = openmv[4];
//这里distance应该是\r
}
这是整个工程的文件包
链接:https://pan.baidu.com/s/1ZMj_XRitgZsoTnB7Q9s9iw
提取码:5k6t
请指教!!!请指教!!!请指教!!!请指教!!!请指教!!!文章来源:https://www.toymoban.com/news/detail-613772.html
如果提供技术支持的话,可以考虑有偿文章来源地址https://www.toymoban.com/news/detail-613772.html
到了这里,关于openmv与stm32串口通信数据传输的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!