目录
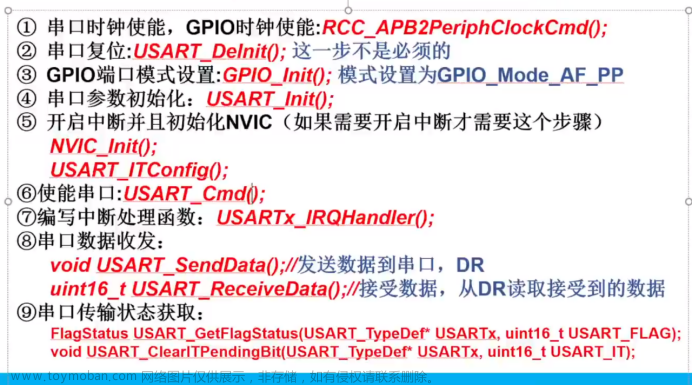
一、定时器
计数和定时器中断
输出比较(PWM)
二、 舵机
三、超声波测距
四、主函数
总结
推荐的STM32学习链接:
[6-1] TIM定时中断_哔哩哔哩_bilibili[6-1] TIM定时中断是STM32入门教程-2022持续更新中的第13集视频,该合集共计29集,视频收藏或关注UP主,及时了解更多相关视频内容。https://www.bilibili.com/video/BV1th411z7sn?p=13&vd_source=ed36b2700bbc2bac7746c270bc391540延时函数和OLED函数代码:
STM32F103C8T6延时函数和OLED显示屏代码_HX091624的博客-CSDN博客文章来源:https://www.toymoban.com/news/detail-614537.html
使用舵机带动超声波转动不同角度,完成左右前三个方向的距离测量、判断后完成避障文章来源地址https://www.toymoban.com/news/detail-614537.html
一、定时器
到了这里,关于STM32F103C8T6智能小车舵机超声波避障的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!