1.互补PWM输出简介
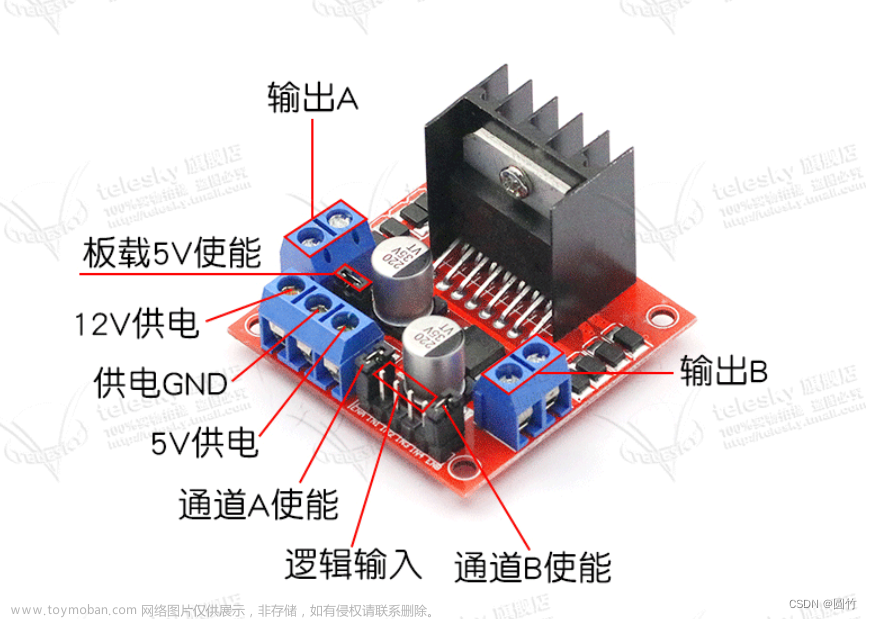
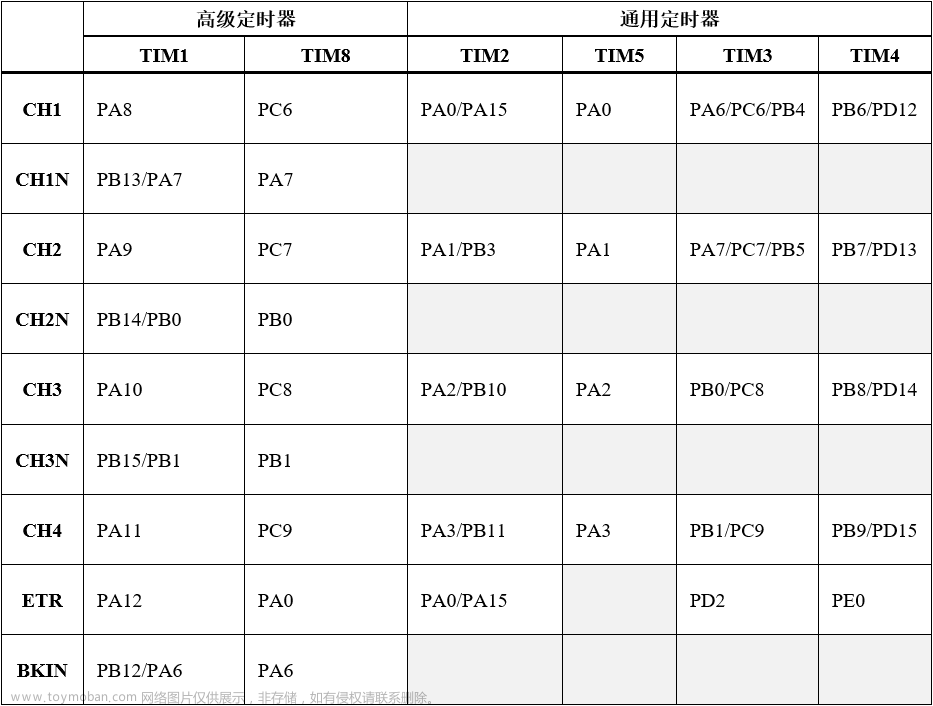
- 在使用stm32输出PWM波形时,笔者所用的stm32f103zet6中的高级定时器TIM1和TIM8可以输出互补的PWM波形,使用互补的PWM波常见与一些半桥电路和全桥电路控制中,使用MCU自带的高级时钟可以简便的解决互补PWM输出问题。
笔者在控制半桥电路中应用了MCU自带的TIM1时钟CH_1和CH_1N的输出带死区时间的互补PWM波形,输出稳定。
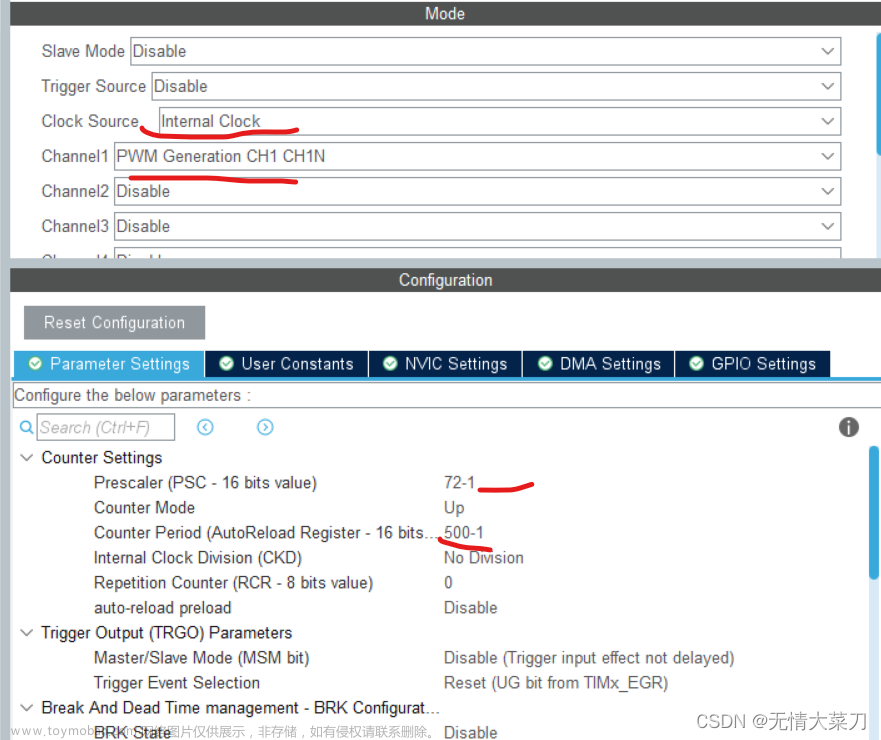
2.互补PWM波输出设置
/**
* @brief 互补的PWM输出初始化.
* @param arr:计数总数;
psc:预分频;
ccr1_val:计数ccr1后翻转电平;
deadtime:死区时间.
* @retval None.
* @msg PWM输出频率为72MHz/(arr+1)*(psc+1)此处设置PWM频率为100KHz;
死区时间设置为16*1/72us=222.2ns(0x10).
*/
void TIM1_PWM1_DeadtimeInit(u16 arr,u16 psc,u16 CCRx_val,u16 deadtime)
{
GPIO_InitTypeDef GPIO_InitSturcture;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitSturcture.GPIO_Pin = GPIO_Pin_8 ;
GPIO_InitSturcture.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitSturcture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitSturcture);
GPIO_InitSturcture.GPIO_Pin = GPIO_Pin_13 ;
GPIO_InitSturcture.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitSturcture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitSturcture);
TIM_TimeBaseInitStructure.TIM_Period = arr; /*设置在自动重装载周期值*/
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; /*设置预分频值*/
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; /*向上计数模式*/
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; /*死区、输入滤波、输入采样不分频*/
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00; /*重复计数器设置为0*/
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; /*PWM1输出方式*/
TIM_OCInitStructure.TIM_Pulse = CCRx_val; /*计数到CCRx_val电平反转,即设置CCRx的值*/
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; /*输出通道电平极性配置,决定输出的有效电平*/
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; /*互补输出通道电平极性配置,决定输出的有效电平*/
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; /*输出使能*/
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; /*互补输出使能*/
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; /*输出通道空闲电平极性配置(刹车后为空闲状态)*/
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Set; /*互补输出通道空闲电平极性配置*/
TIM_OC1Init(TIM1, &TIM_OCInitStructure); /*根据TIM指定的参数初始化外设TIM1 OC1*/
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); /*使能TIM1在CCR1上的预装载寄存器*/
/*刹车和死区设置*/
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; /*OSSR:运行模式下“关闭状态”选择*/
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; /*OSSI:空闲模式下“关闭状态”选择*/
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; /*锁定设置,级别为1*/
TIM_BDTRInitStructure.TIM_DeadTime = deadtime; /*死区延时时间*/
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; /*禁止刹车输入*/
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_Low; /*刹车输入极性*/
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; /*自动输出使能*/
TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);
TIM_ARRPreloadConfig(TIM1,ENABLE); /*设置ARR值(周期值)在当前周期即改变*/
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE); /*主输出使能,高级定时器专用*/
TIM_DMACmd(TIM1, TIM_DMA_Update, ENABLE); /*TIM1 DMA请求使能,注:TIM1_Update请求对应DMA通道为DMA1_chanel5*/
}
- 此处是笔者所初始化的一段互补PWM波形输出,通过此段初始化代码可以简单的看到互补PWM输出只需要通过相应的设计即可完成,不需要额外配置其他硬件电路,将两个3.3v的互补PWM接到相应的硬件电路与即可完成。
- 关于死区时间计算可以仔细研读一下stm32的手册
 文章来源地址https://www.toymoban.com/news/detail-615232.html
文章来源地址https://www.toymoban.com/news/detail-615232.html
文章来源:https://www.toymoban.com/news/detail-615232.html
到了这里,关于stm32关于带死区时间的互补PWM输出的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!