文章来源:https://www.toymoban.com/news/detail-615660.html
文章来源:https://www.toymoban.com/news/detail-615660.html
/***********************头文件*************************/
#include <REGX52.H>
#include <intrins.h>
/***********************单片机初始化引脚****************/
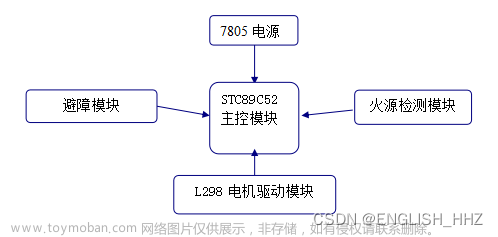
sbit IN1 = P1^4;
sbit IN2 = P1^3;
sbit IN3 = P1^2;
sbit IN4 = P1^1;
sbit ENA = P1^5; //调速引脚
sbit ENB = P1^0; //调速引脚
sbit Lsen = P2^7;
sbit Rsen = P2^4;
/****************初始化变量(标志位)***********************/
unsigned int compareA = 80,compareB = 80; //小车左轮的速度compareA与右轮的速度compareB(0~100)
unsigned int counter = 0; //卡定时次数的标志位
unsigned int a = 0; //卡循迹同时扫到黑线的标志位
/***********************要用到的自定义函数******************/
void Delay(unsigned int xms) //@11.0592MHz,延时函数(多少毫秒)
{
while(xms)
{
unsigned char i, j;
_nop_();
i = 2;
j = 199;
do
{
while (--j);
} while (--i);
xms--;
}
}
void go_ahead()
{
compareA = 80;
compareB = 80;
IN1 = 0;
IN2 = 1;
IN3 = 1;
IN4 = 0;
}
/**********速度慢的执行函数****************/
//void go_ahead_1()
//{
// compareA = 10;
// compareB = 10;
// IN1 = 0;
// IN2 = 1;
// IN3 = 1;
// IN4 = 0;
//}
/************等到最后停不住启动***********/
void turn_left() //左转函数
{
compareA = 80;
compareB = 80;
IN1 = 0;
IN2 = 1;
IN3 = 0;
IN4 = 1;
}
void turn_right() //右转函数
{
compareA = 80;
compareB = 80;
IN1 = 1;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void stop() //停止函数
{
ENA = 0;
ENB = 0;
}
void xunji() //循迹函数
{
if(Lsen == 1 && Rsen == 0) //这里是循迹扫到黑为1,白为0;也有可能相反,自己去试
{
turn_left(); //普通与直角弯
}
else if(Lsen == 0 && Rsen == 1)
{
turn_right(); //普通与直角弯
}
else if( a == 0 && Lsen == 1 && Rsen == 1)
{
turn_left(); //“T”字形,右拐也行
a++;
}
else if( a == 1 && Lsen == 1 && Rsen == 1)
{
go_ahead(); //也可重新定义一个速度慢的执行函数go_ahead_1()
a++;
}
else if(a == 2 && Lsen == 1 && Rsen == 1)
{
stop();
Delay(200);//调用延时函数
turn_right();
Delay(500);//调用延时函数,自己调节最后的转角,可能不是500,不触及边线即可
stop();
Delay(1000);//保证小车停稳
}
else
{
go_ahead();//除了以上特殊情况,直行即可
}
}
/**************************************用于小车调速的定时器*********************************/
void Timer0_Init(void) //每100微秒进一次中断
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
EA = 1;
ET0 = 1;
PT0 = 0;
}
void Timer0_Routine() interrupt 1 //中断服务函数
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
counter++;
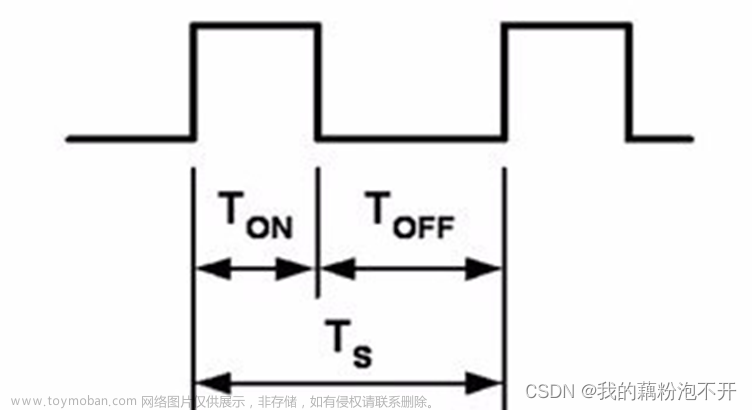
if(counter == 100) //100次为一个周期,即100*100=10000us=10ms为一个PWM周期
{
counter = 0;
}
if(counter > compareA)
{
ENA = 0;
}
else if(counter <= compareA)
{
ENA = 1;
}
else if(counter > compareB)
{
ENB = 0;
}
else if(counter <= compareB)
{
ENB = 1;
}
}
/****************主函数(程序开始的地方)***********************/
void main()
{
Timer0_Init();//初始化定时器0
while(1)
{
xunji();
}
}
文章来源地址https://www.toymoban.com/news/detail-615660.html
到了这里,关于51单片机——循迹小车源码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!