北斗模块设备
北斗模块用的MTK RS1612M3 , http://www.sragps.com/web/down.html,可以查看相关资料,用串口和系统通讯 Android12中主要包括串口设备树修改,GPS2.0加载,gps.default.so编译和上层应用测试,以下主要记录测试中碰到的难点
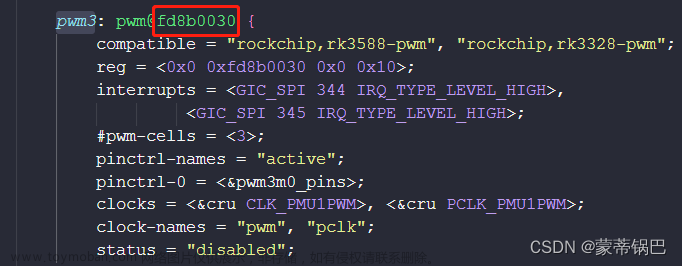
设备树添加串口
板子上用的串口8,因此打开uart8的设备树配置
&uart8 {
status = “okay”;
pinctrl-names = “default”;
pinctrl-0 = <&uart8m0_xfer &uart8m0_ctsn &uart8m0_rtsn>;
};
用默认的RK3588-evb1-lp4-v10.dts
替换gnss2.0补丁
从瑞芯微获得gnss2.0 补丁,替换以前的内容,在hardware\interfaces\gnss\2.0\default\
修改device.mk 添加
PRODUCT_PACKAGES +=
android.hardware.gnss@2.0-impl
android.hardware.gnss@2.0-service
从北斗模块厂家或自已开发gps.default.so。
我们使用瑞芯微获取 gps_zkw.c,和Android.mk. 编译后生成gps.default.so
可以单独生成gps.default.so 会放到/vendor/lib64/hw 目录下。
设置/dev/ttyS8 权限
以上修改后打包生成镜像文件,一直提示没有权限打不开/dev/ttyS8,在网上搜索发现是没有添加权限。在linux系统中,可通过udev规则在系统启动时修改设备文件的访问权限,但在Android系统中没有实现udev规则,而是提供uevent机制,可以在系统启动时修改设备文件的访问权限。我们查看ueventd.rc的信息:
system/core/rootdir/ueventd.rc 中添加
/dev/ttyS8 0666 root root
按说添加以后应该会生效,但一直还是提示没有权限,后发现是其他地方修改了。
在/device/rockchip/common/init.connectivity.rc,文件中,把ttyS8当做蓝牙了
chown bluetooth net_bt /dev/ttyS8
把这部分去掉,就可以看到数据通过callback发到上层了。
应用层测试
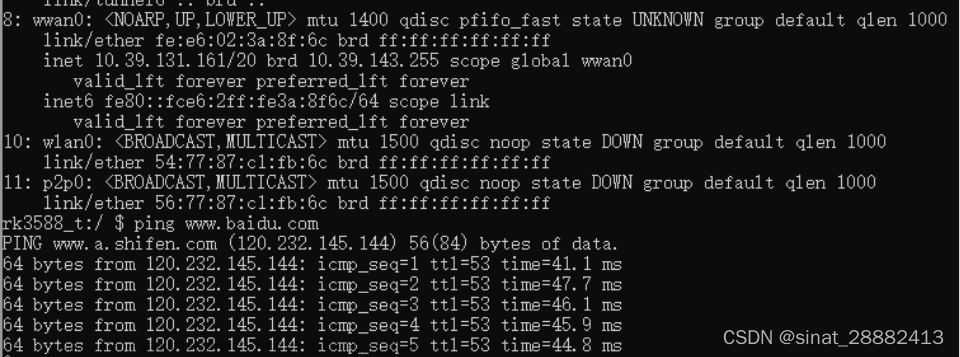
在网上搜索了几个测试软件,有AndroiTS GPS Test和Cellular-Z,其中Cellular-Z可以查看NMEA
可以看到实时收到的实时数据
软件提示要到室外开阔的地方测试,也就是需要天线了。
由于还没有安装天线,卫星数还显示不出来。
gps.zkw.c参考文章来源:https://www.toymoban.com/news/detail-615941.html
#include <pthread.h>
#include <fcntl.h>
#include <sys/epoll.h>
#include <math.h>
#include <time.h>
#include <string.h>
#include <sys/socket.h>
#include <sys/un.h>
#include <arpa/inet.h>
#include <netinet/in.h>
#include <netdb.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <semaphore.h>
#include <termios.h>
#include <sys/ioctl.h>
#include <sys/time.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#define LOCATION_NLP_FIX "/data/misc/gps/LOCATION.DAT"
#define C_INVALID_FD -1
#define LOG_TAG "gps_zkw"
#include <cutils/log.h>
#include <cutils/sockets.h>
#include <cutils/properties.h>
#ifdef HAVE_LIBC_SYSTEM_PROPERTIES
#define _REALLY_INCLUDE_SYS__SYSTEM_PROPERTIES_H_
#include <sys/_system_properties.h>
#endif
//#include <hardware/gps7.h>
#include <hardware/gps.h>
/* the name of the controlled socket */
#define GPS_CHANNEL_NAME "/dev/ttyS3"
#define TTY_BAUD B9600 // B115200
#define GPS_DEBUG 1
#define NEMA_DEBUG 1 /*the flag works if GPS_DEBUG is defined*/
#if GPS_DEBUG
#define TRC(f) ALOGE("%s", __func__)
#define ERR(f, ...) ALOGE("%s: line = %d, " f, __func__, __LINE__, ##__VA_ARGS__)
#define WAN(f, ...) ALOGE("%s: line = %d, " f, __func__, __LINE__, ##__VA_ARGS__)
#define DBG(f, ...) ALOGE("%s: line = %d, " f, __func__, __LINE__, ##__VA_ARGS__)
#define VER(f, ...) ((void)0) // ((void)0) //
#else
# define DBG(...) ((void)0)
# define VER(...) ((void)0)
# define ERR(...) ((void)0)
#endif
static int flag_unlock = 0;
GpsStatus gps_status;
const char* gps_native_thread = "GPS NATIVE THREAD";
static GpsCallbacks callback_backup;
static float report_time_interval = 0;
static int started = 0;
/*****************************************************************************/
/*****************************************************************/
/*****************************************************************/
/***** *****/
/***** C O N N E C T I O N S T A T E *****/
/***** *****/
/*****************************************************************/
/*****************************************************************/
/* commands sent to the gps thread */
enum {
CMD_QUIT = 0,
CMD_START = 1,
CMD_STOP = 2,
CMD_RESTART = 3,
CMD_DOWNLOAD = 4,
CMD_TEST_START = 10,
CMD_TEST_STOP = 11,
CMD_TEST_SMS_NO_RESULT = 12,
};
static int gps_nmea_end_tag = 0;
/*****************************************************************/
/*****************************************************************/
/***** *****/
/***** N M E A T O K E N I Z E R *****/
/***** *****/
/*****************************************************************/
/*****************************************************************/
typedef struct {
const char* p;
const char* end;
} Token;
#define MAX_NMEA_TOKENS 24
typedef struct {
int count;
Token tokens[ MAX_NMEA_TOKENS ];
} NmeaTokenizer;
static int
nmea_tokenizer_init(NmeaTokenizer* t, const char* p, const char* end)
{
int count = 0;
char* q;
// the initial '$' is optional
if (p < end && p[0] == '$')
p += 1;
// remove trailing newline
if (end > p && (*(end-1) == '\n')) {
end -= 1;
if (end > p && (*(end-1) == '\r'))
end -= 1;
}
// get rid of checksum at the end of the sentecne
if (end >= p+3 && (*(end-3) == '*')) {
end -= 3;
}
while (p < end) {
const char* q = p;
q = memchr(p, ',', end-p);
if (q == NULL)
q = end;
if (q >= p) {
if (count < MAX_NMEA_TOKENS) {
t->tokens[count].p = p;
t->tokens[count].end = q;
count += 1;
}
}
if (q < end)
q += 1;
p = q;
}
t->count = count;
return count;
}
static Token
nmea_tokenizer_get(NmeaTokenizer* t, int index)
{
Token tok;
static const char* dummy = "";
if (index < 0 || index >= t->count) {
tok.p = tok.end = dummy;
} else
tok = t->tokens[index];
return tok;
}
static int
str2int(const char* p, const char* end)
{
int result = 0;
int len = end - p;
int sign = 1;
if (*p == '-')
{
sign = -1;
p++;
len = end - p;
}
for (; len > 0; len--, p++)
{
int c;
if (p >= end)
goto Fail;
c = *p - '0';
if ((unsigned)c >= 10)
goto Fail;
result = result*10 + c;
}
return sign*result;
Fail:
return -1;
}
static double
str2float(const char* p, const char* end)
{
int result = 0;
int len = end - p;
char temp[16];
if (len >= (int)sizeof(temp))
return 0.;
memcpy(temp, p, len);
temp[len] = 0;
return strtod(temp, NULL);
}
/*****************************************************************/
/*****************************************************************/
/***** *****/
/***** N M E A P A R S E R *****/
/***** *****/
/*****************************************************************/
/*****************************************************************/
// #define NMEA_MAX_SIZE 83
#define NMEA_MAX_SIZE 128
/*maximum number of SV information in GPGSV*/
#define NMEA_MAX_SV_INFO 4
#define LOC_FIXED(pNmeaReader) ((pNmeaReader->fix_mode == 2) || (pNmeaReader->fix_mode ==3))
typedef struct {
int pos;
int overflow;
int utc_year;
int utc_mon;
int utc_day;
int utc_diff;
GpsLocation fix;
/*
* The fix flag extracted from GPGSA setence: 1: No fix; 2 = 2D; 3 = 3D
* if the fix mode is 0, no location will be reported via callback
* otherwise, the location will be reported via callback
*/
int fix_mode;
/*
* Indicate that the status of callback handling.
* The flag is used to report GPS_STATUS_SESSION_BEGIN or GPS_STATUS_SESSION_END:
* (0) The flag will be set as true when callback setting is changed via nmea_reader_set_callback
* (1) GPS_STATUS_SESSION_BEGIN: receive location fix + flag set + callback is set
* (2) GPS_STATUS_SESSION_END: receive location fix + flag set + callback is null
*/
int cb_status_changed;
int sv_count; /*used to count the number of received SV information*/
GpsSvStatus sv_status_gps;
GnssSvStatus sv_status_gnss;
GpsCallbacks callbacks;
char in[ NMEA_MAX_SIZE+1 ];
int sv_status_can_report;
int location_can_report;
int sv_used_in_fix[256];
} NmeaReader;
static void
nmea_reader_update_utc_diff(NmeaReader* const r)
{
time_t now = time(NULL);
struct tm tm_local;
struct tm tm_utc;
unsigned long time_local, time_utc;
gmtime_r(&now, &tm_utc);
localtime_r(&now, &tm_local);
time_local = mktime(&tm_local);
time_utc = mktime(&tm_utc);
r->utc_diff = time_utc - time_local;
}
static void
nmea_reader_init(NmeaReader* const r)
{
memset(r, 0, sizeof(*r));
r->pos = 0;
r->overflow = 0;
r->utc_year = -1;
r->utc_mon = -1;
r->utc_day = -1;
r->utc_diff = 0;
r->callbacks.location_cb= NULL;
r->callbacks.status_cb= NULL;
r->callbacks.sv_status_cb= NULL;
r->sv_count = 0;
r->fix_mode = 0; /*no fix*/
r->cb_status_changed = 0;
memset((void*)&r->sv_status_gps, 0x00, sizeof(r->sv_status_gps));
memset((void*)&r->sv_status_gnss, 0x00, sizeof(r->sv_status_gnss));
memset((void*)&r->in, 0x00, sizeof(r->in));
nmea_reader_update_utc_diff(r);
}
static void
nmea_reader_set_callback(NmeaReader* const r, GpsCallbacks* const cbs)
{
if (!r) { /*this should not happen*/
return;
} else if (!cbs) { /*unregister the callback */
return;
} else {/*register the callback*/
r->fix.flags = 0;
r->sv_count = 0;
r->sv_status_gps.num_svs = 0;
r->sv_status_gnss.num_svs = 0;
}
}
static int
nmea_reader_update_time(NmeaReader* const r, Token tok)
{
int hour, minute;
double seconds;
struct tm tm;
struct tm tm_local;
time_t fix_time;
if (tok.p + 6 > tok.end)
return -1;
memset((void*)&tm, 0x00, sizeof(tm));
if (r->utc_year < 0) {
// no date yet, get current one
time_t now = time(NULL);
gmtime_r(&now, &tm);
r->utc_year = tm.tm_year + 1900;
r->utc_mon = tm.tm_mon + 1;
r->utc_day = tm.tm_mday;
}
hour = str2int(tok.p, tok.p+2);
minute = str2int(tok.p+2, tok.p+4);
seconds = str2float(tok.p+4, tok.end);
tm.tm_hour = hour;
tm.tm_min = minute;
tm.tm_sec = (int) seconds;
tm.tm_year = r->utc_year - 1900;
tm.tm_mon = r->utc_mon - 1;
tm.tm_mday = r->utc_day;
tm.tm_isdst = -1;
if (mktime(&tm) == (time_t)-1)
ERR("mktime error: %d %s\n", errno, strerror(errno));
fix_time = mktime(&tm);
localtime_r(&fix_time, &tm_local);
// fix_time += tm_local.tm_gmtoff;
// DBG("fix_time: %d\n", (int)fix_time);
r->fix.timestamp = (long long)fix_time * 1000;
return 0;
}
static int
nmea_reader_update_date(NmeaReader* const r, Token date, Token time)
{
Token tok = date;
int day, mon, year;
if (tok.p + 6 != tok.end) {
ERR("date not properly formatted: '%.*s'", tok.end-tok.p, tok.p);
return -1;
}
day = str2int(tok.p, tok.p+2);
mon = str2int(tok.p+2, tok.p+4);
year = str2int(tok.p+4, tok.p+6) + 2000;
if ((day|mon|year) < 0) {
ERR("date not properly formatted: '%.*s'", tok.end-tok.p, tok.p);
return -1;
}
r->utc_year = year;
r->utc_mon = mon;
r->utc_day = day;
return nmea_reader_update_time(r, time);
}
static double
convert_from_hhmm(Token tok)
{
double val = str2float(tok.p, tok.end);
int degrees = (int)(floor(val) / 100);
double minutes = val - degrees*100.;
double dcoord = degrees + minutes / 60.0;
return dcoord;
}
static int
nmea_reader_update_latlong(NmeaReader* const r,
Token latitude,
char latitudeHemi,
Token longitude,
char longitudeHemi)
{
double lat, lon;
Token tok;
tok = latitude;
if (tok.p + 6 > tok.end) {
ERR("latitude is too short: '%.*s'", tok.end-tok.p, tok.p);
return -1;
}
lat = convert_from_hhmm(tok);
if (latitudeHemi == 'S')
lat = -lat;
tok = longitude;
if (tok.p + 6 > tok.end) {
ERR("longitude is too short: '%.*s'", tok.end-tok.p, tok.p);
return -1;
}
lon = convert_from_hhmm(tok);
if (longitudeHemi == 'W')
lon = -lon;
r->fix.flags |= GPS_LOCATION_HAS_LAT_LONG;
r->fix.latitude = lat;
r->fix.longitude = lon;
return 0;
}
/* this is the state of our connection to the daemon */
typedef struct {
int init;
int fd;
GpsCallbacks callbacks;
pthread_t thread;
int control[2];
int sockfd;
int epoll_hd;
int flag;
int start_flag;
// int thread_exit_flag;
} GpsState;
static GpsState _gps_state[1];
static int
nmea_reader_update_altitude(NmeaReader* const r,
Token altitude,
Token units)
{
double alt;
Token tok = altitude;
if (tok.p >= tok.end)
return -1;
r->fix.flags |= GPS_LOCATION_HAS_ALTITUDE;
r->fix.altitude = str2float(tok.p, tok.end);
return 0;
}
static int
nmea_reader_update_bearing(NmeaReader* const r,
Token bearing)
{
double alt;
Token tok = bearing;
if (tok.p >= tok.end)
return -1;
r->fix.flags |= GPS_LOCATION_HAS_BEARING;
r->fix.bearing = str2float(tok.p, tok.end);
return 0;
}
static int
nmea_reader_update_speed(NmeaReader* const r,
Token speed)
{
double alt;
Token tok = speed;
if (tok.p >= tok.end)
return -1;
r->fix.flags |= GPS_LOCATION_HAS_SPEED;
// knot to m/s
r->fix.speed = str2float(tok.p, tok.end) / 1.942795467;
return 0;
}
// Add by LCH for accuracy
static int
nmea_reader_update_accuracy(NmeaReader* const r,
Token accuracy)
{
double alt;
Token tok = accuracy;
if (tok.p >= tok.end)
return -1;
r->fix.flags |= GPS_LOCATION_HAS_ACCURACY;
r->fix.accuracy = str2float(tok.p, tok.end);
return 0;
}
/*
static int
nmea_reader_update_sv_status_gps(NmeaReader* r, int sv_index,
int id, Token elevation,
Token azimuth, Token snr)
{
// int prn = str2int(id.p, id.end);
int prn = id;
if ((prn <= 0) || (prn < 65 && prn > GPS_MAX_SVS)|| (prn > 96) || (r->sv_count >= GPS_MAX_SVS)) {
VER("sv_status_gps: ignore (%d)", prn);
return 0;
}
sv_index = r->sv_count+r->sv_status_gps.num_svs;
if (GPS_MAX_SVS <= sv_index) {
ERR("ERR: sv_index=[%d] is larger than GPS_MAX_SVS.\n", sv_index);
return 0;
}
r->sv_status_gps.sv_list[sv_index].prn = prn;
r->sv_status_gps.sv_list[sv_index].snr = str2float(snr.p, snr.end);
r->sv_status_gps.sv_list[sv_index].elevation = str2int(elevation.p, elevation.end);
r->sv_status_gps.sv_list[sv_index].azimuth = str2int(azimuth.p, azimuth.end);
r->sv_count++;
VER("sv_status_gps(%2d): %2d, %2f, %3f, %2f", sv_index,
r->sv_status_gps.sv_list[sv_index].prn, r->sv_status_gps.sv_list[sv_index].elevation,
r->sv_status_gps.sv_list[sv_index].azimuth, r->sv_status_gps.sv_list[sv_index].snr);
return 0;
}
*/
static int
get_svid(int prn, int sv_type)
{
if (sv_type == GNSS_CONSTELLATION_GLONASS && prn >= 1 && prn <= 32)
return prn + 64;
else if (sv_type == GNSS_CONSTELLATION_BEIDOU && prn >= 1 && prn <= 32)
return prn + 200;
return prn;
}
static int
nmea_reader_update_sv_status_gnss(NmeaReader* r, int sv_index,
int id, Token elevation,
Token azimuth, Token snr)
{
int prn = id;
sv_index = r->sv_count + r->sv_status_gnss.num_svs;
if (GNSS_MAX_SVS <= sv_index) {
ERR("ERR: sv_index=[%d] is larger than GNSS_MAX_SVS.\n", sv_index);
return 0;
}
if ((prn > 0) && (prn < 32)) {
r->sv_status_gnss.gnss_sv_list[sv_index].svid = prn;
r->sv_status_gnss.gnss_sv_list[sv_index].constellation = GNSS_CONSTELLATION_GPS;
} else if ((prn >= 65) && (prn <= 96)) {
r->sv_status_gnss.gnss_sv_list[sv_index].svid = prn-64;
r->sv_status_gnss.gnss_sv_list[sv_index].constellation = GNSS_CONSTELLATION_GLONASS;
} else if ((prn >= 201) && (prn <= 237)) {
r->sv_status_gnss.gnss_sv_list[sv_index].svid = prn-200;
r->sv_status_gnss.gnss_sv_list[sv_index].constellation = GNSS_CONSTELLATION_BEIDOU;
} else if ((prn >= 401) && (prn <= 436)) {
r->sv_status_gnss.gnss_sv_list[sv_index].svid = prn-400;
r->sv_status_gnss.gnss_sv_list[sv_index].constellation = GNSS_CONSTELLATION_GALILEO;
} else {
DBG("sv_status: ignore (%d)", prn);
return 0;
}
r->sv_status_gnss.gnss_sv_list[sv_index].c_n0_dbhz = str2float(snr.p, snr.end);
r->sv_status_gnss.gnss_sv_list[sv_index].elevation = str2int(elevation.p, elevation.end);
r->sv_status_gnss.gnss_sv_list[sv_index].azimuth = str2int(azimuth.p, azimuth.end);
r->sv_status_gnss.gnss_sv_list[sv_index].flags = 0;
if (1 == r->sv_used_in_fix[prn]) {
r->sv_status_gnss.gnss_sv_list[sv_index].flags |= GNSS_SV_FLAGS_USED_IN_FIX;
}
r->sv_count++;
DBG("sv_status(%2d): %2d, %d, %2f, %3f, %2f, %d",
sv_index, r->sv_status_gnss.gnss_sv_list[sv_index].svid, r->sv_status_gnss.gnss_sv_list[sv_index].constellation,
r->sv_status_gnss.gnss_sv_list[sv_index].elevation, r->sv_status_gnss.gnss_sv_list[sv_index].azimuth,
r->sv_status_gnss.gnss_sv_list[sv_index].c_n0_dbhz, r->sv_status_gnss.gnss_sv_list[sv_index].flags);
return 0;
}
static void
nmea_reader_parse(NmeaReader* const r)
{
/* we received a complete sentence, now parse it to generate
* a new GPS fix...
*/
NmeaTokenizer tzer[1];
Token tok;
GnssConstellationType sv_type = GNSS_CONSTELLATION_GPS;
#if NEMA_DEBUG
DBG("Received: '%.*s'", r->pos, r->in);
#endif
if (r->pos < 9) {
ERR("Too short. discarded. '%.*s'", r->pos, r->in);
return;
}
if (r->pos < (int)sizeof(r->in)) {
nmea_tokenizer_init(tzer, r->in, r->in + r->pos);
}
#if NEMA_DEBUG
{
int n;
DBG("Found %d tokens", tzer->count);
for (n = 0; n < tzer->count; n++) {
Token tok = nmea_tokenizer_get(tzer, n);
DBG("%2d: '%.*s'", n, tok.end-tok.p, tok.p);
}
}
#endif
tok = nmea_tokenizer_get(tzer, 0);
if (tok.p + 5 > tok.end) {
ERR("sentence id '%.*s' too short, ignored.", tok.end-tok.p, tok.p);
return;
}
// ignore first two characters.
if (!memcmp(tok.p, "BD", 2)) {
sv_type = GNSS_CONSTELLATION_BEIDOU;
DBG("BDS SV type");
}
else if (!memcmp(tok.p, "GL", 2)) {
sv_type = GNSS_CONSTELLATION_GLONASS;
DBG("GLN SV type");
}
tok.p += 2;
if (!memcmp(tok.p, "GGA", 3)) {
// GPS fix
Token tok_time = nmea_tokenizer_get(tzer, 1);
Token tok_latitude = nmea_tokenizer_get(tzer, 2);
Token tok_latitudeHemi = nmea_tokenizer_get(tzer, 3);
Token tok_longitude = nmea_tokenizer_get(tzer, 4);
Token tok_longitudeHemi = nmea_tokenizer_get(tzer, 5);
Token tok_altitude = nmea_tokenizer_get(tzer, 9);
Token tok_altitudeUnits = nmea_tokenizer_get(tzer, 10);
nmea_reader_update_time(r, tok_time);
nmea_reader_update_latlong(r, tok_latitude,
tok_latitudeHemi.p[0],
tok_longitude,
tok_longitudeHemi.p[0]);
nmea_reader_update_altitude(r, tok_altitude, tok_altitudeUnits);
}
else if (!memcmp(tok.p, "GSA", 3)) {
Token tok_fix = nmea_tokenizer_get(tzer, 2);
Token tok_svs = nmea_tokenizer_get(tzer, 18);
switch(tok_svs.p[0]) {
case '1':
sv_type = GNSS_CONSTELLATION_GPS;
break;
case '2':
sv_type = GNSS_CONSTELLATION_GLONASS;
break;
case '4':
sv_type = GNSS_CONSTELLATION_BEIDOU;
break;
default:
break;
}
int idx, max = 12; /*the number of satellites in GPGSA*/
r->fix_mode = str2int(tok_fix.p, tok_fix.end);
if (LOC_FIXED(r)) { /* 1: No fix; 2: 2D; 3: 3D*/
Token tok_accuracy = nmea_tokenizer_get(tzer, 15);
nmea_reader_update_accuracy(r, tok_accuracy); // pdop
for (idx = 0; idx < max; idx++) {
Token tok_satellite = nmea_tokenizer_get(tzer, idx+3);
if (tok_satellite.p == tok_satellite.end) {
DBG("GSA: found %d active satellites\n", idx);
break;
}
int prn = str2int(tok_satellite.p, tok_satellite.end);
int svid = get_svid(prn, sv_type);
if (svid >= 0 && svid < 256)
r->sv_used_in_fix[svid] = 1;
/*
if (sv_type == GNSS_CONSTELLATION_BEIDOU) {
sate_id += 200;
}
else if (sv_type == GNSS_CONSTELLATION_GLONASS) {
sate_id += 64;
}
if (sate_id >= 1 && sate_id <= 32) { // GP
r->sv_used_in_fix[sate_id] = 1;
} else if (sate_id >= 193 && sate_id <= 197) {
r->sv_used_in_fix[sate_id] = 0;
DBG("[debug mask]QZSS, just ignore. satellite id is %d\n ", sate_id);
continue;
} else if (sate_id >= 65 && sate_id <= 96) { // GL
r->sv_used_in_fix[sate_id] = 1;
} else if (sate_id >= 201 && sate_id <= 232) { // BD
r->sv_used_in_fix[sate_id] = 1;
}
else {
VER("GSA: invalid sentence, ignore!!");
break;
}
DBG("GSA:sv_used_in_fix[%d] = %d\n", svid, r->sv_used_in_fix[svid]);
*/
}
}
}
else if (!memcmp(tok.p, "RMC", 3)) {
Token tok_time = nmea_tokenizer_get(tzer, 1);
Token tok_fixStatus = nmea_tokenizer_get(tzer, 2);
Token tok_latitude = nmea_tokenizer_get(tzer, 3);
Token tok_latitudeHemi = nmea_tokenizer_get(tzer, 4);
Token tok_longitude = nmea_tokenizer_get(tzer, 5);
Token tok_longitudeHemi = nmea_tokenizer_get(tzer, 6);
Token tok_speed = nmea_tokenizer_get(tzer, 7);
Token tok_bearing = nmea_tokenizer_get(tzer, 8);
Token tok_date = nmea_tokenizer_get(tzer, 9);
VER("in RMC, fixStatus=%c", tok_fixStatus.p[0]);
if (tok_fixStatus.p[0] == 'A')
{
nmea_reader_update_date(r, tok_date, tok_time);
nmea_reader_update_latlong(r, tok_latitude,
tok_latitudeHemi.p[0],
tok_longitude,
tok_longitudeHemi.p[0]);
nmea_reader_update_bearing(r, tok_bearing);
nmea_reader_update_speed(r, tok_speed);
r->location_can_report = 1;
}
r->sv_status_can_report = 1;
} else if (!memcmp(tok.p, "GSV", 3)) {
Token tok_num = nmea_tokenizer_get(tzer, 1); // number of messages
Token tok_seq = nmea_tokenizer_get(tzer, 2); // sequence number
Token tok_cnt = nmea_tokenizer_get(tzer, 3); // Satellites in view
int num = str2int(tok_num.p, tok_num.end);
int seq = str2int(tok_seq.p, tok_seq.end);
int cnt = str2int(tok_cnt.p, tok_cnt.end);
int sv_base = (seq - 1)*NMEA_MAX_SV_INFO;
int sv_num = cnt - sv_base;
int idx, base = 4, base_idx;
if (sv_num > NMEA_MAX_SV_INFO)
sv_num = NMEA_MAX_SV_INFO;
if (seq == 1) /*if sequence number is 1, a new set of GSV will be parsed*/
r->sv_count = 0;
for (idx = 0; idx < sv_num; idx++) {
base_idx = base*(idx+1);
Token tok_id = nmea_tokenizer_get(tzer, base_idx+0);
int prn = str2int(tok_id.p, tok_id.end);
int svid = get_svid(prn, sv_type);
/*
if (sv_type == GNSS_CONSTELLATION_BEIDOU) {
sv_id += 200;
DBG("It is BDS SV: %d", sv_id);
}
else if (sv_type == GNSS_CONSTELLATION_GLONASS) {
sv_id += 64;
DBG("It is GLN SV: %d", sv_id);
}
*/
Token tok_ele = nmea_tokenizer_get(tzer, base_idx+1);
Token tok_azi = nmea_tokenizer_get(tzer, base_idx+2);
Token tok_snr = nmea_tokenizer_get(tzer, base_idx+3);
nmea_reader_update_sv_status_gnss(r, sv_base+idx, svid, tok_ele, tok_azi, tok_snr);
}
if (seq == num) {
if (r->sv_count <= cnt) {
DBG("r->sv_count = %d", r->sv_count);
r->sv_status_gnss.num_svs += r->sv_count;
} else {
ERR("GPGSV incomplete (%d/%d), ignored!", r->sv_count, cnt);
r->sv_count = r->sv_status_gnss.num_svs = 0;
}
}
}
// Add for Accuracy
else if (!memcmp(tok.p, "ACCURACY", 8)) {
if ((r->fix_mode == 3) || (r->fix_mode == 2)) {
Token tok_accuracy = nmea_tokenizer_get(tzer, 1);
nmea_reader_update_accuracy(r, tok_accuracy);
DBG("GPS get accuracy from driver:%f\n", r->fix.accuracy);
}
else {
DBG("GPS get accuracy failed, fix mode:%d\n", r->fix_mode);
}
}
else {
tok.p -= 2;
VER("unknown sentence '%.*s", tok.end-tok.p, tok.p);
}
//if (!LOC_FIXED(r)) {
// VER("Location is not fixed, ignored callback\n");
//} else if (r->fix.flags != 0 && gps_nmea_end_tag) {
if (r->location_can_report) {
#if NEMA_DEBUG
char temp[256];
char* p = temp;
char* end = p + sizeof(temp);
struct tm utc;
p += snprintf(p, end-p, "sending fix");
if (r->fix.flags & GPS_LOCATION_HAS_LAT_LONG) {
p += snprintf(p, end-p, " lat=%g lon=%g", r->fix.latitude, r->fix.longitude);
}
if (r->fix.flags & GPS_LOCATION_HAS_ALTITUDE) {
p += snprintf(p, end-p, " altitude=%g", r->fix.altitude);
}
if (r->fix.flags & GPS_LOCATION_HAS_SPEED) {
p += snprintf(p, end-p, " speed=%g", r->fix.speed);
}
if (r->fix.flags & GPS_LOCATION_HAS_BEARING) {
p += snprintf(p, end-p, " bearing=%g", r->fix.bearing);
}
if (r->fix.flags & GPS_LOCATION_HAS_ACCURACY) {
p += snprintf(p, end-p, " accuracy=%g", r->fix.accuracy);
DBG("GPS accuracy=%g\n", r->fix.accuracy);
}
gmtime_r((time_t*) &r->fix.timestamp, &utc);
p += snprintf(p, end-p, " time=%s", asctime(&utc));
VER(temp);
#endif
r->fix.flags = GPS_LOCATION_HAS_LAT_LONG | GPS_LOCATION_HAS_ALTITUDE | GPS_LOCATION_HAS_SPEED | GPS_LOCATION_HAS_BEARING | GPS_LOCATION_HAS_ACCURACY;
callback_backup.location_cb(&r->fix);
r->fix.flags = 0;
r->location_can_report = 0;
}
DBG("r->sv_status_gnss.num_svs = %d, gps_nmea_end_tag = %d, sv_status_can_report = %d", r->sv_status_gnss.num_svs, gps_nmea_end_tag, r->sv_status_can_report);
if (r->sv_status_can_report) {
r->sv_status_can_report = 0;
if (r->sv_status_gnss.num_svs != 0) {
r->sv_status_gnss.size = sizeof(GnssSvStatus);
DBG("Report sv status");
callback_backup.gnss_sv_status_cb(&r->sv_status_gnss);
r->sv_count = r->sv_status_gnss.num_svs = 0;
memset(r->sv_used_in_fix, 0, 256*sizeof(int));
}
}
}
static void
nmea_reader_addc(NmeaReader* const r, int c)
{
if (r->overflow) {
r->overflow = (c != '\n');
return;
}
if ((r->pos >= (int) sizeof(r->in)-1 ) || (r->pos < 0)) {
r->overflow = 1;
r->pos = 0;
DBG("nmea sentence overflow\n");
return;
}
r->in[r->pos] = (char)c;
r->pos += 1;
if (c == '\n') {
r->in[r->pos + 1] = 0; // null terminate the string
nmea_reader_parse(r);
DBG("start nmea_cb\n");
callback_backup.nmea_cb(r->fix.timestamp, r->in, r->pos+1);
r->pos = 0;
}
}
static void
gps_state_done(GpsState* s)
{
char cmd = CMD_QUIT;
write(s->control[0], &cmd, 1);
close(s->control[0]);
s->control[0] = -1;
close(s->control[1]);
s->control[1] = -1;
close(s->fd);
s->fd = -1;
close(s->sockfd);
s->sockfd = -1;
close(s->epoll_hd);
s->epoll_hd = -1;
s->init = 0;
return;
}
static void
gps_state_start(GpsState* s)
{
char cmd = CMD_START;
int ret;
do {
ret = write(s->control[0], &cmd, 1);
}
while (ret < 0 && errno == EINTR);
if (ret != 1)
ERR("%s: could not send CMD_START command: ret=%d: %s",
__FUNCTION__, ret, strerror(errno));
}
static void
gps_state_stop(GpsState* s)
{
char cmd = CMD_STOP;
int ret;
do {
ret = write(s->control[0], &cmd, 1);
}
while (ret < 0 && errno == EINTR);
if (ret != 1)
ERR("%s: could not send CMD_STOP command: ret=%d: %s",
__FUNCTION__, ret, strerror(errno));
}
static void
gps_state_restart(GpsState* s)
{
char cmd = CMD_RESTART;
int ret;
do {
ret = write(s->control[0], &cmd, 1);
}
while (ret < 0 && errno == EINTR);
if (ret != 1)
ERR("%s: could not send CMD_RESTART command: ret=%d: %s",
__FUNCTION__, ret, strerror(errno));
}
static int
epoll_register(int epoll_fd, int fd)
{
struct epoll_event ev;
int ret, flags;
/* important: make the fd non-blocking */
flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | O_NONBLOCK);
ev.events = EPOLLIN;
ev.data.fd = fd;
do {
ret = epoll_ctl(epoll_fd, EPOLL_CTL_ADD, fd, &ev);
} while (ret < 0 && errno == EINTR);
if (ret < 0)
ERR("epoll ctl error, error num is %d\n, message is %s\n", errno, strerror(errno));
return ret;
}
static int
epoll_deregister(int epoll_fd, int fd)
{
int ret;
do {
ret = epoll_ctl(epoll_fd, EPOLL_CTL_DEL, fd, NULL);
} while (ret < 0 && errno == EINTR);
return ret;
}
/*for reducing the function call to get data from kernel*/
static char buff[2048];
/* this is the main thread, it waits for commands from gps_state_start/stop and,
* when started, messages from the GPS daemon. these are simple NMEA sentences
* that must be parsed to be converted into GPS fixes sent to the framework
*/
void
gps_state_thread(void* arg)
{
static float count = 0;
GpsState* state = (GpsState*) arg;
// state->thread_exit_flag=0;
NmeaReader reader[1];
int gps_fd = state->fd;
int control_fd = state->control[1];
int atc_fd = state->sockfd;
int epoll_fd = state->epoll_hd;
int test_started = 0;
nmea_reader_init(reader);
// register control file descriptors for polling
if (epoll_register(epoll_fd, control_fd) < 0)
ERR("epoll register control_fd error, error num is %d\n, message is %s\n", errno, strerror(errno));
if (epoll_register(epoll_fd, gps_fd) < 0)
ERR("epoll register gps_fd error, error num is %d\n, message is %s\n", errno, strerror(errno));
if (epoll_register(epoll_fd, atc_fd) < 0)
ERR("epoll register atc_fd error, error num is %d\n, message is %s\n", errno, strerror(errno));
DBG("gps thread running: PPID[%d], PID[%d]\n", getppid(), getpid());
DBG("HAL thread is ready, realease lock, and CMD_START can be handled\n");
// now loop
for (;;) {
struct epoll_event events[4];
int ne, nevents;
nevents = epoll_wait(epoll_fd, events, 4, -1);
if (nevents < 0) {
if (errno != EINTR)
ERR("epoll_wait() unexpected error: %s", strerror(errno));
continue;
}
VER("gps thread received %d events", nevents);
for (ne = 0; ne < nevents; ne++) {
if ((events[ne].events & (EPOLLERR|EPOLLHUP)) != 0) {
ERR("EPOLLERR or EPOLLHUP after epoll_wait() !?");
goto Exit;
}
if ((events[ne].events & EPOLLIN) != 0) {
int fd = events[ne].data.fd;
if (fd == control_fd) {
char cmd = 255;
int ret;
DBG("gps control fd event");
do {
ret = read(fd, &cmd, 1);
} while (ret < 0 && errno == EINTR);
if (cmd == CMD_QUIT) {
DBG("gps thread quitting on demand");
goto Exit;
}
else if (cmd == CMD_START) {
if (!started) {
DBG("gps thread starting location_cb=%p", &callback_backup);
started = 1;
nmea_reader_set_callback(reader, &state->callbacks);
}
}
else if (cmd == CMD_STOP) {
if (started) {
DBG("gps thread stopping");
started = 0;
nmea_reader_set_callback(reader, NULL);
DBG("CMD_STOP has been receiving from HAL thread, release lock so can handle CLEAN_UP\n");
}
}
else if (cmd == CMD_RESTART) {
reader->fix_mode = 0;
}
}
else if (fd == gps_fd) {
if (!flag_unlock) {
flag_unlock = 1;
DBG("got first NMEA sentence, release lock to set state ENGINE ON, SESSION BEGIN");
}
VER("gps fd event");
if (report_time_interval > ++count) {
DBG("[trace]count is %f\n", count);
int ret = read(fd, buff, sizeof(buff));
continue;
}
count = 0;
for (;;) {
int nn, ret;
ret = read(fd, buff, sizeof(buff));
if (ret < 0) {
if (errno == EINTR)
continue;
if (errno != EWOULDBLOCK)
ERR("error while reading from gps daemon socket: %s: %p", strerror(errno), buff);
break;
}
DBG("received %d bytes:\n", ret);
gps_nmea_end_tag = 0;
for (nn = 0; nn < ret; nn++)
{
if (nn == (ret-1))
gps_nmea_end_tag = 1;
nmea_reader_addc(reader, buff[nn]);
}
}
VER("gps fd event end");
}
else
{
ERR("epoll_wait() returned unkown fd %d ?", fd);
}
}
}
}
Exit:
DBG("HAL thread is exiting, release lock to clean resources\n");
return;
}
static void
gps_state_init(GpsState* state)
{
state->control[0] = -1;
state->control[1] = -1;
state->fd = -1;
DBG("Try open gps hardware: %s", GPS_CHANNEL_NAME);
state->fd = open(GPS_CHANNEL_NAME, O_RDONLY); // support poll behavior
//state->fd = open(GPS_CHANNEL_NAME, O_RDWR | O_NONBLOCK | O_NOCTTY);
int epoll_fd = epoll_create(2);
state->epoll_hd = epoll_fd;
if (state->fd < 0) {
ERR("no gps hardware detected: %s:%d, %s", GPS_CHANNEL_NAME, state->fd, strerror(errno));
return;
}
struct termios cfg;
tcgetattr(state->fd, &cfg);
cfmakeraw(&cfg);
cfsetispeed(&cfg, TTY_BAUD);
cfsetospeed(&cfg, TTY_BAUD);
tcsetattr(state->fd, TCSANOW, &cfg);
DBG("Open gps hardware succeed: %s", GPS_CHANNEL_NAME);
if (socketpair(AF_LOCAL, SOCK_STREAM, 0, state->control) < 0) {
ERR("could not create thread control socket pair: %s", strerror(errno));
goto Fail;
}
state->thread = callback_backup.create_thread_cb(gps_native_thread, gps_state_thread, state);
if (!state->thread) {
ERR("could not create gps thread: %s", strerror(errno));
goto Fail;
}
DBG("gps state initialized, the thread is %d\n", (int)state->thread);
return;
Fail:
gps_state_done(state);
}
/*****************************************************************/
/*****************************************************************/
/***** *****/
/***** I N T E R F A C E *****/
/***** *****/
/*****************************************************************/
/*****************************************************************/
static int
zkw_gps_init(GpsCallbacks* callbacks)
{
GpsState* s = _gps_state;
int get_time = 20;
int res = 0;
if (s->init)
return 0;
s->callbacks = *callbacks;
callback_backup = *callbacks;
gps_state_init(s);
s->init = 1;
if (s->fd < 0) {
return -1;
}
DBG("Set GPS_CAPABILITY_SCHEDULING \n");
callback_backup.set_capabilities_cb(GPS_CAPABILITY_SCHEDULING);
return 0;
}
static void
zkw_gps_cleanup(void)
{
GpsState* s = _gps_state;
if (s->init)
gps_state_done(s);
DBG("zkw_gps_cleanup done");
// return NULL;
}
int
zkw_gps_start()
{
GpsState* s = _gps_state;
int err;
int count=0;
if (!s->init) {
ERR("%s: called with uninitialized state !!", __FUNCTION__);
return -1;
}
DBG("HAL thread has initialiazed\n");
gps_state_start(s);
gps_status.status = GPS_STATUS_ENGINE_ON;
DBG("gps_status = GPS_STATUS_ENGINE_ON\n");
callback_backup.status_cb(&gps_status);
gps_status.status = GPS_STATUS_SESSION_BEGIN;
DBG("gps_status = GPS_STATUS_SESSION_BEGIN\n");
callback_backup.status_cb(&gps_status);
callback_backup.acquire_wakelock_cb();
s->start_flag = 1;
DBG("s->start_flag = 1\n");
return 0;
}
int
zkw_gps_stop()
{
GpsState* s = _gps_state;
int err;
int count=0;
if (!s->init) {
ERR("%s: called with uninitialized state !!", __FUNCTION__);
return -1;
}
gps_state_stop(s);
gps_status.status = GPS_STATUS_SESSION_END;
callback_backup.status_cb(&gps_status);
DBG("gps_status = GPS_STATUS_SESSION_END\n");
gps_status.status = GPS_STATUS_ENGINE_OFF;
DBG("gps_status = GPS_STATUS_ENGINE_OFF\n");
callback_backup.status_cb(&gps_status);
callback_backup.release_wakelock_cb();
s->start_flag = 0;
DBG("s->start_flag = 0\n");
return 0;
}
static int
zkw_gps_inject_time(GpsUtcTime time, int64_t timeReference, int uncertainty)
{
return 0;
}
static int
zkw_gps_inject_location(double latitude, double longitude, float accuracy)
{
return 0;
}
static void
zkw_gps_delete_aiding_data(GpsAidingData flags)
{
return;
}
static int
zkw_gps_set_position_mode(GpsPositionMode mode, GpsPositionRecurrence recurrence, uint32_t min_interval, uint32_t preferred_accuracy, uint32_t preferred_time)
{
// FIXME - support fix_frequency
return 0;
}
static const void*
zkw_gps_get_extension(const char* name)
{
DBG("zkw_gps_get_extension name=[%s]\n", name);
/*
TRC();
if (strncmp(name, "agps", strlen(name)) == 0) {
return &zkwAGpsInterface;
}
if (strncmp(name, "gps-ni", strlen(name)) == 0) {
return &zkwGpsNiInterface;
}
if (strncmp(name, "agps_ril", strlen(name)) == 0) {
return &zkwAGpsRilInterface;
}
if (strncmp(name, "supl-certificate", strlen(name)) == 0) {
return &zkwSuplCertificateInterface;
}
if (strncmp(name, GPS_MEASUREMENT_INTERFACE, strlen(name)) == 0) {
return &zkwGpsMeasurementInterface;
}
if (strncmp(name, GPS_NAVIGATION_MESSAGE_INTERFACE, strlen(name)) == 0) {
return &zkwGpsNavigationMessageInterface;
}*/
return NULL;
}
static const GpsInterface zkwGpsInterface = {
sizeof(GpsInterface),
zkw_gps_init,
zkw_gps_start,
zkw_gps_stop,
zkw_gps_cleanup,
zkw_gps_inject_time,
zkw_gps_inject_location,
zkw_gps_delete_aiding_data,
zkw_gps_set_position_mode,
zkw_gps_get_extension,
};
const GpsInterface* gps__get_gps_interface(struct gps_device_t* dev)
{
DBG("gps__get_gps_interface HAL\n");
return &zkwGpsInterface;
}
static int open_gps(const struct hw_module_t* module, char const* name,
struct hw_device_t** device) {
DBG("open_gps HAL 1\n");
struct gps_device_t *dev = malloc(sizeof(struct gps_device_t));
if (dev != NULL) {
memset(dev, 0, sizeof(*dev));
dev->common.tag = HARDWARE_DEVICE_TAG;
dev->common.version = 0;
dev->common.module = (struct hw_module_t*)module;
// dev->common.close = (int (*)(struct hw_device_t*))close_lights;
DBG("open_gps HAL 2\n");
dev->get_gps_interface = gps__get_gps_interface;
DBG("open_gps HAL 3\n");
*device = (struct hw_device_t*)dev;
} else {
DBG("malloc failed dev = NULL!\n");
}
return 0;
}
static struct hw_module_methods_t gps_module_methods = {
.open = open_gps
};
struct hw_module_t HAL_MODULE_INFO_SYM = {
.tag = HARDWARE_MODULE_TAG,
.version_major = 1,
.version_minor = 0,
.id = GPS_HARDWARE_MODULE_ID,
.name = "Hardware GPS Module",
.author = "",
.methods = &gps_module_methods,
};
编译文件Android.mk参考:文章来源地址https://www.toymoban.com/news/detail-615941.html
# Copyright (C) 2008 The Android Open Source Project
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
LOCAL_PATH := $(call my-dir)
# HAL module implemenation, not prelinked and stored in
# hw/<LIGHTS_HARDWARE_MODULE_ID>.default.so
include $(CLEAR_VARS)
LOCAL_PROPRIETARY_MODULE := true
LOCAL_MODULE_TAGS:=optional
LOCAL_PRELINK_MODULE := false
#LOCAL_MULTILIB := 32
LOCAL_MODULE := gps.default
LOCAL_MODULE_RELATIVE_PATH := hw
LOCAL_SRC_FILES := gps_zkw.c
#LOCAL_CFLAGS := -Wall -fvisibility=default -fsigned-char
LOCAL_CFLAGS := -Wno-unused-parameter -Wno-unused-variable -Wno-format -Wno-unused-function
LOCAL_SHARED_LIBRARIES := liblog libc libcutils libm libhardware libutils
include $(BUILD_SHARED_LIBRARY)
到了这里,关于RK3588 Android 12 北斗模块调试的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!