由于本人做题目时发现正点原子的串口发送教程是单字节,也在网上找了许多案例,但都不是很满意,这里借鉴了一下B站江科大UP主的代码,结合自己的需求,改了一下,大家可以参考一下,讲的很好,话不多说,直接上代码,希望帮助更多小伙伴。同时哪里不对的地方望大神多多指教。
usart.c
头文件自己添加
#if 1
#pragma import(__use_no_semihosting)
uint8_t Serial_TxPacket[4]; //FF 01 02 03 04 FE
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag;
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while ((USART1->SR & 0X40) == 0); //循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
//#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA = 0; //接收状态标记
char rxarray[4];
uint8_t rxlength=0;
//字符串发送函数
void HMISends(char *buf1)
{
u8 i=0;
while(1)
{
if(buf1[i] != 0)
{
USART_SendData(USART1,buf1[i]); //发送一个字节
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET){};//等待发送结束
i++;
}
else
{
return ;
}
}
}
//字节发送函数
void HMISendb(u8 k)
{
u8 i;
for(i=0; i<3; i++)
{
if(k != 0)
{
USART_SendData(USART1,k); //发送一个字节
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET){};//等待发送结束
}
else
{
return ;
}
}
}
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
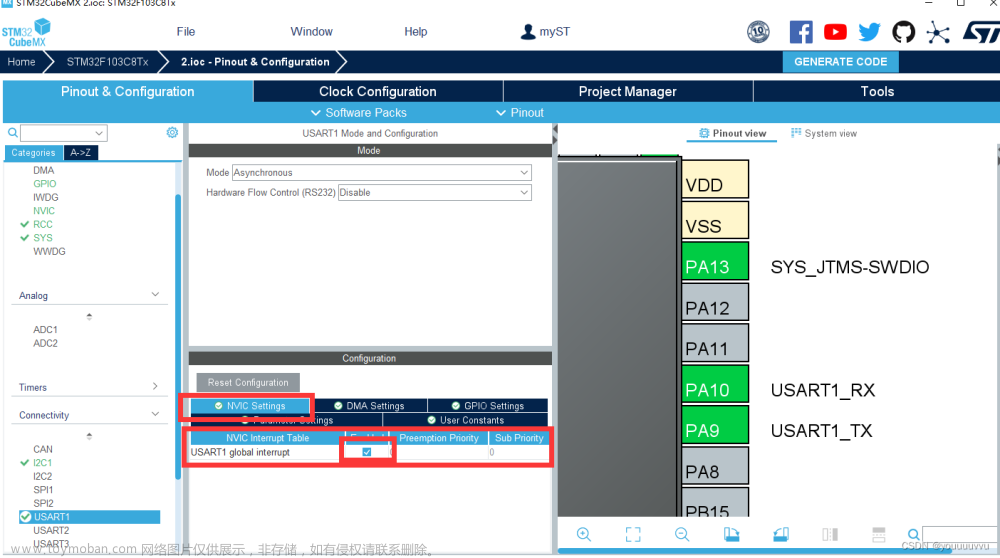
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3 ; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendPacket(void) //发送字头
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket, 4);
Serial_SendByte(0xFE);
}
uint8_t Serial_GetRxFlag(void) //读取状态位
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
char tjcstr[100];
void USART1_IRQHandler(void)
{
int a=9;
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
// printf ("%d",RxData);
if (RxState == 0)
{
if (RxData == 0xFF)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
if (pRxPacket >= 4)
{
RxState = 2;
}
}
else if (RxState == 2)
{
if (RxData == 0xFE)
{
RxState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
extern char rxarray[4];
extern uint8_t rxlength;
extern uint8_t Serial_TxPacket[];
extern uint8_t Serial_RxPacket[];
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
void Serial_SendPacket(void);
uint8_t Serial_GetRxFlag(void);
#endif大家需要注意的是发送数据格式,当然包头包尾自己可以改下哈。
格式:FF 12 45 67 89 FE
我们发送的数据都被数组接收了,那怎样打印出来尼,看大招。
while(1)
{
if (Serial_GetRxFlag() == 1)
{
for(i=0;i<4;i++)
{
printf ("%x", Serial_RxPacket[i]);
}
}
}方法2
if(rxlength == 4)
{
//int rxint = (rxarray[0] << 24) | (rxarray[1] << 16) | (rxarray[2] << 8) | (rxarray[3]);
//printf("get %c,%c,%c,%c",rxarray[0],rxarray[1],rxarray[2],rxarray[3]);
union tmpa2i
{
char tmpa[4];
int tmpi;
}
tmpa2i1;
tmpa2i1.tmpa[0] = rxarray[0];
tmpa2i1.tmpa[1] = rxarray[1];
tmpa2i1.tmpa[2] = rxarray[2];
tmpa2i1.tmpa[3] = rxarray[3];
int rxint = tmpa2i1.tmpi;
printf("\x01\xff\xff\xffpage2.n7.val=%d\xff\xff\xff",rxint);
rxlength = 0;
}他们的原理都差不多,都是数组接收,打印的方式不一样罢了,方法2是串口屏给单片机发送数据时写的,大家如果使用的是串口屏的话推荐看方法2。文章来源:https://www.toymoban.com/news/detail-616285.html
如果还是看不懂,建议大家看看江科大的视频。
需要源代码的伙伴评论区聊吧。文章来源地址https://www.toymoban.com/news/detail-616285.html
到了这里,关于STM32多字节发送与接收(附淘晶驰串口屏教程)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!