Walking Robot Simulation 模拟行走机器人
问题描述:
机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands :
-2 :向左转 90 度
-1 :向右转 90 度
1
<
=
x
<
=
9
1 <= x <= 9
1<=x<=9 :向前移动 x 个单位长度
在网格上有一些格子被视为障碍物 obstacles 。第 i 个障碍物位于网格点
o
b
s
t
a
c
l
e
s
[
i
]
=
(
x
i
,
y
i
)
obstacles[i] = (x_i, y_i)
obstacles[i]=(xi,yi)。
机器人无法走到障碍物上,它将会停留在障碍物的前一个网格方块上,但仍然可以继续尝试进行该路线的其余部分。
返回从原点到机器人所有经过的路径点(坐标为整数)的最大欧式距离的平方。(即,如果距离为 5 ,则返回 25 )
1 < = c o m m a n d s . l e n g t h < = 1 0 4 c o m m a n d s [ i ] i s o n e o f t h e v a l u e s i n t h e l i s t [ − 2 , − 1 , 1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9 ] 0 < = o b s t a c l e s . l e n g t h < = 1 0 4 − 3 ∗ 1 0 4 < = x i , y i < = 3 ∗ 1 0 4 答案保证小于 2 31 1 <= commands.length <= 10^4\\ commands[i] is one of the values in the list [-2,-1,1,2,3,4,5,6,7,8,9]\\ 0 <= obstacles.length <= 10^4\\ -3 * 10^4 <= xi, yi <= 3 * 10^4\\ 答案保证小于 2^{31} 1<=commands.length<=104commands[i]isoneofthevaluesinthelist[−2,−1,1,2,3,4,5,6,7,8,9]0<=obstacles.length<=104−3∗104<=xi,yi<=3∗104答案保证小于231
分析
模拟问题属于看上去很简单,但是做起来处处是坑。
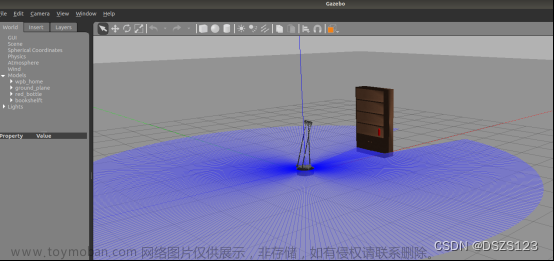
这个问题中,可以移动的范围可以看做是一个二维直角坐标系。起始点是原点[0,0],这个移动范围是不受边界限制的,它不同于一般的矩阵,有行列大小限制。
唯一受到的限制就是obstacle,而且移动的方向是4向,上下左右。
最简单的方式,就是在每次移动时确定要移动的方向,然后移动C步,每移动一步,需要判断是否遇到obstacle,如果遇到,就需要在obstacle之前停止。
如果是普通的判断坐标是否是obstacle,就需要遍历O(N)的长度,而command的次数是 1 0 4 10^4 104,所以整体来看,这个算法很可能TLE.
所以需要在某个环节进行加速,很明显只能在判断的环节,进行加速。
加速的方式有几种,目标就是缩短判断的时间复杂度,最常见的就是HashMap。
移动的过程中一定是有x或者y保持不变,
只要每次判断移动的nx,ny是否是obstacle,所以时间复杂度基本可以达到O(1).
当然预处理hashmap 的时间复杂度也大概需要
O
(
N
)
O(N)
O(N),整体的时间复杂度
O
(
N
+
M
∗
C
)
O(N+M*C)
O(N+M∗C).
代码
哈希
public int robotSim(int[] commands, int[][] obstacles) {
int[][] dirs = {{-1, 0}, {0, 1}, {1, 0}, {0, -1}};
int px = 0, py = 0, d = 1;
Set<Integer> set = new HashSet<Integer>();
for (int[] obstacle : obstacles) {
set.add(obstacle[0] * 60001 + obstacle[1]);
}
int res = 0;
for (int c : commands) {
if (c < 0) {
d += c == -1 ? 1 : -1;
d %= 4;
if (d < 0) {
d += 4;
}
} else {
for (int i = 0; i < c; i++) {
if (set.contains((px + dirs[d][0]) * 60001 + py + dirs[d][1])) {
break;
}
px += dirs[d][0];
py += dirs[d][1];
res = Math.max(res, px * px + py * py);
}
}
}
return res;
}
时间复杂度 O ( N + M ∗ C ) O(N+M*C) O(N+M∗C)
空间复杂度 O ( M ) O(M) O(M)
Tag
Array文章来源:https://www.toymoban.com/news/detail-616396.html
Simulation文章来源地址https://www.toymoban.com/news/detail-616396.html
到了这里,关于【LeetCode 算法】Walking Robot Simulation 模拟行走机器人 - 哈希的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!