前言
本篇文章将会分享如何用OpenMV接收到stm32单片机传来的数据。
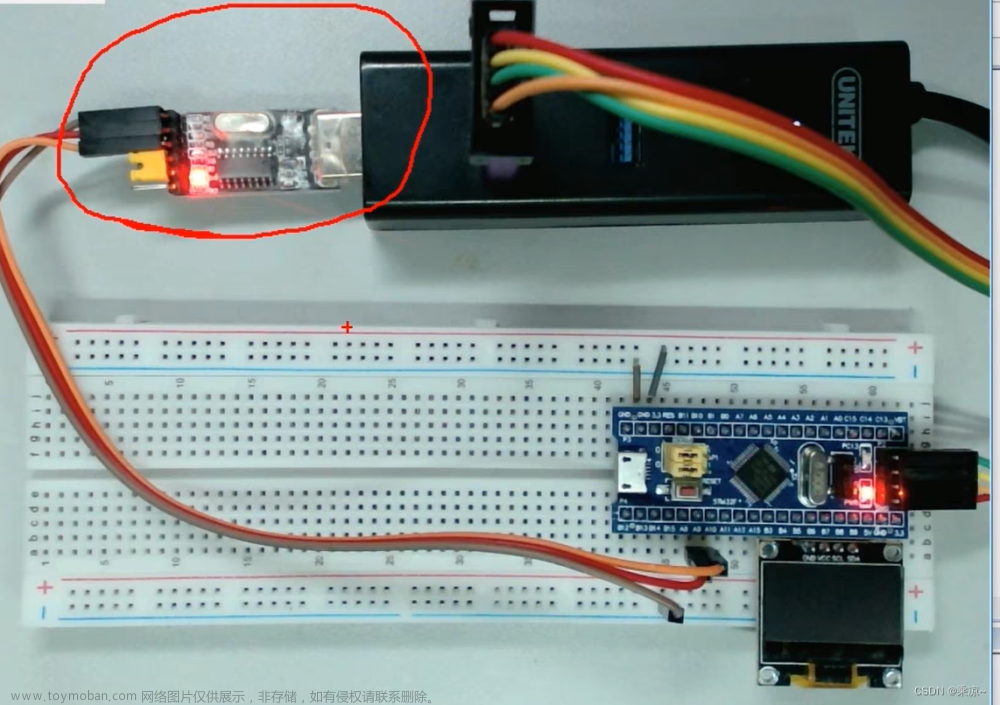
一、连线
| OpenMV | stm32 |
|---|---|
| p4 | PA3 |
| p5 | PA2 |
| GND | GND |
二、程序源码
1.OpenMV源码
代码如下(示例):
import sensor, image, time
from pyb import UART
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
clock = time.clock()
rx_buff=[]
state = 0
tx_flag = 0
uart = UART(3, 115200, timeout_char=1000)
#串口接收函数
def Receive_Prepare(data):
global state
global tx_flag
if state==0:
if data == 0x0d:#帧头
state = 1
else:
state = 0
rx_buff.clear()
elif state==1:
rx_buff.append(data)
state = 2
elif state==2:
rx_buff.append(data)
state = 3
elif state == 3:
if data == 0x5b:
tx_flag = int(rx_buff[0])
state = 4
else:
state = 0
rx_buff.clear()
while(True):
clock.tick()
img = sensor.snapshot()
if(uart.any()>0):
c=uart.readchar()
Receive_Prepare(c)
print(c)
2.32单片机源码
代码如下(示例):
#include "sys.h"
#include "usart2.h"
#include "delay.h"
u8 send_buff[2] = {1,1};
void Usart2_Sendata()
{
u8 i = 0;
USART_SendData(USART2,0x0d);
while( USART_GetFlagStatus(USART2,USART_FLAG_TC)!= SET);
for(i = 0;i < 2;i++)
{
USART_SendData(USART2,send_buff[i]);
while( USART_GetFlagStatus(USART2,USART_FLAG_TC)!= SET);
}
USART_SendData(USART2,0x5b);
while( USART_GetFlagStatus(USART2,USART_FLAG_TC)!= SET);
}
int main(void)
{
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart2_init(115200);
while(1)
{
Usart2_Sendata();
}
}
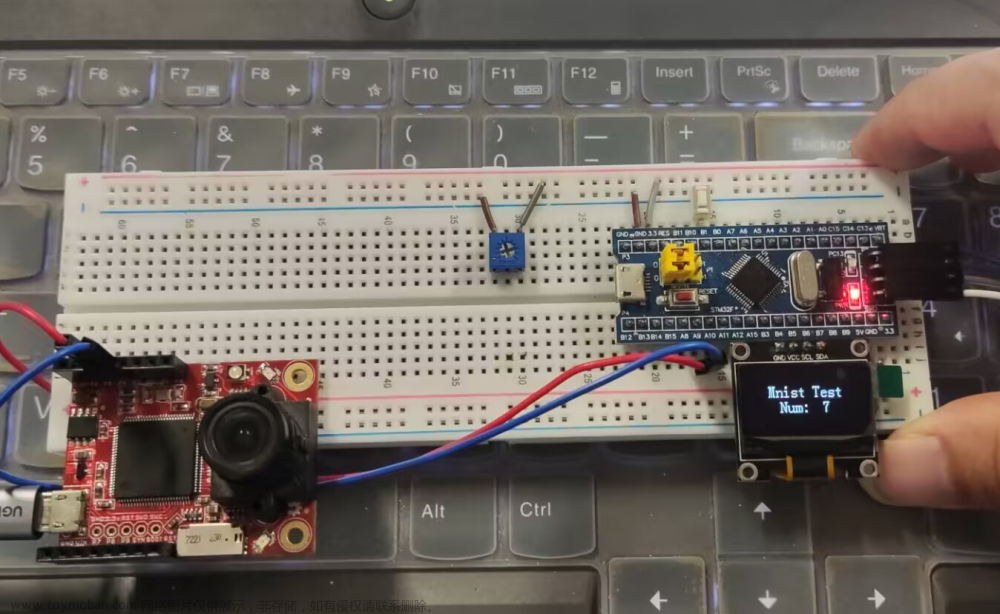
三、运行效果
 文章来源:https://www.toymoban.com/news/detail-617182.html
文章来源:https://www.toymoban.com/news/detail-617182.html
总结
本篇文章分享了博主在准备电赛期间所写的OpenMV接收stm32单片机传来的数据OpenMV程序和stm32单片机程序,有不足之处,还请斧正!
完整工程源码文章来源地址https://www.toymoban.com/news/detail-617182.html
到了这里,关于OpenMV接收stm32单片机数据的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!