头文件
/*******************************************************************************
* Copyright (c) [scl]。保留所有权利。
* 本文仅供个人学习和研究使用,禁止用于商业用途。
******************************************************************************/
#ifndef STM32_F1XX_TEMPLATE_BSP_GPIO_H
#define STM32_F1XX_TEMPLATE_BSP_GPIO_H
#include "sys_core.h"
#ifndef sys_force_static_inline
#define sys_force_static_inline __attribute__((always_inline)) static inline
#endif
enum pin_enum {
PA0, PA1, PA2, PA3, PA4, PA5, PA6, PA7, PA8, PA9, PA10, PA11, PA12, PA13, PA14, PA15,
PB0, PB1, PB2, PB3, PB4, PB5, PB6, PB7, PB8, PB9, PB10, PB11, PB12, PB13, PB14, PB15,
PC0, PC1, PC2, PC3, PC4, PC5, PC6, PC7, PC8, PC9, PC10, PC11, PC12, PC13, PC14, PC15,
PD0, PD1, PD2, PD3, PD4, PD5, PD6, PD7, PD8, PD9, PD10, PD11, PD12, PD13, PD14, PD15,
PE0, PE1, PE2, PE3, PE4, PE5, PE6, PE7, PE8, PE9, PE10, PE11, PE12, PE13, PE14, PE15,
PF0, PF1, PF2, PF3, PF4, PF5, PF6, PF7, PF8, PF9, PF10, PF11, PF12, PF13, PF14, PF15,
};
typedef struct stm_pin_define {
GPIO_TypeDef *port;
uint32_t pin;
} stm_pin_define_t;
#define GPIO_A_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define GPIO_B_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define GPIO_C_CLK_ENABLE() __HAL_RCC_GPIOC_CLK_ENABLE()
#define GPIO_D_CLK_ENABLE() __HAL_RCC_GPIOD_CLK_ENABLE()
#define GPIO_E_CLK_ENABLE() __HAL_RCC_GPIOE_CLK_ENABLE()
#define GPIO_F_CLK_ENABLE() __HAL_RCC_GPIOF_CLK_ENABLE()
#define GPIO_G_CLK_ENABLE() __HAL_RCC_GPIOG_CLK_ENABLE()
/*端口定义: stm_port_define(A,12)->PA12 */
#define stm_port_define(__PORT__, PIN) GPIO##__PORT__,GPIO_PIN_##PIN
#define gpio_init(port, pin, mode, pull, speed)\
do{\
__HAL_RCC_##port##_CLK_ENABLE();\
GPIO_InitTypeDef cnf ={pin,mode,pull,speed};\
HAL_GPIO_Init(port, &cnf);\
}while(0)
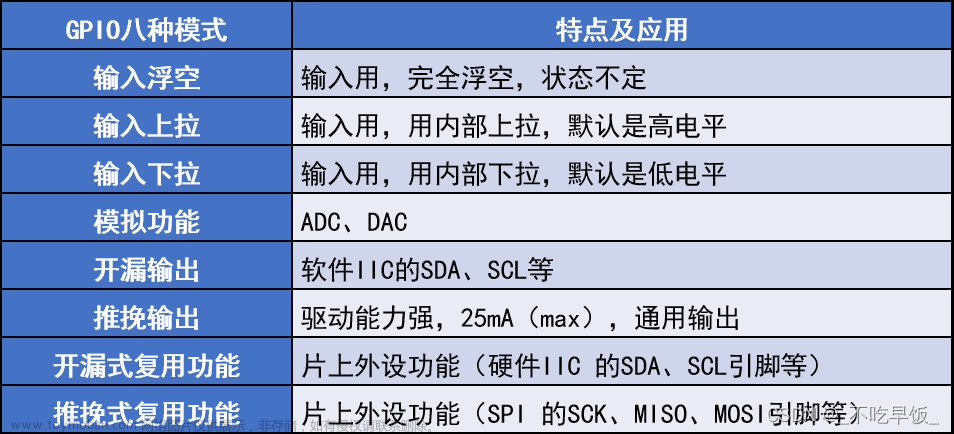
typedef enum {
pin_mode_output,
pin_mode_output_pull_up,
pin_mode_output_pull_down,
pin_mode_input,
pin_mode_input_pull_up,
pin_mode_input_analog,
pin_mode_input_pull_down,
pin_mode_output_od,
pin_mode_output_af_pp,
} pin_mode_type;
sys_force_static_inline void stm_pin_set(GPIO_TypeDef *port, uint32_t pin, GPIO_PinState state) {
HAL_GPIO_WritePin(port, pin, state);
}
sys_force_static_inline void stm_pin_high(GPIO_TypeDef *port, uint32_t pin) {
HAL_GPIO_WritePin(port, pin, GPIO_PIN_SET);
}
sys_force_static_inline GPIO_PinState stm_pin_read(GPIO_TypeDef *port, uint32_t pin) {
return HAL_GPIO_ReadPin(port, pin);
}
sys_force_static_inline void stm_pin_low(GPIO_TypeDef *port, uint32_t pin) {
HAL_GPIO_WritePin(port, pin, GPIO_PIN_RESET);
}
sys_force_static_inline void stm_pin_toggle(GPIO_TypeDef *port, uint32_t pin) {
HAL_GPIO_TogglePin(port, pin);
}
sys_force_static_inline void gpio_clk_enable(GPIO_TypeDef *port) {
if (port == GPIOA)GPIO_A_CLK_ENABLE();
else if (port == GPIOB)GPIO_B_CLK_ENABLE();
else if (port == GPIOC)GPIO_C_CLK_ENABLE();
else if (port == GPIOD)GPIO_D_CLK_ENABLE();
else if (port == GPIOE)GPIO_E_CLK_ENABLE();
else if (port == GPIOF)GPIO_F_CLK_ENABLE();
else if (port == GPIOG)GPIO_G_CLK_ENABLE();
}
sys_force_static_inline void stm32_pin_mode(GPIO_TypeDef *port, uint32_t pin, pin_mode_type mode) {
GPIO_InitTypeDef GPIO_InitStruct = {
.Pin = pin, .Mode = GPIO_MODE_OUTPUT_PP, .Speed = GPIO_SPEED_FREQ_HIGH, .Pull = GPIO_NOPULL};
gpio_clk_enable(port);
switch (mode) {
case pin_mode_output: {
/* output setting */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
break;
}
case pin_mode_output_pull_up: {
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
break;
}
case pin_mode_output_pull_down: {
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
break;
}
case pin_mode_input: {
/* input setting: not pull. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
break;
}
case pin_mode_input_pull_up: {
/* input setting: pull up. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
break;
}
case pin_mode_input_pull_down: {
/* input setting: pull down. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
break;
}
case pin_mode_output_od: {
/* output setting: od. */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
break;
}
case pin_mode_output_af_pp: {
/* output setting: od. */
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
break;
}
case pin_mode_input_analog: {
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
break;
}
}
HAL_GPIO_Init(port, &GPIO_InitStruct);
}
sys_force_static_inline void stm32_pin_define_mode_set(stm_pin_define_t *pin_define, pin_mode_type mode) {
stm32_pin_mode(pin_define->port, pin_define->pin, mode);
}
sys_force_static_inline void stm32_pin_define_high(stm_pin_define_t *pin_define) {
HAL_GPIO_WritePin(pin_define->port, pin_define->pin, GPIO_PIN_SET);
}
sys_force_static_inline void stm32_pin_define_low(stm_pin_define_t *pin_define) {
HAL_GPIO_WritePin(pin_define->port, pin_define->pin, GPIO_PIN_RESET);
}
sys_force_static_inline void stm32_pin_define_set(stm_pin_define_t *pin_define, GPIO_PinState state) {
HAL_GPIO_WritePin(pin_define->port, pin_define->pin, state);
}
sys_force_static_inline void stm32_pin_define_toggle(stm_pin_define_t *pin_define) {
HAL_GPIO_TogglePin(pin_define->port, pin_define->pin);
}
sys_force_static_inline GPIO_PinState stm32_pin_define_read(stm_pin_define_t *pin_define) {
return HAL_GPIO_ReadPin(pin_define->port, pin_define->pin);
}
struct stm_pin_define *stm_get_pin(enum pin_enum pin);
#endif //STM32_F1XX_TEMPLATE_BSP_GPIO_H
源文件
/*******************************************************************************
Copyright (c) [scl]。保留所有权利。
******************************************************************************/
#include "stm32f1xx_hal.h"
#include "bsp_gpio.h"
struct stm_pin_map {
enum pin_enum pin;
struct stm_pin_define define;
};
static struct stm_pin_map pin_map[] = {
{PA0, {stm_port_define(A, 0)}},
{PA1, {stm_port_define(A, 1)}},
{PA2, {stm_port_define(A, 2)}},
{PA3, {stm_port_define(A, 3)}},
{PA4, {stm_port_define(A, 4)}},
{PA5, {stm_port_define(A, 5)}},
{PA6, {stm_port_define(A, 6)}},
{PA7, {stm_port_define(A, 7)}},
{PA8, {stm_port_define(A, 8)}},
{PA9, {stm_port_define(A, 9)}},
{PA10, {stm_port_define(A, 10)}},
{PA11, {stm_port_define(A, 11)}},
{PA12, {stm_port_define(A, 12)}},
{PA13, {stm_port_define(A, 13)}},
{PA14, {stm_port_define(A, 14)}},
{PA15, {stm_port_define(A, 15)}},
{PB0, {stm_port_define(B, 0)}},
{PB1, {stm_port_define(B, 1)}},
{PB2, {stm_port_define(B, 2)}},
{PB3, {stm_port_define(B, 3)}},
{PB4, {stm_port_define(B, 4)}},
{PB5, {stm_port_define(B, 5)}},
{PB6, {stm_port_define(B, 6)}},
{PB7, {stm_port_define(B, 7)}},
{PB8, {stm_port_define(B, 8)}},
{PB9, {stm_port_define(B, 9)}},
{PB10, {stm_port_define(B, 10)}},
{PB11, {stm_port_define(B, 11)}},
{PB12, {stm_port_define(B, 12)}},
{PB13, {stm_port_define(B, 13)}},
{PB14, {stm_port_define(B, 14)}},
{PB15, {stm_port_define(B, 15)}},
{PC0, {stm_port_define(C, 0)}},
{PC1, {stm_port_define(C, 1)}},
{PC2, {stm_port_define(C, 2)}},
{PC3, {stm_port_define(C, 3)}},
{PC4, {stm_port_define(C, 4)}},
{PC5, {stm_port_define(C, 5)}},
{PC6, {stm_port_define(C, 6)}},
{PC7, {stm_port_define(C, 7)}},
{PC8, {stm_port_define(C, 8)}},
{PC9, {stm_port_define(C, 9)}},
{PC10, {stm_port_define(C, 10)}},
{PC11, {stm_port_define(C, 11)}},
{PC12, {stm_port_define(C, 12)}},
{PC13, {stm_port_define(C, 13)}},
{PC14, {stm_port_define(C, 14)}},
{PC15, {stm_port_define(C, 15)}},
{PD0, {stm_port_define(D, 0)}},
{PD1, {stm_port_define(D, 1)}},
{PD2, {stm_port_define(D, 2)}},
{PD3, {stm_port_define(D, 3)}},
{PD4, {stm_port_define(D, 4)}},
{PD5, {stm_port_define(D, 5)}},
{PD6, {stm_port_define(D, 6)}},
{PD7, {stm_port_define(D, 7)}},
{PD8, {stm_port_define(D, 8)}},
{PD9, {stm_port_define(D, 9)}},
{PD10, {stm_port_define(D, 10)}},
{PD11, {stm_port_define(D, 11)}},
{PD12, {stm_port_define(D, 12)}},
{PD13, {stm_port_define(D, 13)}},
{PD14, {stm_port_define(D, 14)}},
{PD15, {stm_port_define(D, 15)}},
{PE0, {stm_port_define(E, 0)}},
{PE1, {stm_port_define(E, 1)}},
{PE2, {stm_port_define(E, 2)}},
{PE3, {stm_port_define(E, 3)}},
{PE4, {stm_port_define(E, 4)}},
{PE5, {stm_port_define(E, 5)}},
{PE6, {stm_port_define(E, 6)}},
{PE7, {stm_port_define(E, 7)}},
{PE8, {stm_port_define(E, 8)}},
{PE9, {stm_port_define(E, 9)}},
{PE10, {stm_port_define(E, 10)}},
{PE11, {stm_port_define(E, 11)}},
{PE12, {stm_port_define(E, 12)}},
{PE13, {stm_port_define(E, 13)}},
{PE14, {stm_port_define(E, 14)}},
{PE15, {stm_port_define(E, 15)}},
{PF0, {stm_port_define(F, 0)}},
{PF1, {stm_port_define(F, 1)}},
{PF2, {stm_port_define(F, 2)}},
{PF3, {stm_port_define(F, 3)}},
{PF4, {stm_port_define(F, 4)}},
{PF5, {stm_port_define(F, 5)}},
{PF6, {stm_port_define(F, 6)}},
{PF7, {stm_port_define(F, 7)}},
{PF8, {stm_port_define(F, 8)}},
{PF9, {stm_port_define(F, 9)}},
{PF10, {stm_port_define(F, 10)}},
{PF11, {stm_port_define(F, 11)}},
{PF12, {stm_port_define(F, 12)}},
{PF13, {stm_port_define(F, 13)}},
{PF14, {stm_port_define(F, 14)}},
{PF15, {stm_port_define(F, 15)}}
};
struct stm_pin_define *stm_get_pin(enum pin_enum pin) {
return &pin_map[pin].define;
}
文章来源地址https://www.toymoban.com/news/detail-617429.html
文章来源:https://www.toymoban.com/news/detail-617429.html
到了这里,关于Clion开发STM32之HAL库GPIO宏定义封装(最新版)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!