目录
💥1 概述
1.1 功率损耗
编辑1.2 电压质量
1.3 DG总容量
📚2 运行结果
🌈3 Matlab代码实现
🎉4 参考文献
💥1 概述
参考文献:

本文采用的是换一个算法解决, 基于基于多目标粒子群算法分布式电源选址定容规划研究。
将可再生能源的分布式发电技术与大电网结 合,是 普 遍 公认的节能减排、绿色 环 保、安全可靠的电力系统运行方式, 是电力发展的方向。分布式电源(DG)是指在一定的地域范围内,以分散方式布置在用户附近, 与环境兼容的小型模块化发电单元,其发电功率为几千瓦到 几十兆瓦。
分布式发电系统目前大多与配电网并网运行。DG 入 电 网后,会对配电网的潮流分布产生影响,进而可以优化配电网 络,缓解配电网输 配 用 电 压 力。但 是 由 于 DG 的 投 入 和 退出有很大的随 机 性,且输出功率的稳定性易受环境影响,因此,DG的不当接入会对电网产生诸多负面影响,如 影 响 配 电网的稳定性及电压质量,产 生 谐 波 等。这 些 影 响 的 大 小 与DG的容量和接入位置有很大关,因此,DG 的选址定容是在 DG规划阶段中需要考虑的重点问题。
由于规划的优化目标较为单一,传 统 的 规 划 方 法 无 法 很 好地解决这一问题。近 年 来,考 虑 电 压、电流质量和环境等因素的多目标优化迅速发展,但量纲的不统一,使得求解的复杂性大大提高,给多目标优化提出了新的挑战。本文在 研究标准粒子群优化算法的基础上,针 对 配 电 网 中 DG 的 选址定容问题,建立了包括有功率损耗、电压质量及接入 DG 的总容量为目标函数的数学模型,基于多目标粒子群算法分布式电源选址定容规划研究,用Matlab解决之。
1.1 功率损耗
电能在从发电端传输到负载端的过程中,输电线路上产生的电能损耗不可址 见,只议r地减小有功功率损耗,提理地配置配电网中的 DG,可以有效地减小有功功率损耗,提高发电利用率,节约能量。基于有功功率损耗的目标函数最优数学表达式为:
1.2 电压质量
某些状况下,电力系统在遭受干扰后的几秒或几分钟内,系统中的某些母线电压可能经历大幅度﹑持续性降低,从而使得系统的完整性遭到破坏,功率不能正常地传送给用户。这种灾变称为系统电压不稳定﹐其灾难后果则是电压崩溃。通常用静态电压稳定指标来表示系统电压稳定性。配电网中电
压质量受配电系统的电压稳定性影呵。今乂术用能T网P电压基于期望电压的方差来描述电压质量。基于电压质量的目标函数最优数学表达式为:

1.3 DG总容量
在实际应用中不仅要考虑改善电网带来的经济效应,还需要考虑DG安装、运行和维护的成本费用问题。本文中不涉及经济模型,仅考虑接入配电网的DG总容量。基于DG总容量的目标函数最优数学表达式为:
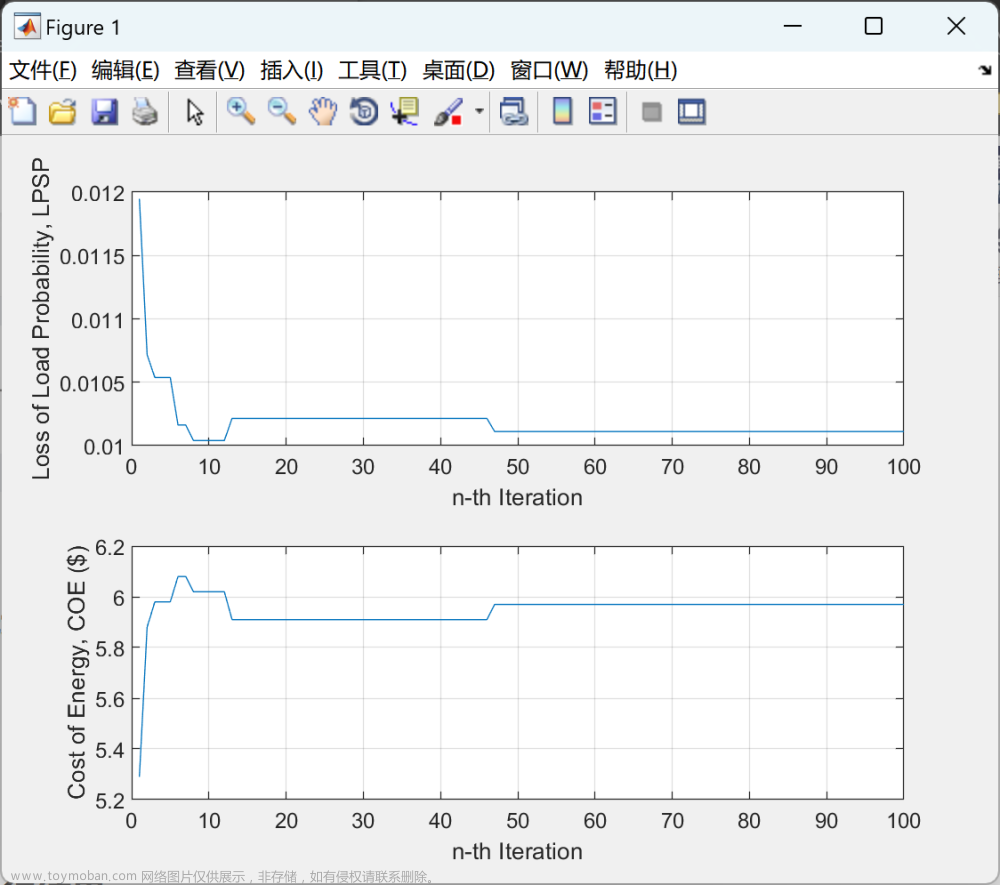
📚2 运行结果

🌈3 Matlab代码实现
部分代码:
%% 雅可比矩阵
J=[jpt jpv; jqt jqv];
X = (inv(J))*M;%偏差
%% 相位偏差
dTh = X(1:nbus-1);
%% 电压偏差
dV = X(nbus:end);
[e1,d1,n1]=eig(JR);%计算矩阵A的特征值和特征向量的函数是eig(A)[V,D,W] = eig(A),[V,D,W] = eig(A)返回满矩阵 W,其列是对应的左特征向量,使得 W’A = DW’。
%diag(A),若A是一个矩阵,则diag函数的作用是产生提取矩阵的对角线;若a是一个向量,则diag函数的作用是产生一个对角线为a的矩阵
%% 目标2 电压稳定性
f2val=max(1./diag((d1)))*max(abs(dQ));%目标2,稳定性
del(2:nbus) = dTh + del(2:nbus);
k = 1;
for i = 2:nbus
if type(i) == 3
V(i) = dV(k) + V(i);
k = k+1;
end
end
%% 目标2和目标3
tval=sum(1./diag((d1)));
po_val=flow_cal(nbus,V,del,BMva);
f1val=sum(po_val);%各支路网损和
f3val=sum(datain(5:8));%DG容量和
fout=[f1val; f2val; f3val];
for i = 1 : N
% Number of individuals that dominate this individual
individual(i).n = 0;
% Individuals which this individual dominate
individual(i).p = [];
for j = 1 : N
dom_less = 0;
dom_equal = 0;
dom_more = 0;
for k = 1 : M
if (x(i,V + k) < x(j,V + k))
dom_less = dom_less + 1;
elseif (x(i,V + k) == x(j,V + k))
dom_equal = dom_equal + 1;
else
dom_more = dom_more + 1;
end
end
if dom_less == 0 && dom_equal ~= M %大于等于的情况
individual(i).n = individual(i).n + 1;
elseif dom_more == 0 && dom_equal ~= M %小于等于的情况
individual(i).p = [individual(i).p j];
end
end
if individual(i).n == 0
x(i,M + V + 1) = 1;
F(front).f = [F(front).f i];
end
end
% Find the subsequent fronts
while ~isempty(F(front).f)
Q = [];
for i = 1 : length(F(front).f)
if ~isempty(individual(F(front).f(i)).p)
for j = 1 : length(individual(F(front).f(i)).p)
individual(individual(F(front).f(i)).p(j)).n = ...
individual(individual(F(front).f(i)).p(j)).n - 1;
if individual(individual(F(front).f(i)).p(j)).n == 0
x(individual(F(front).f(i)).p(j),M + V + 1) = ...
front + 1;
Q = [Q individual(F(front).f(i)).p(j)];
end
end
end
end
front = front + 1;
F(front).f = Q;
end
[temp,index_of_fronts] = sort(x(:,M + V + 1));
for i = 1 : length(index_of_fronts)
sorted_based_on_front(i,:) = x(index_of_fronts(i),:);
end
current_index = 0;
%% Crowding distance
%The crowing distance is calculated as below
% ?For each front Fi, n is the number of individuals.
% ?initialize the distance to be zero for all the individuals i.e. Fi(dj ) = 0,
% where j corresponds to the jth individual in front Fi.
% ?for each objective function m
% * Sort the individuals in front Fi based on objective m i.e. I =
% sort(Fi,m).
% * Assign infinite distance to boundary values for each individual
% in Fi i.e. I(d1) = ? and I(dn) = ?
% * for k = 2 to (n ? 1)
% ?I(dk) = I(dk) + (I(k + 1).m ? I(k ? 1).m)/fmax(m) - fmin(m)
% ?I(k).m is the value of the mth objective function of the kth
% individual in I
% Find the crowding distance for each individual in each front
for front = 1 : (length(F) - 1)
% objective = [];
distance = 0;
y = [];
previous_index = current_index + 1;
for i = 1 : length(F(front).f)
y(i,:) = sorted_based_on_front(current_index + i,:);
end
current_index = current_index + i;
% Sort each individual based on the objective
sorted_based_on_objective = [];
for i = 1 : M
[sorted_based_on_objective, index_of_objectives] = ...
sort(y(:,V + i));
sorted_based_on_objective = [];
for j = 1 : length(index_of_objectives)
sorted_based_on_objective(j,:) = y(index_of_objectives(j),:);
end
f_max = ...
sorted_based_on_objective(length(index_of_objectives), V + i);
f_min = sorted_based_on_objective(1, V + i);
y(index_of_objectives(length(index_of_objectives)),M + V + 1 + i)...
= Inf;
y(index_of_objectives(1),M + V + 1 + i) = Inf;
for j = 2 : length(index_of_objectives) - 1
next_obj = sorted_based_on_objective(j + 1,V + i);
previous_obj = sorted_based_on_objective(j - 1,V + i);
if (f_max - f_min == 0)
y(index_of_objectives(j),M + V + 1 + i) = Inf;
else
y(index_of_objectives(j),M + V + 1 + i) = ...
(next_obj - previous_obj)/(f_max - f_min);
end
end
end
distance = [];
distance(:,1) = zeros(length(F(front).f),1);
for i = 1 : M
distance(:,1) = distance(:,1) + y(:,M + V + 1 + i);
end
y(:,M + V + 2) = distance;
y = y(:,1 : M + V + 2);
z(previous_index:current_index,:) = y;
end
f = z();
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]周洋,许维胜,王宁,邵炜晖.基于改进粒子群算法的多目标分布式电源选址定容规划[J].计算机科学,2015,42(S2):16-18+31.
[2]冯元元. 基于多目标规划的分布式发电选址定容研究[D].华北电力大学,2015. 文章来源:https://www.toymoban.com/news/detail-617893.html
[3]杨智君. 基于群智能算法的分布式电源选址与定容[D].太原科技大学,2019.DOI:10.27721/d.cnki.gyzjc.2019.000065.文章来源地址https://www.toymoban.com/news/detail-617893.html
到了这里,关于【分布式能源的选址与定容】基于多目标粒子群算法分布式电源选址定容规划研究(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


(Matlab代码实现)](https://imgs.yssmx.com/Uploads/2024/02/628119-1.png)