学习前言
用了很久的Stable Diffusion,但从来没有好好解析过它内部的结构,写个博客记录一下,嘿嘿。
源码下载地址
https://github.com/bubbliiiing/stable-diffusion
喜欢的可以点个star噢。
网络构建
一、什么是Stable Diffusion(SD)
Stable Diffusion是比较新的一个扩散模型,翻译过来是稳定扩散,虽然名字叫稳定扩散,但实际上换个seed生成的结果就完全不一样,非常不稳定哈。
Stable Diffusion最开始的应用应该是文本生成图像,即文生图,随着技术的发展Stable Diffusion不仅支持image2image图生图的生成,还支持ControlNet等各种控制方法来定制生成的图像。
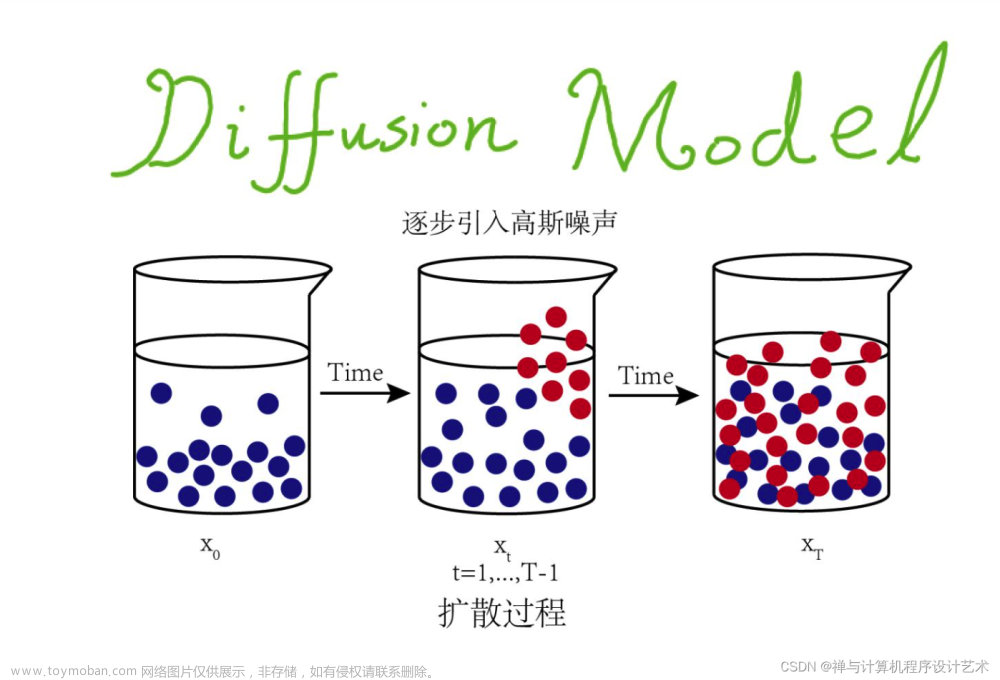
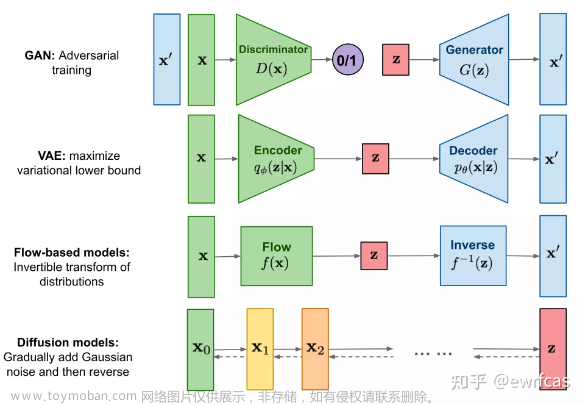
Stable Diffusion基于扩散模型,所以不免包含不断去噪的过程,如果是图生图的话,还有不断加噪的过程,此时离不开DDPM那张老图,如下:
Stable Diffusion相比于DDPM,使用了DDIM采样器,使用了隐空间的扩散,另外使用了非常大的LAION-5B数据集进行预训练。
直接Finetune Stable Diffusion大多数同学应该是无法cover住成本的,不过Stable Diffusion有很多轻量Finetune的方案,比如Lora、Textual Inversion等,但这是后话。
本文主要是解析一下整个SD模型的结构组成,一次扩散,多次扩散的流程。
大模型、AIGC是当前行业的趋势,不会的话容易被淘汰,hh。
txt2img的原理如博文
Diffusion扩散模型学习2——Stable Diffusion结构解析-以文本生成图像(txt2img)为例
所示。
二、Stable Diffusion的组成
Stable Diffusion由四大部分组成。
1、Sampler采样器。
2、Variational Autoencoder (VAE) 变分自编码器。
3、UNet 主网络,噪声预测器。
4、CLIPEmbedder文本编码器。
每一部分都很重要,我们以图像生成图像为例进行解析。既然是图像生成图像,那么我们的输入有两个,一个是文本,另外一个是图片。
三、img2img生成流程
生成流程分为四个部分:
1、对图片进行VAE编码,根据denoise数值进行加噪声。
2、Prompt文本编码。
3、根据denoise数值进行若干次采样。
4、使用VAE进行解码。
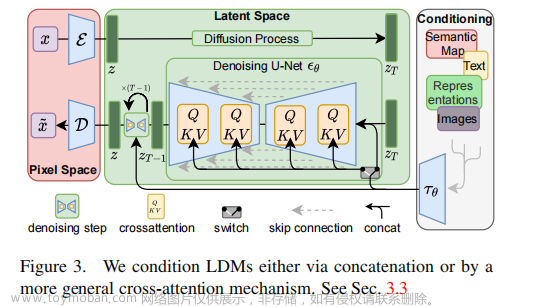
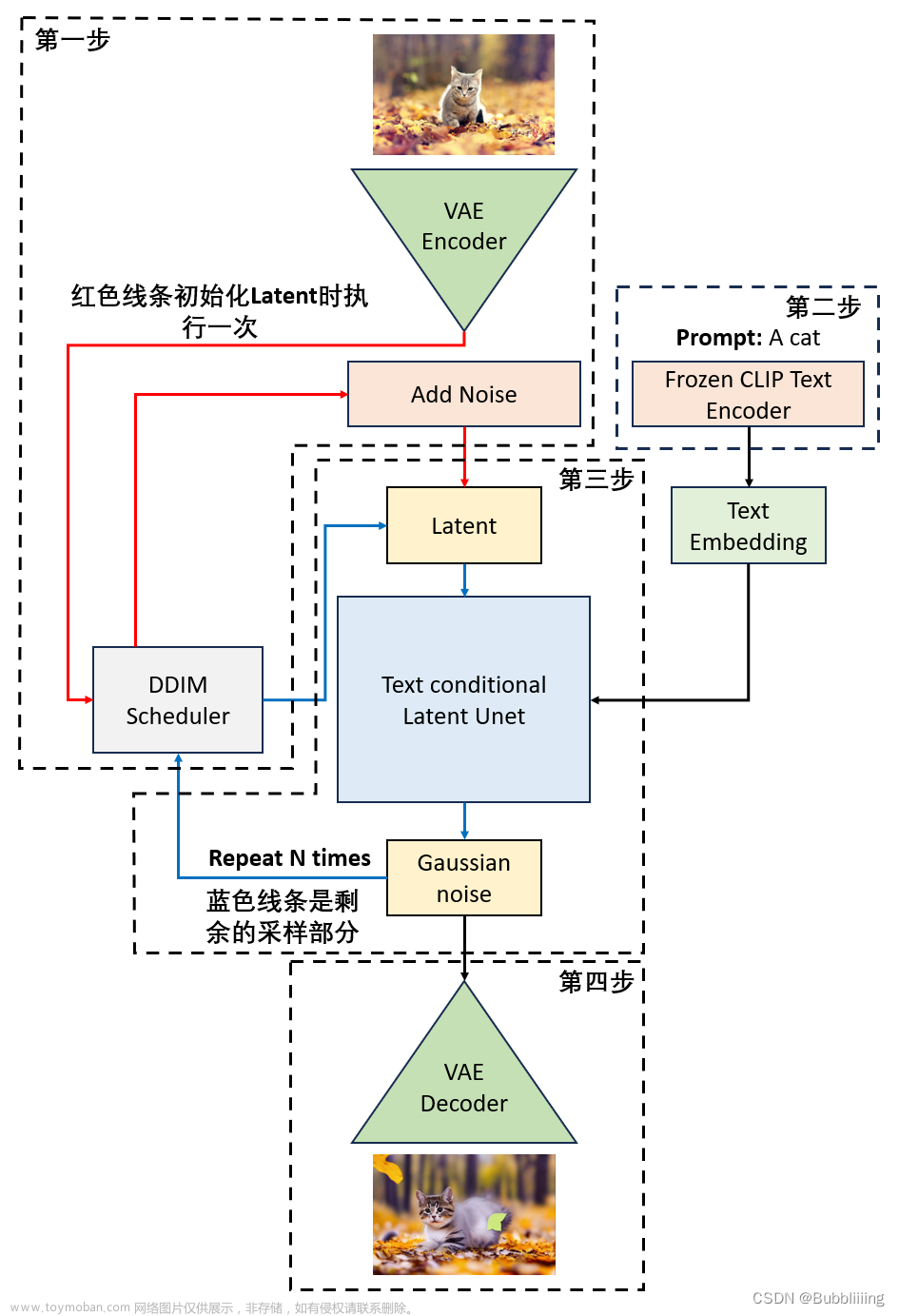
相比于文生图,图生图的输入发生了变化,不再以Gaussian noise作为初始化,而是以加噪后的图像特征为初始化,这样便以图像的方式为模型注入了信息。
详细来讲,如上图所示:
- 第一步为对输入的图像利用VAE编码,获得输入图像的Latent特征;然后使用该Latent特征基于DDIM Sampler进行加噪,此时获得输入图片加噪后的特征。假设我们设置denoise数值为0.8,总步数为20步,那么第一步中,我们会对输入图片进行0.8x20次的加噪声,剩下4步不加,可理解为打乱了80%的特征,保留20%的特征。
- 第二步是对输入的文本进行编码,获得文本特征;
- 第三步是根据denoise数值对 第一步中获得的 加噪后的特征 进行若干次采样。还是以第一步中denoise数值为0.8为例,我们只加了0.8x20次噪声,那么我们也只需要进行0.8x20次采样就可以恢复出图片了。
- 第四步是将采样后的图片利用VAE的Decoder进行恢复。
with torch.no_grad():
if seed == -1:
seed = random.randint(0, 65535)
seed_everything(seed)
# ----------------------- #
# 对输入图片进行编码并加噪
# ----------------------- #
if image_path is not None:
img = HWC3(np.array(img, np.uint8))
img = torch.from_numpy(img.copy()).float().cuda() / 127.0 - 1.0
img = torch.stack([img for _ in range(num_samples)], dim=0)
img = einops.rearrange(img, 'b h w c -> b c h w').clone()
ddim_sampler.make_schedule(ddim_steps, ddim_eta=eta, verbose=True)
t_enc = min(int(denoise_strength * ddim_steps), ddim_steps - 1)
z = model.get_first_stage_encoding(model.encode_first_stage(img))
z_enc = ddim_sampler.stochastic_encode(z, torch.tensor([t_enc] * num_samples).to(model.device))
# ----------------------- #
# 获得编码后的prompt
# ----------------------- #
cond = {"c_crossattn": [model.get_learned_conditioning([prompt + ', ' + a_prompt] * num_samples)]}
un_cond = {"c_crossattn": [model.get_learned_conditioning([n_prompt] * num_samples)]}
H, W = input_shape
shape = (4, H // 8, W // 8)
if image_path is not None:
samples = ddim_sampler.decode(z_enc, cond, t_enc, unconditional_guidance_scale=scale, unconditional_conditioning=un_cond)
else:
# ----------------------- #
# 进行采样
# ----------------------- #
samples, intermediates = ddim_sampler.sample(ddim_steps, num_samples,
shape, cond, verbose=False, eta=eta,
unconditional_guidance_scale=scale,
unconditional_conditioning=un_cond)
# ----------------------- #
# 进行解码
# ----------------------- #
x_samples = model.decode_first_stage(samples)
x_samples = (einops.rearrange(x_samples, 'b c h w -> b h w c') * 127.5 + 127.5).cpu().numpy().clip(0, 255).astype(np.uint8)
1、输入图片编码
在图生图中,我们首先要指定一张参考的图像,然后在这个参考图像上开始工作:
1、利用VAE编码器对这张参考图像进行编码,使其进入隐空间,只有进入了隐空间,网络才知道这个图像是什么;
2、然后使用该Latent特征基于DDIM Sampler进行加噪,此时获得输入图片加噪后的特征。加噪的逻辑如下:
- denoise可认为是重建的比例,1代表全部重建,0代表不重建;
- 假设我们设置denoise数值为0.8,总步数为20步;我们会对输入图片进行0.8x20次的加噪声,剩下4步不加,可理解为80%的特征,保留20%的特征;不过就算加完20步噪声,原始输入图片的信息还是有一点保留的,不是完全不保留。
此时我们便获得在隐空间加噪后的图像,后续会在这个 隐空间加噪后的图像 的基础上进行采样。
with torch.no_grad():
if seed == -1:
seed = random.randint(0, 65535)
seed_everything(seed)
# ----------------------- #
# 对输入图片进行编码并加噪
# ----------------------- #
if image_path is not None:
img = HWC3(np.array(img, np.uint8))
img = torch.from_numpy(img.copy()).float().cuda() / 127.0 - 1.0
img = torch.stack([img for _ in range(num_samples)], dim=0)
img = einops.rearrange(img, 'b h w c -> b c h w').clone()
ddim_sampler.make_schedule(ddim_steps, ddim_eta=eta, verbose=True)
t_enc = min(int(denoise_strength * ddim_steps), ddim_steps - 1)
z = model.get_first_stage_encoding(model.encode_first_stage(img))
z_enc = ddim_sampler.stochastic_encode(z, torch.tensor([t_enc] * num_samples).to(model.device))
2、文本编码
文本编码的思路比较简单,直接使用CLIP的文本编码器进行编码就可以了,在代码中定义了一个FrozenCLIPEmbedder类别,使用了transformers库的CLIPTokenizer和CLIPTextModel。
在前传过程中,我们对输入进来的文本首先利用CLIPTokenizer进行编码,然后使用CLIPTextModel进行特征提取,通过FrozenCLIPEmbedder,我们可以获得一个[batch_size, 77, 768]的特征向量。
class FrozenCLIPEmbedder(AbstractEncoder):
"""Uses the CLIP transformer encoder for text (from huggingface)"""
LAYERS = [
"last",
"pooled",
"hidden"
]
def __init__(self, version="openai/clip-vit-large-patch14", device="cuda", max_length=77,
freeze=True, layer="last", layer_idx=None): # clip-vit-base-patch32
super().__init__()
assert layer in self.LAYERS
# 定义文本的tokenizer和transformer
self.tokenizer = CLIPTokenizer.from_pretrained(version)
self.transformer = CLIPTextModel.from_pretrained(version)
self.device = device
self.max_length = max_length
# 冻结模型参数
if freeze:
self.freeze()
self.layer = layer
self.layer_idx = layer_idx
if layer == "hidden":
assert layer_idx is not None
assert 0 <= abs(layer_idx) <= 12
def freeze(self):
self.transformer = self.transformer.eval()
# self.train = disabled_train
for param in self.parameters():
param.requires_grad = False
def forward(self, text):
# 对输入的图片进行分词并编码,padding直接padding到77的长度。
batch_encoding = self.tokenizer(text, truncation=True, max_length=self.max_length, return_length=True,
return_overflowing_tokens=False, padding="max_length", return_tensors="pt")
# 拿出input_ids然后传入transformer进行特征提取。
tokens = batch_encoding["input_ids"].to(self.device)
outputs = self.transformer(input_ids=tokens, output_hidden_states=self.layer=="hidden")
# 取出所有的token
if self.layer == "last":
z = outputs.last_hidden_state
elif self.layer == "pooled":
z = outputs.pooler_output[:, None, :]
else:
z = outputs.hidden_states[self.layer_idx]
return z
def encode(self, text):
return self(text)
3、采样流程
a、生成初始噪声
在图生图中,我们的初始噪声获取于参考图片,所以参考第一步就可以获得图生图的噪声
b、对噪声进行N次采样
既然Stable Diffusion是一个不断扩散的过程,那么少不了不断的去噪声,那么怎么去噪声便是一个问题。
在上一步中,我们已经获得了一个图生图的噪声,它是一个符合正态分布的向量,我们便从它开始去噪声。
我们会对ddim_timesteps的时间步取反,因为我们现在是去噪声而非加噪声,然后对其进行一个循环,由于我们此时不再是txt2img中的采样流程,我们使用sampler的另外一个方法decode,循环的代码如下:
@torch.no_grad()
def decode(self, x_latent, cond, t_start, unconditional_guidance_scale=1.0, unconditional_conditioning=None,
use_original_steps=False):
# 使用ddim的时间步
# 这里内容看起来很多,但是其实很少,本质上就是取了self.ddim_timesteps,然后把它reversed一下
timesteps = np.arange(self.ddpm_num_timesteps) if use_original_steps else self.ddim_timesteps
timesteps = timesteps[:t_start]
time_range = np.flip(timesteps)
total_steps = timesteps.shape[0]
print(f"Running DDIM Sampling with {total_steps} timesteps")
iterator = tqdm(time_range, desc='Decoding image', total=total_steps)
x_dec = x_latent
for i, step in enumerate(iterator):
index = total_steps - i - 1
ts = torch.full((x_latent.shape[0],), step, device=x_latent.device, dtype=torch.long)
# 进行单次采样
x_dec, _ = self.p_sample_ddim(x_dec, cond, ts, index=index, use_original_steps=use_original_steps,
unconditional_guidance_scale=unconditional_guidance_scale,
unconditional_conditioning=unconditional_conditioning)
return x_dec
c、单次采样解析
I、预测噪声
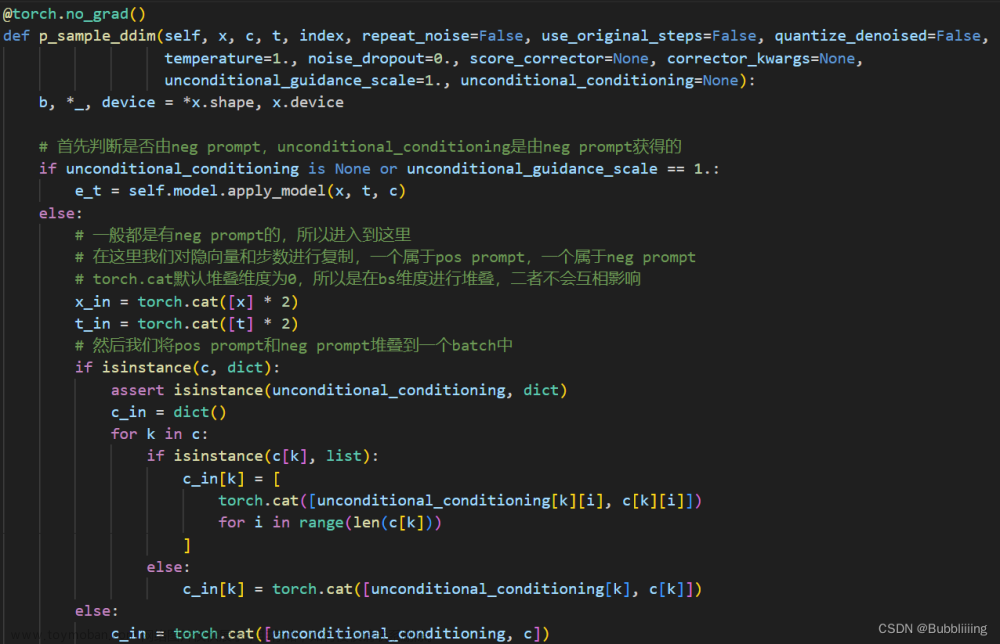
在进行单词采样前,需要首先判断是否有neg prompt,如果有,我们需要同时处理neg prompt,否则仅仅需要处理pos prompt。实际使用的时候一般都有neg prompt(效果会好一些),所以默认进入对应的处理过程。
在处理neg prompt时,我们对输入进来的隐向量和步数进行复制,一个属于pos prompt,一个属于neg prompt。torch.cat默认堆叠维度为0,所以是在batch_size维度进行堆叠,二者不会互相影响。然后我们将pos prompt和neg prompt堆叠到一个batch中,也是在batch_size维度堆叠。
# 首先判断是否由neg prompt,unconditional_conditioning是由neg prompt获得的
if unconditional_conditioning is None or unconditional_guidance_scale == 1.:
e_t = self.model.apply_model(x, t, c)
else:
# 一般都是有neg prompt的,所以进入到这里
# 在这里我们对隐向量和步数进行复制,一个属于pos prompt,一个属于neg prompt
# torch.cat默认堆叠维度为0,所以是在bs维度进行堆叠,二者不会互相影响
x_in = torch.cat([x] * 2)
t_in = torch.cat([t] * 2)
# 然后我们将pos prompt和neg prompt堆叠到一个batch中
if isinstance(c, dict):
assert isinstance(unconditional_conditioning, dict)
c_in = dict()
for k in c:
if isinstance(c[k], list):
c_in[k] = [
torch.cat([unconditional_conditioning[k][i], c[k][i]])
for i in range(len(c[k]))
]
else:
c_in[k] = torch.cat([unconditional_conditioning[k], c[k]])
else:
c_in = torch.cat([unconditional_conditioning, c])
堆叠完后,我们将隐向量、步数和prompt条件一起传入网络中,将结果在bs维度进行使用chunk进行分割。
因为我们在堆叠时,neg prompt放在了前面。因此分割好后,前半部分e_t_uncond属于利用neg prompt得到的,后半部分e_t属于利用pos prompt得到的,我们本质上应该扩大pos prompt的影响,远离neg prompt的影响。因此,我们使用e_t-e_t_uncond计算二者的距离,使用scale扩大二者的距离。在e_t_uncond基础上,得到最后的隐向量。
# 堆叠完后,隐向量、步数和prompt条件一起传入网络中,将结果在bs维度进行使用chunk进行分割
e_t_uncond, e_t = self.model.apply_model(x_in, t_in, c_in).chunk(2)
e_t = e_t_uncond + unconditional_guidance_scale * (e_t - e_t_uncond)

此时获得的e_t就是通过隐向量和prompt共同获得的预测噪声啦。
II、施加噪声
获得噪声就OK了吗?显然不是的,我们还要将获得的新噪声,按照一定的比例添加到原来的原始噪声上。
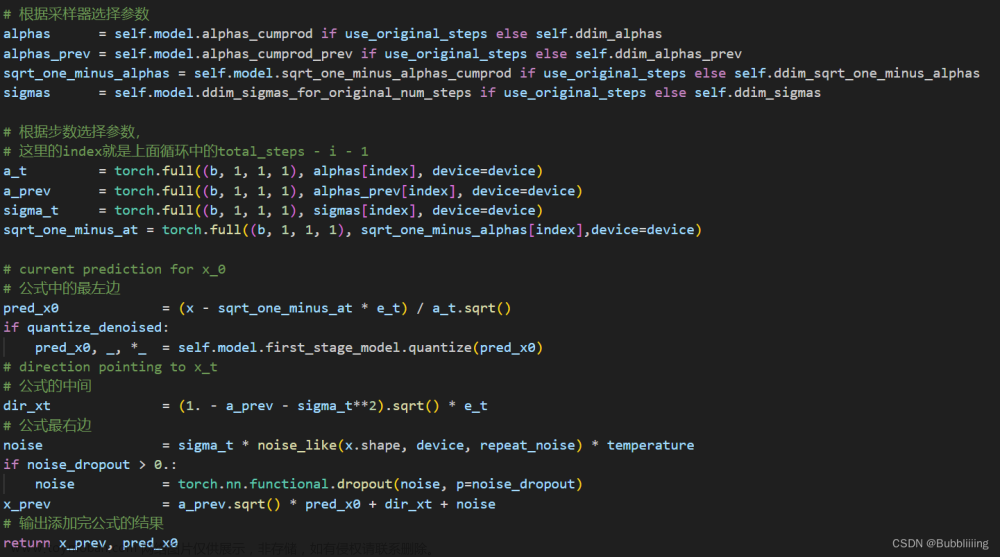
这个地方我们最好结合ddim中的公式来看,我们需要获得
α
ˉ
t
\bar{\alpha}_t
αˉt、
α
ˉ
t
−
1
\bar{\alpha}_{t-1}
αˉt−1、
σ
t
\sigma_t
σt、
1
−
α
ˉ
t
\sqrt{1-\bar{\alpha}_t}
1−αˉt。

代码中,我们其实已经预先计算好了这些参数。我们只需要直接取出即可,下方的a_t也就是公式中括号外的
α
ˉ
t
\bar{\alpha}_t
αˉt,a_prev 就是公式中的
α
ˉ
t
−
1
\bar{\alpha}_{t-1}
αˉt−1,sigma_t就是公式中的
σ
t
\sigma_t
σt,sqrt_one_minus_at就是公式中的
1
−
α
ˉ
t
\sqrt{1-\bar{\alpha}_t}
1−αˉt。
# 根据采样器选择参数
alphas = self.model.alphas_cumprod if use_original_steps else self.ddim_alphas
alphas_prev = self.model.alphas_cumprod_prev if use_original_steps else self.ddim_alphas_prev
sqrt_one_minus_alphas = self.model.sqrt_one_minus_alphas_cumprod if use_original_steps else self.ddim_sqrt_one_minus_alphas
sigmas = self.model.ddim_sigmas_for_original_num_steps if use_original_steps else self.ddim_sigmas
# 根据步数选择参数,
# 这里的index就是上面循环中的total_steps - i - 1
a_t = torch.full((b, 1, 1, 1), alphas[index], device=device)
a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)
sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)
sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)
其实这一步我们只是把公式需要用到的系数全都拿了出来,方便后面的加减乘除。然后我们便在代码中实现上述的公式。
# current prediction for x_0
# 公式中的最左边
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()
if quantize_denoised:
pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)
# direction pointing to x_t
# 公式的中间
dir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_t
# 公式最右边
noise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperature
if noise_dropout > 0.:
noise = torch.nn.functional.dropout(noise, p=noise_dropout)
x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noise
# 输出添加完公式的结果
return x_prev, pred_x0
d、预测噪声过程中的网络结构解析
I、apply_model方法解析
在3.a的预测噪声过程中,我们使用了model.apply_model方法进行噪声的预测,这个方法具体做了什么被隐掉了,我们看看具体做的工作。
apply_model方法在ldm.models.diffusion.ddpm.py文件中。在apply_model中,我们将x_noisy传入self.model中预测噪声。
x_recon = self.model(x_noisy, t, **cond)
self.model是一个预先构建好的类,定义在ldm.models.diffusion.ddpm.py文件的1416行,内部包含Stable Diffusion的Unet网络,self.model的功能有点类似于包装器,根据模型选择的特征融合方式,进行文本与上文生成的噪声的融合。
c_concat代表使用堆叠的方式进行融合,c_crossattn代表使用attention的方式融合。
class DiffusionWrapper(pl.LightningModule):
def __init__(self, diff_model_config, conditioning_key):
super().__init__()
self.sequential_cross_attn = diff_model_config.pop("sequential_crossattn", False)
# stable diffusion的unet网络
self.diffusion_model = instantiate_from_config(diff_model_config)
self.conditioning_key = conditioning_key
assert self.conditioning_key in [None, 'concat', 'crossattn', 'hybrid', 'adm', 'hybrid-adm', 'crossattn-adm']
def forward(self, x, t, c_concat: list = None, c_crossattn: list = None, c_adm=None):
if self.conditioning_key is None:
out = self.diffusion_model(x, t)
elif self.conditioning_key == 'concat':
xc = torch.cat([x] + c_concat, dim=1)
out = self.diffusion_model(xc, t)
elif self.conditioning_key == 'crossattn':
if not self.sequential_cross_attn:
cc = torch.cat(c_crossattn, 1)
else:
cc = c_crossattn
out = self.diffusion_model(x, t, context=cc)
elif self.conditioning_key == 'hybrid':
xc = torch.cat([x] + c_concat, dim=1)
cc = torch.cat(c_crossattn, 1)
out = self.diffusion_model(xc, t, context=cc)
elif self.conditioning_key == 'hybrid-adm':
assert c_adm is not None
xc = torch.cat([x] + c_concat, dim=1)
cc = torch.cat(c_crossattn, 1)
out = self.diffusion_model(xc, t, context=cc, y=c_adm)
elif self.conditioning_key == 'crossattn-adm':
assert c_adm is not None
cc = torch.cat(c_crossattn, 1)
out = self.diffusion_model(x, t, context=cc, y=c_adm)
elif self.conditioning_key == 'adm':
cc = c_crossattn[0]
out = self.diffusion_model(x, t, y=cc)
else:
raise NotImplementedError()
return out
代码中的self.diffusion_model便是Stable Diffusion的Unet网络,网络结构位于ldm.modules.diffusionmodules.openaimodel.py文件中的UNetModel类。
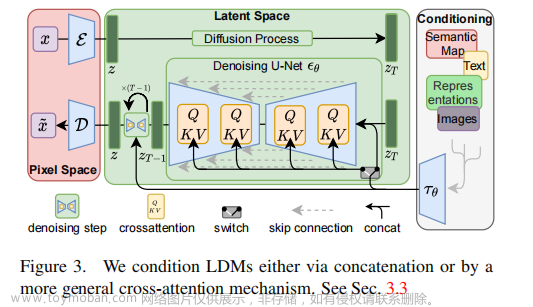
II、UNetModel模型解析
UNetModel主要做的工作是结合时间步t和文本Embedding计算这一时刻的噪声。尽管UNet的思路非常简单,但是在StableDiffusion中,UNetModel由ResBlock和Transformer模块组成,整体来讲相比于普通的UNet复杂一些。
Prompt通过Frozen CLIP Text Encoder获得Text Embedding,Timesteps通过全连接(MLP)获得Timesteps Embedding;
ResBlock用于结合时间步Timesteps Embedding,Transformer模块用于结合文本Text Embedding。
我在这里放一张大图,同学们可以看到内部shape的变化。
Unet代码如下所示:
class UNetModel(nn.Module):
"""
The full UNet model with attention and timestep embedding.
:param in_channels: channels in the input Tensor.
:param model_channels: base channel count for the model.
:param out_channels: channels in the output Tensor.
:param num_res_blocks: number of residual blocks per downsample.
:param attention_resolutions: a collection of downsample rates at which
attention will take place. May be a set, list, or tuple.
For example, if this contains 4, then at 4x downsampling, attention
will be used.
:param dropout: the dropout probability.
:param channel_mult: channel multiplier for each level of the UNet.
:param conv_resample: if True, use learned convolutions for upsampling and
downsampling.
:param dims: determines if the signal is 1D, 2D, or 3D.
:param num_classes: if specified (as an int), then this model will be
class-conditional with `num_classes` classes.
:param use_checkpoint: use gradient checkpointing to reduce memory usage.
:param num_heads: the number of attention heads in each attention layer.
:param num_heads_channels: if specified, ignore num_heads and instead use
a fixed channel width per attention head.
:param num_heads_upsample: works with num_heads to set a different number
of heads for upsampling. Deprecated.
:param use_scale_shift_norm: use a FiLM-like conditioning mechanism.
:param resblock_updown: use residual blocks for up/downsampling.
:param use_new_attention_order: use a different attention pattern for potentially
increased efficiency.
"""
def __init__(
self,
image_size,
in_channels,
model_channels,
out_channels,
num_res_blocks,
attention_resolutions,
dropout=0,
channel_mult=(1, 2, 4, 8),
conv_resample=True,
dims=2,
num_classes=None,
use_checkpoint=False,
use_fp16=False,
num_heads=-1,
num_head_channels=-1,
num_heads_upsample=-1,
use_scale_shift_norm=False,
resblock_updown=False,
use_new_attention_order=False,
use_spatial_transformer=False, # custom transformer support
transformer_depth=1, # custom transformer support
context_dim=None, # custom transformer support
n_embed=None, # custom support for prediction of discrete ids into codebook of first stage vq model
legacy=True,
):
super().__init__()
if use_spatial_transformer:
assert context_dim is not None, 'Fool!! You forgot to include the dimension of your cross-attention conditioning...'
if context_dim is not None:
assert use_spatial_transformer, 'Fool!! You forgot to use the spatial transformer for your cross-attention conditioning...'
from omegaconf.listconfig import ListConfig
if type(context_dim) == ListConfig:
context_dim = list(context_dim)
if num_heads_upsample == -1:
num_heads_upsample = num_heads
if num_heads == -1:
assert num_head_channels != -1, 'Either num_heads or num_head_channels has to be set'
if num_head_channels == -1:
assert num_heads != -1, 'Either num_heads or num_head_channels has to be set'
self.image_size = image_size
self.in_channels = in_channels
self.model_channels = model_channels
self.out_channels = out_channels
self.num_res_blocks = num_res_blocks
self.attention_resolutions = attention_resolutions
self.dropout = dropout
self.channel_mult = channel_mult
self.conv_resample = conv_resample
self.num_classes = num_classes
self.use_checkpoint = use_checkpoint
self.dtype = th.float16 if use_fp16 else th.float32
self.num_heads = num_heads
self.num_head_channels = num_head_channels
self.num_heads_upsample = num_heads_upsample
self.predict_codebook_ids = n_embed is not None
# 用于计算当前采样时间t的embedding
time_embed_dim = model_channels * 4
self.time_embed = nn.Sequential(
linear(model_channels, time_embed_dim),
nn.SiLU(),
linear(time_embed_dim, time_embed_dim),
)
if self.num_classes is not None:
self.label_emb = nn.Embedding(num_classes, time_embed_dim)
# 定义输入模块的第一个卷积
# TimestepEmbedSequential也可以看作一个包装器,根据层的种类进行时间或者文本的融合。
self.input_blocks = nn.ModuleList(
[
TimestepEmbedSequential(
conv_nd(dims, in_channels, model_channels, 3, padding=1)
)
]
)
self._feature_size = model_channels
input_block_chans = [model_channels]
ch = model_channels
ds = 1
# 对channel_mult进行循环,channel_mult一共有四个值,代表unet四个部分通道的扩张比例
# [1, 2, 4, 4]
for level, mult in enumerate(channel_mult):
# 每个部分循环两次
# 添加一个ResBlock和一个AttentionBlock
for _ in range(num_res_blocks):
# 先添加一个ResBlock
# 用于对输入的噪声进行通道数的调整,并且融合t的特征
layers = [
ResBlock(
ch,
time_embed_dim,
dropout,
out_channels=mult * model_channels,
dims=dims,
use_checkpoint=use_checkpoint,
use_scale_shift_norm=use_scale_shift_norm,
)
]
# ch便是上述ResBlock的输出通道数
ch = mult * model_channels
if ds in attention_resolutions:
# num_heads=8
if num_head_channels == -1:
dim_head = ch // num_heads
else:
num_heads = ch // num_head_channels
dim_head = num_head_channels
if legacy:
#num_heads = 1
dim_head = ch // num_heads if use_spatial_transformer else num_head_channels
# 使用了SpatialTransformer自注意力,加强全局特征,融合文本的特征
layers.append(
AttentionBlock(
ch,
use_checkpoint=use_checkpoint,
num_heads=num_heads,
num_head_channels=dim_head,
use_new_attention_order=use_new_attention_order,
) if not use_spatial_transformer else SpatialTransformer(
ch, num_heads, dim_head, depth=transformer_depth, context_dim=context_dim
)
)
self.input_blocks.append(TimestepEmbedSequential(*layers))
self._feature_size += ch
input_block_chans.append(ch)
# 如果不是四个部分中的最后一个部分,那么都要进行下采样。
if level != len(channel_mult) - 1:
out_ch = ch
# 在此处进行下采样
# 一般直接使用Downsample模块
self.input_blocks.append(
TimestepEmbedSequential(
ResBlock(
ch,
time_embed_dim,
dropout,
out_channels=out_ch,
dims=dims,
use_checkpoint=use_checkpoint,
use_scale_shift_norm=use_scale_shift_norm,
down=True,
)
if resblock_updown
else Downsample(
ch, conv_resample, dims=dims, out_channels=out_ch
)
)
)
# 为下一阶段定义参数。
ch = out_ch
input_block_chans.append(ch)
ds *= 2
self._feature_size += ch
if num_head_channels == -1:
dim_head = ch // num_heads
else:
num_heads = ch // num_head_channels
dim_head = num_head_channels
if legacy:
#num_heads = 1
dim_head = ch // num_heads if use_spatial_transformer else num_head_channels
# 定义中间层
# ResBlock + SpatialTransformer + ResBlock
self.middle_block = TimestepEmbedSequential(
ResBlock(
ch,
time_embed_dim,
dropout,
dims=dims,
use_checkpoint=use_checkpoint,
use_scale_shift_norm=use_scale_shift_norm,
),
AttentionBlock(
ch,
use_checkpoint=use_checkpoint,
num_heads=num_heads,
num_head_channels=dim_head,
use_new_attention_order=use_new_attention_order,
) if not use_spatial_transformer else SpatialTransformer(
ch, num_heads, dim_head, depth=transformer_depth, context_dim=context_dim
),
ResBlock(
ch,
time_embed_dim,
dropout,
dims=dims,
use_checkpoint=use_checkpoint,
use_scale_shift_norm=use_scale_shift_norm,
),
)
self._feature_size += ch
# 定义Unet上采样过程
self.output_blocks = nn.ModuleList([])
# 循环把channel_mult反了过来
for level, mult in list(enumerate(channel_mult))[::-1]:
# 上采样时每个部分循环三次
for i in range(num_res_blocks + 1):
ich = input_block_chans.pop()
# 首先添加ResBlock层
layers = [
ResBlock(
ch + ich,
time_embed_dim,
dropout,
out_channels=model_channels * mult,
dims=dims,
use_checkpoint=use_checkpoint,
use_scale_shift_norm=use_scale_shift_norm,
)
]
ch = model_channels * mult
# 然后进行SpatialTransformer自注意力
if ds in attention_resolutions:
if num_head_channels == -1:
dim_head = ch // num_heads
else:
num_heads = ch // num_head_channels
dim_head = num_head_channels
if legacy:
#num_heads = 1
dim_head = ch // num_heads if use_spatial_transformer else num_head_channels
layers.append(
AttentionBlock(
ch,
use_checkpoint=use_checkpoint,
num_heads=num_heads_upsample,
num_head_channels=dim_head,
use_new_attention_order=use_new_attention_order,
) if not use_spatial_transformer else SpatialTransformer(
ch, num_heads, dim_head, depth=transformer_depth, context_dim=context_dim
)
)
# 如果不是channel_mult循环的第一个
# 且
# 是num_res_blocks循环的最后一次,则进行上采样
if level and i == num_res_blocks:
out_ch = ch
layers.append(
ResBlock(
ch,
time_embed_dim,
dropout,
out_channels=out_ch,
dims=dims,
use_checkpoint=use_checkpoint,
use_scale_shift_norm=use_scale_shift_norm,
up=True,
)
if resblock_updown
else Upsample(ch, conv_resample, dims=dims, out_channels=out_ch)
)
ds //= 2
self.output_blocks.append(TimestepEmbedSequential(*layers))
self._feature_size += ch
# 最后在输出部分进行一次卷积
self.out = nn.Sequential(
normalization(ch),
nn.SiLU(),
zero_module(conv_nd(dims, model_channels, out_channels, 3, padding=1)),
)
if self.predict_codebook_ids:
self.id_predictor = nn.Sequential(
normalization(ch),
conv_nd(dims, model_channels, n_embed, 1),
#nn.LogSoftmax(dim=1) # change to cross_entropy and produce non-normalized logits
)
def convert_to_fp16(self):
"""
Convert the torso of the model to float16.
"""
self.input_blocks.apply(convert_module_to_f16)
self.middle_block.apply(convert_module_to_f16)
self.output_blocks.apply(convert_module_to_f16)
def convert_to_fp32(self):
"""
Convert the torso of the model to float32.
"""
self.input_blocks.apply(convert_module_to_f32)
self.middle_block.apply(convert_module_to_f32)
self.output_blocks.apply(convert_module_to_f32)
def forward(self, x, timesteps=None, context=None, y=None,**kwargs):
"""
Apply the model to an input batch.
:param x: an [N x C x ...] Tensor of inputs.
:param timesteps: a 1-D batch of timesteps.
:param context: conditioning plugged in via crossattn
:param y: an [N] Tensor of labels, if class-conditional.
:return: an [N x C x ...] Tensor of outputs.
"""
assert (y is not None) == (
self.num_classes is not None
), "must specify y if and only if the model is class-conditional"
hs = []
# 用于计算当前采样时间t的embedding
t_emb = timestep_embedding(timesteps, self.model_channels, repeat_only=False)
emb = self.time_embed(t_emb)
if self.num_classes is not None:
assert y.shape == (x.shape[0],)
emb = emb + self.label_emb(y)
# 对输入模块进行循环,进行下采样并且融合时间特征与文本特征。
h = x.type(self.dtype)
for module in self.input_blocks:
h = module(h, emb, context)
hs.append(h)
# 中间模块的特征提取
h = self.middle_block(h, emb, context)
# 上采样模块的特征提取
for module in self.output_blocks:
h = th.cat([h, hs.pop()], dim=1)
h = module(h, emb, context)
h = h.type(x.dtype)
# 输出模块
if self.predict_codebook_ids:
return self.id_predictor(h)
else:
return self.out(h)
4、隐空间解码生成图片
通过上述步骤,已经可以多次采样获得结果,然后我们便可以通过隐空间解码生成图片。
隐空间解码生成图片的过程非常简单,将上文多次采样后的结果,使用decode_first_stage方法即可生成图片。
在decode_first_stage方法中,网络调用VAE对获取到的64x64x3的隐向量进行解码,获得512x512x3的图片。文章来源:https://www.toymoban.com/news/detail-617973.html
@torch.no_grad()
def decode_first_stage(self, z, predict_cids=False, force_not_quantize=False):
if predict_cids:
if z.dim() == 4:
z = torch.argmax(z.exp(), dim=1).long()
z = self.first_stage_model.quantize.get_codebook_entry(z, shape=None)
z = rearrange(z, 'b h w c -> b c h w').contiguous()
z = 1. / self.scale_factor * z
# 一般无需分割输入,所以直接将x_noisy传入self.model中,在下面else进行
if hasattr(self, "split_input_params"):
......
else:
if isinstance(self.first_stage_model, VQModelInterface):
return self.first_stage_model.decode(z, force_not_quantize=predict_cids or force_not_quantize)
else:
return self.first_stage_model.decode(z)
图像到图像预测过程代码
整体预测代码如下:文章来源地址https://www.toymoban.com/news/detail-617973.html
import os
import random
import cv2
import einops
import numpy as np
import torch
from PIL import Image
from pytorch_lightning import seed_everything
from ldm_hacked import *
# ----------------------- #
# 使用的参数
# ----------------------- #
# config的地址
config_path = "model_data/sd_v15.yaml"
# 模型的地址
model_path = "model_data/v1-5-pruned-emaonly.safetensors"
# fp16,可以加速与节省显存
sd_fp16 = True
vae_fp16 = True
# ----------------------- #
# 生成图片的参数
# ----------------------- #
# 生成的图像大小为input_shape,对于img2img会进行Centter Crop
input_shape = [512, 512]
# 一次生成几张图像
num_samples = 1
# 采样的步数
ddim_steps = 20
# 采样的种子,为-1的话则随机。
seed = 12345
# eta
eta = 0
# denoise强度,for img2img
denoise_strength = 1.0
# ----------------------- #
# 提示词相关参数
# ----------------------- #
# 提示词
prompt = "a cute cat, with yellow leaf, trees"
# 正面提示词
a_prompt = "best quality, extremely detailed"
# 负面提示词
n_prompt = "longbody, lowres, bad anatomy, bad hands, missing fingers, extra digit, fewer digits, cropped, worst quality, low quality"
# 正负扩大倍数
scale = 9
# img2img使用,如果不想img2img这设置为None。
image_path = None
# ----------------------- #
# 保存路径
# ----------------------- #
save_path = "imgs/outputs_imgs"
# ----------------------- #
# 创建模型
# ----------------------- #
model = create_model(config_path).cpu()
model.load_state_dict(load_state_dict(model_path, location='cuda'), strict=False)
model = model.cuda()
ddim_sampler = DDIMSampler(model)
if sd_fp16:
model = model.half()
if image_path is not None:
img = Image.open(image_path)
img = crop_and_resize(img, input_shape[0], input_shape[1])
with torch.no_grad():
if seed == -1:
seed = random.randint(0, 65535)
seed_everything(seed)
# ----------------------- #
# 对输入图片进行编码并加噪
# ----------------------- #
if image_path is not None:
img = HWC3(np.array(img, np.uint8))
img = torch.from_numpy(img.copy()).float().cuda() / 127.0 - 1.0
img = torch.stack([img for _ in range(num_samples)], dim=0)
img = einops.rearrange(img, 'b h w c -> b c h w').clone()
if vae_fp16:
img = img.half()
model.first_stage_model = model.first_stage_model.half()
else:
model.first_stage_model = model.first_stage_model.float()
ddim_sampler.make_schedule(ddim_steps, ddim_eta=eta, verbose=True)
t_enc = min(int(denoise_strength * ddim_steps), ddim_steps - 1)
z = model.get_first_stage_encoding(model.encode_first_stage(img))
z_enc = ddim_sampler.stochastic_encode(z, torch.tensor([t_enc] * num_samples).to(model.device))
z_enc = z_enc.half() if sd_fp16 else z_enc.float()
# ----------------------- #
# 获得编码后的prompt
# ----------------------- #
cond = {"c_crossattn": [model.get_learned_conditioning([prompt + ', ' + a_prompt] * num_samples)]}
un_cond = {"c_crossattn": [model.get_learned_conditioning([n_prompt] * num_samples)]}
H, W = input_shape
shape = (4, H // 8, W // 8)
if image_path is not None:
samples = ddim_sampler.decode(z_enc, cond, t_enc, unconditional_guidance_scale=scale, unconditional_conditioning=un_cond)
else:
# ----------------------- #
# 进行采样
# ----------------------- #
samples, intermediates = ddim_sampler.sample(ddim_steps, num_samples,
shape, cond, verbose=False, eta=eta,
unconditional_guidance_scale=scale,
unconditional_conditioning=un_cond)
# ----------------------- #
# 进行解码
# ----------------------- #
x_samples = model.decode_first_stage(samples.half() if vae_fp16 else samples.float())
x_samples = (einops.rearrange(x_samples, 'b c h w -> b h w c') * 127.5 + 127.5).cpu().numpy().clip(0, 255).astype(np.uint8)
# ----------------------- #
# 保存图片
# ----------------------- #
if not os.path.exists(save_path):
os.makedirs(save_path)
for index, image in enumerate(x_samples):
cv2.imwrite(os.path.join(save_path, str(index) + ".jpg"), cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
到了这里,关于Diffusion扩散模型学习3——Stable Diffusion结构解析-以图像生成图像(图生图,img2img)为例的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!