LabVIEW实现三相异步电机磁通模型
三相异步电动机由于经济和出色的机电坚固性而广泛用于工业化应用。这台机器的设计和驱动非常简单,但在控制扭矩和速度方面,它隐藏了相当大的功能复杂性。通过数学建模,可以理解机器动力学。
基于微分方程的相异步电动机模型不会以标准状态方程的形式给出电机。在基于差分的模型中,涉及定子电流和磁链的各种动力学并不明确。对于精确而坚固的控制器的设计,清楚地了解与定子电流以及磁链相关的时间常数的性质非常重要。
在状态空间表示中,各种时间常数是各种状态变量,这些变量是清晰可视化的。模型[A,B,C,D]的状态空间描述对于时不变系统将没有时间导数。因此,相异步电动机的状态空间模型可以分为两个动力学系统,一个由转矩动力学组成,另一个由速度动力学组成。
逆变器的相异步电动机馈电行为与电机在正弦电源下运行的行为完全不同。对静态转换器(逆变器)电机馈电的瞬态和稳态行为的研究提供了有关电压和电流的相关信息,这些信息仅决定转换器的效率。相异步电动机的动态模型有助于估计电机转矩的磁通以及定子磁通和定子电流之间的相位差。机器标准可以用时变互感的微分方程来描述,这种模型是复杂的时变系统,这使得控制器的设计非常复杂,因此,基于状态空间的机器模型给出了不同状态的概念,不同的状态向量如何相对于时间演变。

三相异步电动机的状态空间模型可以根据状态变量的选择来实现。该模型可以使用任意框架获得。可以查看相异步电动机的状态空间模型。状态空间模型在LabVIEW中使用控制和仿真循环工具包实现。

结果表明,使用控制和仿真包环境,可以在LabVIEW中轻松建模像感应电机这样的复杂系统。状态空间建模是一种非常强大的方法,特别是对于多相感应电机。交流电机、逆变器、同步电机的建模可以通过使用空间矢量方法轻松处理。这种建模方法保证了物理系统的精确精确模型,物理系统的精确模型有助于设计精确的控制器。
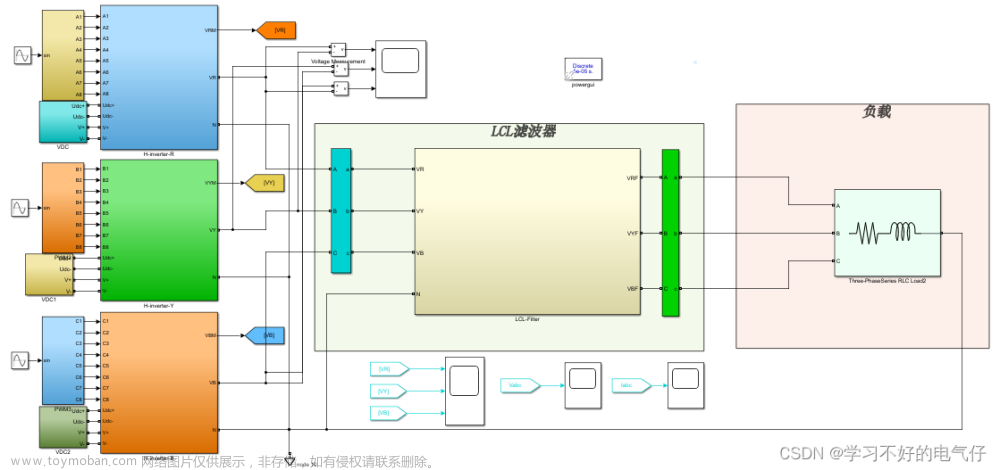
厂家没有提供LabVIEW的例子。根据通讯协议的相关的说明,编写了适合项目的程序。程序截图如下所示。
相关资料说明,如下所示。文章来源:https://www.toymoban.com/news/detail-618073.html
LabVIEW程序,如下附件所示。文章来源地址https://www.toymoban.com/news/detail-618073.html
到了这里,关于LabVIEW实现三相异步电机磁通模型的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!