首先,导入所需的库:
import numpy as np
%matplotlib widget
import matplotlib.pyplot as plt
from lab_utils_uni import plt_intuition, plt_stationary, plt_update_onclick, soup_bowl
plt.style.use('./deeplearning.mplstyle')
1、计算 cost
在这里,术语 ‘cost’ 是衡量模型预测房屋目标价格的程度的指标。
具有一个变量的 cost 计算公式为
J
(
w
,
b
)
=
1
2
m
∑
i
=
0
m
−
1
(
f
w
,
b
(
x
(
i
)
)
−
y
(
i
)
)
2
(1)
J(w,b) = \frac{1}{2m} \sum\limits_{i = 0}^{m-1} (f_{w,b}(x^{(i)}) - y^{(i)})^2 \tag{1}
J(w,b)=2m1i=0∑m−1(fw,b(x(i))−y(i))2(1)
其中,
f
w
,
b
(
x
(
i
)
)
=
w
x
(
i
)
+
b
(2)
f_{w,b}(x^{(i)}) = wx^{(i)} + b \tag{2}
fw,b(x(i))=wx(i)+b(2)
- f w , b ( x ( i ) ) f_{w,b}(x^{(i)}) fw,b(x(i)) 是使用参数 w , b w,b w,b 对样例 i i i 的预测。
- ( f w , b ( x ( i ) ) − y ( i ) ) 2 (f_{w,b}(x^{(i)}) -y^{(i)})^2 (fw,b(x(i))−y(i))2 是目标值和预测值之间的平方差。
-
m
m
m 个样例的平方差进行相加,并除以
2m得到 cost, 即 J ( w , b ) J(w,b) J(w,b).
下面的代码通过循环每个样例来计算 cost。
def compute_cost(x, y, w, b):
"""
Computes the cost function for linear regression.
Args:
x (ndarray (m,)): Data, m examples
y (ndarray (m,)): target values
w,b (scalar) : model parameters
Returns
total_cost (float): The cost of using w,b as the parameters for linear regression
to fit the data points in x and y
"""
# number of training examples
m = x.shape[0]
cost_sum = 0
for i in range(m):
f_wb = w * x[i] + b
cost = (f_wb - y[i]) ** 2
cost_sum = cost_sum + cost
total_cost = (1 / (2 * m)) * cost_sum
return total_cost
2、cost 函数的直观理解
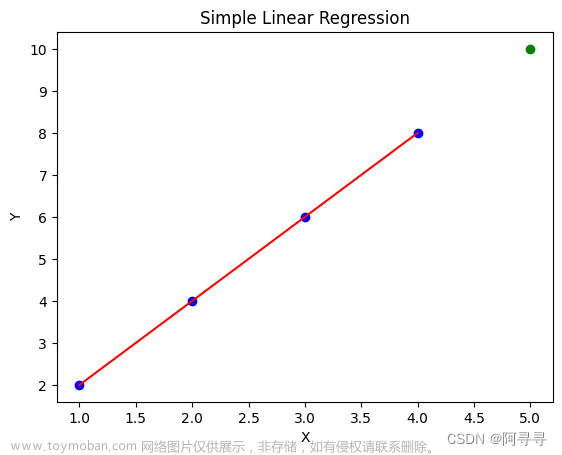
我们的目标是找到一个模型 f w , b ( x ) = w x + b f_{w,b}(x) = wx + b fw,b(x)=wx+b,其中 w w w 和 b b b 是参数,用于准确预测给定输入 x x x 的房屋价格。
上述 cost 计算公式(1)显示,如果可以选择 w w w 和 b b b,使得预测值 f w , b ( x ) f_{w,b}(x) fw,b(x) 与目标值 y y y 相匹配,那么 ( f w , b ( x ( i ) ) − y ( i ) ) 2 (f_{w,b}(x^{(i)}) - y^{(i)})^2 (fw,b(x(i))−y(i))2 项将为零,cost 将被最小化。
在之前的博客中,我们已经确定 b = 100 b=100 b=100 是一个最优解,所以让我们将 b b b 设为 100,并专注于 w w w。
plt_intuition(x_train,y_train)

从图中可以就看出:
- 当 𝑤=200 时,cost 被最小化,这与之前博客的结果相匹配。
- 因为在 cost 计算公式中,目标值与预测值之间的差异被平方,所以当 𝑤 太大或太小时,cost 会迅速增加。
- 使用通过最小化 cost 选择的 𝑤 和 𝑏 值得到的直线与数据完美拟合。
3、cost 可视化
我们可以通过绘制3D图或使用等高线图来观察 cost 如何随着同时改变 w 和 b 而变化。
首先,定义更大的数据集
x_train = np.array([1.0, 1.7, 2.0, 2.5, 3.0, 3.2])
y_train = np.array([250, 300, 480, 430, 630, 730,])
plt.close('all')
fig, ax, dyn_items = plt_stationary(x_train, y_train)
updater = plt_update_onclick(fig, ax, x_train, y_train, dyn_items)


注意,因为我们的训练样例不在一条直线上,所以最小化 cost 不是0。
cost 函数对损失进行平方的事实确保了“误差曲面”呈现凸形,就像一个碗一样。它总会有一个通过在所有维度上追随梯度可以到达的最小值点。在之前的图中,由于 w w w 和 b b b 维度的尺度不同,这很难被察觉。下图中的 w w w 和 b b b 是对称的。
soup_bowl()

总结
- cost 计算公式提供了衡量预测与训练数据匹配程度的指标。
- 最小化 cost 可以提供参数 w w w、 b b b 的最优值。
附录
lab_utils_common.py源码:文章来源:https://www.toymoban.com/news/detail-618150.html
"""
lab_utils_common.py
functions common to all optional labs, Course 1, Week 2
"""
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('./deeplearning.mplstyle')
dlblue = '#0096ff'; dlorange = '#FF9300'; dldarkred='#C00000'; dlmagenta='#FF40FF'; dlpurple='#7030A0';
dlcolors = [dlblue, dlorange, dldarkred, dlmagenta, dlpurple]
dlc = dict(dlblue = '#0096ff', dlorange = '#FF9300', dldarkred='#C00000', dlmagenta='#FF40FF', dlpurple='#7030A0')
##########################################################
# Regression Routines
##########################################################
#Function to calculate the cost
def compute_cost_matrix(X, y, w, b, verbose=False):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
verbose : (Boolean) If true, print out intermediate value f_wb
Returns
cost: (scalar)
"""
m = X.shape[0]
# calculate f_wb for all examples.
f_wb = X @ w + b
# calculate cost
total_cost = (1/(2*m)) * np.sum((f_wb-y)**2)
if verbose: print("f_wb:")
if verbose: print(f_wb)
return total_cost
def compute_gradient_matrix(X, y, w, b):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns
dj_dw (ndarray (n,1)): The gradient of the cost w.r.t. the parameters w.
dj_db (scalar): The gradient of the cost w.r.t. the parameter b.
"""
m,n = X.shape
f_wb = X @ w + b
e = f_wb - y
dj_dw = (1/m) * (X.T @ e)
dj_db = (1/m) * np.sum(e)
return dj_db,dj_dw
# Loop version of multi-variable compute_cost
def compute_cost(X, y, w, b):
"""
compute cost
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns
cost (scalar) : cost
"""
m = X.shape[0]
cost = 0.0
for i in range(m):
f_wb_i = np.dot(X[i],w) + b #(n,)(n,)=scalar
cost = cost + (f_wb_i - y[i])**2
cost = cost/(2*m)
return cost
def compute_gradient(X, y, w, b):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns
dj_dw (ndarray Shape (n,)): The gradient of the cost w.r.t. the parameters w.
dj_db (scalar): The gradient of the cost w.r.t. the parameter b.
"""
m,n = X.shape #(number of examples, number of features)
dj_dw = np.zeros((n,))
dj_db = 0.
for i in range(m):
err = (np.dot(X[i], w) + b) - y[i]
for j in range(n):
dj_dw[j] = dj_dw[j] + err * X[i,j]
dj_db = dj_db + err
dj_dw = dj_dw/m
dj_db = dj_db/m
return dj_db,dj_dw
lab_utils_uni.py 源码:文章来源地址https://www.toymoban.com/news/detail-618150.html
"""
lab_utils_uni.py
routines used in Course 1, Week2, labs1-3 dealing with single variables (univariate)
"""
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.ticker import MaxNLocator
from matplotlib.gridspec import GridSpec
from matplotlib.colors import LinearSegmentedColormap
from ipywidgets import interact
from lab_utils_common import compute_cost
from lab_utils_common import dlblue, dlorange, dldarkred, dlmagenta, dlpurple, dlcolors
plt.style.use('./deeplearning.mplstyle')
n_bin = 5
dlcm = LinearSegmentedColormap.from_list(
'dl_map', dlcolors, N=n_bin)
##########################################################
# Plotting Routines
##########################################################
def plt_house_x(X, y,f_wb=None, ax=None):
''' plot house with aXis '''
if not ax:
fig, ax = plt.subplots(1,1)
ax.scatter(X, y, marker='x', c='r', label="Actual Value")
ax.set_title("Housing Prices")
ax.set_ylabel('Price (in 1000s of dollars)')
ax.set_xlabel(f'Size (1000 sqft)')
if f_wb is not None:
ax.plot(X, f_wb, c=dlblue, label="Our Prediction")
ax.legend()
def mk_cost_lines(x,y,w,b, ax):
''' makes vertical cost lines'''
cstr = "cost = (1/m)*("
ctot = 0
label = 'cost for point'
addedbreak = False
for p in zip(x,y):
f_wb_p = w*p[0]+b
c_p = ((f_wb_p - p[1])**2)/2
c_p_txt = c_p
ax.vlines(p[0], p[1],f_wb_p, lw=3, color=dlpurple, ls='dotted', label=label)
label='' #just one
cxy = [p[0], p[1] + (f_wb_p-p[1])/2]
ax.annotate(f'{c_p_txt:0.0f}', xy=cxy, xycoords='data',color=dlpurple,
xytext=(5, 0), textcoords='offset points')
cstr += f"{c_p_txt:0.0f} +"
if len(cstr) > 38 and addedbreak is False:
cstr += "\n"
addedbreak = True
ctot += c_p
ctot = ctot/(len(x))
cstr = cstr[:-1] + f") = {ctot:0.0f}"
ax.text(0.15,0.02,cstr, transform=ax.transAxes, color=dlpurple)
##########
# Cost lab
##########
def plt_intuition(x_train, y_train):
w_range = np.array([200-200,200+200])
tmp_b = 100
w_array = np.arange(*w_range, 5)
cost = np.zeros_like(w_array)
for i in range(len(w_array)):
tmp_w = w_array[i]
cost[i] = compute_cost(x_train, y_train, tmp_w, tmp_b)
@interact(w=(*w_range,10),continuous_update=False)
def func( w=150):
f_wb = np.dot(x_train, w) + tmp_b
fig, ax = plt.subplots(1, 2, constrained_layout=True, figsize=(8,4))
fig.canvas.toolbar_position = 'bottom'
mk_cost_lines(x_train, y_train, w, tmp_b, ax[0])
plt_house_x(x_train, y_train, f_wb=f_wb, ax=ax[0])
ax[1].plot(w_array, cost)
cur_cost = compute_cost(x_train, y_train, w, tmp_b)
ax[1].scatter(w,cur_cost, s=100, color=dldarkred, zorder= 10, label= f"cost at w={w}")
ax[1].hlines(cur_cost, ax[1].get_xlim()[0],w, lw=4, color=dlpurple, ls='dotted')
ax[1].vlines(w, ax[1].get_ylim()[0],cur_cost, lw=4, color=dlpurple, ls='dotted')
ax[1].set_title("Cost vs. w, (b fixed at 100)")
ax[1].set_ylabel('Cost')
ax[1].set_xlabel('w')
ax[1].legend(loc='upper center')
fig.suptitle(f"Minimize Cost: Current Cost = {cur_cost:0.0f}", fontsize=12)
plt.show()
# this is the 2D cost curve with interactive slider
def plt_stationary(x_train, y_train):
# setup figure
fig = plt.figure( figsize=(9,8))
#fig = plt.figure(constrained_layout=True, figsize=(12,10))
fig.set_facecolor('#ffffff') #white
fig.canvas.toolbar_position = 'top'
#gs = GridSpec(2, 2, figure=fig, wspace = 0.01)
gs = GridSpec(2, 2, figure=fig)
ax0 = fig.add_subplot(gs[0, 0])
ax1 = fig.add_subplot(gs[0, 1])
ax2 = fig.add_subplot(gs[1, :], projection='3d')
ax = np.array([ax0,ax1,ax2])
#setup useful ranges and common linspaces
w_range = np.array([200-300.,200+300])
b_range = np.array([50-300., 50+300])
b_space = np.linspace(*b_range, 100)
w_space = np.linspace(*w_range, 100)
# get cost for w,b ranges for contour and 3D
tmp_b,tmp_w = np.meshgrid(b_space,w_space)
z=np.zeros_like(tmp_b)
for i in range(tmp_w.shape[0]):
for j in range(tmp_w.shape[1]):
z[i,j] = compute_cost(x_train, y_train, tmp_w[i][j], tmp_b[i][j] )
if z[i,j] == 0: z[i,j] = 1e-6
w0=200;b=-100 #initial point
### plot model w cost ###
f_wb = np.dot(x_train,w0) + b
mk_cost_lines(x_train,y_train,w0,b,ax[0])
plt_house_x(x_train, y_train, f_wb=f_wb, ax=ax[0])
### plot contour ###
CS = ax[1].contour(tmp_w, tmp_b, np.log(z),levels=12, linewidths=2, alpha=0.7,colors=dlcolors)
ax[1].set_title('Cost(w,b)')
ax[1].set_xlabel('w', fontsize=10)
ax[1].set_ylabel('b', fontsize=10)
ax[1].set_xlim(w_range) ; ax[1].set_ylim(b_range)
cscat = ax[1].scatter(w0,b, s=100, color=dlblue, zorder= 10, label="cost with \ncurrent w,b")
chline = ax[1].hlines(b, ax[1].get_xlim()[0],w0, lw=4, color=dlpurple, ls='dotted')
cvline = ax[1].vlines(w0, ax[1].get_ylim()[0],b, lw=4, color=dlpurple, ls='dotted')
ax[1].text(0.5,0.95,"Click to choose w,b", bbox=dict(facecolor='white', ec = 'black'), fontsize = 10,
transform=ax[1].transAxes, verticalalignment = 'center', horizontalalignment= 'center')
#Surface plot of the cost function J(w,b)
ax[2].plot_surface(tmp_w, tmp_b, z, cmap = dlcm, alpha=0.3, antialiased=True)
ax[2].plot_wireframe(tmp_w, tmp_b, z, color='k', alpha=0.1)
plt.xlabel("$w$")
plt.ylabel("$b$")
ax[2].zaxis.set_rotate_label(False)
ax[2].xaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax[2].yaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax[2].zaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax[2].set_zlabel("J(w, b)\n\n", rotation=90)
plt.title("Cost(w,b) \n [You can rotate this figure]", size=12)
ax[2].view_init(30, -120)
return fig,ax, [cscat, chline, cvline]
#https://matplotlib.org/stable/users/event_handling.html
class plt_update_onclick:
def __init__(self, fig, ax, x_train,y_train, dyn_items):
self.fig = fig
self.ax = ax
self.x_train = x_train
self.y_train = y_train
self.dyn_items = dyn_items
self.cid = fig.canvas.mpl_connect('button_press_event', self)
def __call__(self, event):
if event.inaxes == self.ax[1]:
ws = event.xdata
bs = event.ydata
cst = compute_cost(self.x_train, self.y_train, ws, bs)
# clear and redraw line plot
self.ax[0].clear()
f_wb = np.dot(self.x_train,ws) + bs
mk_cost_lines(self.x_train,self.y_train,ws,bs,self.ax[0])
plt_house_x(self.x_train, self.y_train, f_wb=f_wb, ax=self.ax[0])
# remove lines and re-add on countour plot and 3d plot
for artist in self.dyn_items:
artist.remove()
a = self.ax[1].scatter(ws,bs, s=100, color=dlblue, zorder= 10, label="cost with \ncurrent w,b")
b = self.ax[1].hlines(bs, self.ax[1].get_xlim()[0],ws, lw=4, color=dlpurple, ls='dotted')
c = self.ax[1].vlines(ws, self.ax[1].get_ylim()[0],bs, lw=4, color=dlpurple, ls='dotted')
d = self.ax[1].annotate(f"Cost: {cst:.0f}", xy= (ws, bs), xytext = (4,4), textcoords = 'offset points',
bbox=dict(facecolor='white'), size = 10)
#Add point in 3D surface plot
e = self.ax[2].scatter3D(ws, bs,cst , marker='X', s=100)
self.dyn_items = [a,b,c,d,e]
self.fig.canvas.draw()
def soup_bowl():
""" Create figure and plot with a 3D projection"""
fig = plt.figure(figsize=(8,8))
#Plot configuration
ax = fig.add_subplot(111, projection='3d')
ax.xaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax.yaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax.zaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax.zaxis.set_rotate_label(False)
ax.view_init(45, -120)
#Useful linearspaces to give values to the parameters w and b
w = np.linspace(-20, 20, 100)
b = np.linspace(-20, 20, 100)
#Get the z value for a bowl-shaped cost function
z=np.zeros((len(w), len(b)))
j=0
for x in w:
i=0
for y in b:
z[i,j] = x**2 + y**2
i+=1
j+=1
#Meshgrid used for plotting 3D functions
W, B = np.meshgrid(w, b)
#Create the 3D surface plot of the bowl-shaped cost function
ax.plot_surface(W, B, z, cmap = "Spectral_r", alpha=0.7, antialiased=False)
ax.plot_wireframe(W, B, z, color='k', alpha=0.1)
ax.set_xlabel("$w$")
ax.set_ylabel("$b$")
ax.set_zlabel("$J(w,b)$", rotation=90)
ax.set_title("$J(w,b)$\n [You can rotate this figure]", size=15)
plt.show()
def inbounds(a,b,xlim,ylim):
xlow,xhigh = xlim
ylow,yhigh = ylim
ax, ay = a
bx, by = b
if (ax > xlow and ax < xhigh) and (bx > xlow and bx < xhigh) \
and (ay > ylow and ay < yhigh) and (by > ylow and by < yhigh):
return True
return False
def plt_contour_wgrad(x, y, hist, ax, w_range=[-100, 500, 5], b_range=[-500, 500, 5],
contours = [0.1,50,1000,5000,10000,25000,50000],
resolution=5, w_final=200, b_final=100,step=10 ):
b0,w0 = np.meshgrid(np.arange(*b_range),np.arange(*w_range))
z=np.zeros_like(b0)
for i in range(w0.shape[0]):
for j in range(w0.shape[1]):
z[i][j] = compute_cost(x, y, w0[i][j], b0[i][j] )
CS = ax.contour(w0, b0, z, contours, linewidths=2,
colors=[dlblue, dlorange, dldarkred, dlmagenta, dlpurple])
ax.clabel(CS, inline=1, fmt='%1.0f', fontsize=10)
ax.set_xlabel("w"); ax.set_ylabel("b")
ax.set_title('Contour plot of cost J(w,b), vs b,w with path of gradient descent')
w = w_final; b=b_final
ax.hlines(b, ax.get_xlim()[0],w, lw=2, color=dlpurple, ls='dotted')
ax.vlines(w, ax.get_ylim()[0],b, lw=2, color=dlpurple, ls='dotted')
base = hist[0]
for point in hist[0::step]:
edist = np.sqrt((base[0] - point[0])**2 + (base[1] - point[1])**2)
if(edist > resolution or point==hist[-1]):
if inbounds(point,base, ax.get_xlim(),ax.get_ylim()):
plt.annotate('', xy=point, xytext=base,xycoords='data',
arrowprops={'arrowstyle': '->', 'color': 'r', 'lw': 3},
va='center', ha='center')
base=point
return
def plt_divergence(p_hist, J_hist, x_train,y_train):
x=np.zeros(len(p_hist))
y=np.zeros(len(p_hist))
v=np.zeros(len(p_hist))
for i in range(len(p_hist)):
x[i] = p_hist[i][0]
y[i] = p_hist[i][1]
v[i] = J_hist[i]
fig = plt.figure(figsize=(12,5))
plt.subplots_adjust( wspace=0 )
gs = fig.add_gridspec(1, 5)
fig.suptitle(f"Cost escalates when learning rate is too large")
#===============
# First subplot
#===============
ax = fig.add_subplot(gs[:2], )
# Print w vs cost to see minimum
fix_b = 100
w_array = np.arange(-70000, 70000, 1000)
cost = np.zeros_like(w_array)
for i in range(len(w_array)):
tmp_w = w_array[i]
cost[i] = compute_cost(x_train, y_train, tmp_w, fix_b)
ax.plot(w_array, cost)
ax.plot(x,v, c=dlmagenta)
ax.set_title("Cost vs w, b set to 100")
ax.set_ylabel('Cost')
ax.set_xlabel('w')
ax.xaxis.set_major_locator(MaxNLocator(2))
#===============
# Second Subplot
#===============
tmp_b,tmp_w = np.meshgrid(np.arange(-35000, 35000, 500),np.arange(-70000, 70000, 500))
z=np.zeros_like(tmp_b)
for i in range(tmp_w.shape[0]):
for j in range(tmp_w.shape[1]):
z[i][j] = compute_cost(x_train, y_train, tmp_w[i][j], tmp_b[i][j] )
ax = fig.add_subplot(gs[2:], projection='3d')
ax.plot_surface(tmp_w, tmp_b, z, alpha=0.3, color=dlblue)
ax.xaxis.set_major_locator(MaxNLocator(2))
ax.yaxis.set_major_locator(MaxNLocator(2))
ax.set_xlabel('w', fontsize=16)
ax.set_ylabel('b', fontsize=16)
ax.set_zlabel('\ncost', fontsize=16)
plt.title('Cost vs (b, w)')
# Customize the view angle
ax.view_init(elev=20., azim=-65)
ax.plot(x, y, v,c=dlmagenta)
return
# draw derivative line
# y = m*(x - x1) + y1
def add_line(dj_dx, x1, y1, d, ax):
x = np.linspace(x1-d, x1+d,50)
y = dj_dx*(x - x1) + y1
ax.scatter(x1, y1, color=dlblue, s=50)
ax.plot(x, y, '--', c=dldarkred,zorder=10, linewidth = 1)
xoff = 30 if x1 == 200 else 10
ax.annotate(r"$\frac{\partial J}{\partial w}$ =%d" % dj_dx, fontsize=14,
xy=(x1, y1), xycoords='data',
xytext=(xoff, 10), textcoords='offset points',
arrowprops=dict(arrowstyle="->"),
horizontalalignment='left', verticalalignment='top')
def plt_gradients(x_train,y_train, f_compute_cost, f_compute_gradient):
#===============
# First subplot
#===============
fig,ax = plt.subplots(1,2,figsize=(12,4))
# Print w vs cost to see minimum
fix_b = 100
w_array = np.linspace(-100, 500, 50)
w_array = np.linspace(0, 400, 50)
cost = np.zeros_like(w_array)
for i in range(len(w_array)):
tmp_w = w_array[i]
cost[i] = f_compute_cost(x_train, y_train, tmp_w, fix_b)
ax[0].plot(w_array, cost,linewidth=1)
ax[0].set_title("Cost vs w, with gradient; b set to 100")
ax[0].set_ylabel('Cost')
ax[0].set_xlabel('w')
# plot lines for fixed b=100
for tmp_w in [100,200,300]:
fix_b = 100
dj_dw,dj_db = f_compute_gradient(x_train, y_train, tmp_w, fix_b )
j = f_compute_cost(x_train, y_train, tmp_w, fix_b)
add_line(dj_dw, tmp_w, j, 30, ax[0])
#===============
# Second Subplot
#===============
tmp_b,tmp_w = np.meshgrid(np.linspace(-200, 200, 10), np.linspace(-100, 600, 10))
U = np.zeros_like(tmp_w)
V = np.zeros_like(tmp_b)
for i in range(tmp_w.shape[0]):
for j in range(tmp_w.shape[1]):
U[i][j], V[i][j] = f_compute_gradient(x_train, y_train, tmp_w[i][j], tmp_b[i][j] )
X = tmp_w
Y = tmp_b
n=-2
color_array = np.sqrt(((V-n)/2)**2 + ((U-n)/2)**2)
ax[1].set_title('Gradient shown in quiver plot')
Q = ax[1].quiver(X, Y, U, V, color_array, units='width', )
ax[1].quiverkey(Q, 0.9, 0.9, 2, r'$2 \frac{m}{s}$', labelpos='E',coordinates='figure')
ax[1].set_xlabel("w"); ax[1].set_ylabel("b")
到了这里,关于【机器学习】Cost Function的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!