前言
在上一章节中我们讲了网络信息配置,那些网络信息的配置都是用户手动的去配置的,为了能跟电脑处于同一网段,且电脑能成功ping通板子,我们不仅要注意子网掩码,对于IP地址主机位和网络位的划分,而且还要注意不能跟同一网段已有IP地址的重复,对于新手和不了解网络的人来说,如何配置是件很麻烦的事,那么本章将通过DHCP协议,从dhcp服务器获取网络信息来进行配置(IPv4),直接省去了用户手动配置不知道如何配置的烦恼。
DHCP协议介绍
什么是DHCP?
动态主机配置协议DHCP(Dynamic Host Configuration Protocol)是一种网络管理协议,用于集中对用户IP地址进行动态管理和配置。
DHCP于1993年10月成为标准协议,其前身是BOOTP协议。DHCP协议由RFC 2131定义,采用客户端/服务器通信模式,由客户端(DHCP Client)向服务器(DHCP Server)提出配置申请,DHCP Server基于请求的客户端(DHCP Client)的mac地址为它动态分配IP地址、子网掩码、默认网关地址,域名服务器(DNS)地址和其他相关配置参数,以便可以与其他IP网络通信。
为什么要使用DHCP?
在IP网络中,每个连接Internet的设备都需要分配唯一的IP地址。DHCP使网络管理员能从中心结点监控和分配IP地址。当某台计算机移到网络中的其它位置时,能自动收到新的IP地址。DHCP实现的自动化分配IP地址不仅降低了配置和部署设备的时间,同时也降低了发生配置错误的可能性。另外DHCP服务器可以管理多个网段的配置信息,当某个网段的配置发生变化时,管理员只需要更新DHCP服务器上的相关配置即可,实现了集中化管理。
总体来看,DHCP相比设置静态IP地址带来了如下优势:
- 准确的IP配置:IP地址配置参数必须准确,并且在处理“ 192.168.XXX.XXX”之类的输入时,很容易出错。另外印刷错误通常很难解决,使用DHCP服务器可以最大程度地降低这种风险。
- 减少IP地址冲突:每个连接的设备都必须有一个IP地址。但是,每个地址只能使用一次,重复的地址将导致无法连接一个或两个设备的冲突。当手动分配地址时,尤其是在存在大量仅定期连接的端点(例如移动设备)时,可能会发生这种情况。DHCP的使用可确保每个地址仅使用一次。
- IP地址管理的自动化:如果没有DHCP,网络管理员将需要手动分配和撤消地址。跟踪哪个设备具有什么地址可能是徒劳的,因为几乎无法理解设备何时需要访问网络以及何时需要离开网络。DHCP允许将其自动化和集中化,因此网络专业人员可以从一个位置管理所有位置。
- 高效的变更管理:DHCP的使用使更改地址,范围或端点变得非常简单。例如,组织可能希望将其IP寻址方案从一个范围更改为另一个范围。DHCP服务器配置有新信息,该信息将传播到新端点。同样,如果升级并更换了网络设备,则不需要网络配置。
劣势:可能会导致同一设备的IP地址不固定,例如我们的服务器或者是一些设备想固定IP地址的话,这个时候就只能采取静态IP地址来配置了。
硬件准备
- W6100-EVB-Pico开发板
- 网线
- Micro USB数据线
注意:需将W6100-EVB-Pico通过RJ45网口接入到路由器(dhcp服务器)LAN口上,电脑也接入到同一路由器下(保证跟板子同一网段),路由器必须开启DHCP服务。
软件环境
- Visual Studio Code
W6100-EVB-Pico使用DHCP协议获取IP地址
步骤1:找到dhcp_client示例程序并打开
我们先打开dhcpv4.h可以看到四个头函数声明,是我们要用到的:
第一个是dhcpv4初始化,传入一个socket端口号s和协议解析数据包所用的缓存buf;
第二个根据描述是让我们把它放到一个1s的定时器里,用与dhcp协议解析数据包时的计时;
第三个需要用户传入三个回调函数,用于不同状态下的回调处理;
第四个是dhcpv4运行函数,根据函数上面的描述,得知该函数是直接放到主函数循环里运行的,
这几个函数的具体实现大家可以自行了解。
/*
* @brief DHCP client initialization (outside of the main loop)
* @param s - socket number
* @param buf - buffer for processing DHCP message
*/
void DHCPv4_init(uint8_t s, uint8_t * buf);
/*
* @brief DHCP 1s Tick Timer handler
* @note SHOULD BE register to your system 1s Tick timer handler
*/
void DHCPv4_time_handler(void);
/*
* @brief Register call back function
* @param ip_assign - callback func when IP is assigned from DHCP server first
* @param ip_update - callback func when IP is changed
* @param ip_conflict - callback func when the assigned IP is conflict with others.
*/
void reg_dhcpv4_cbfunc(void(*ip_assign)(void), void(*ip_update)(void), void(*ip_conflict)(void));
/*
* @brief DHCP client in the main loop
* @return The value is as the follow \n
* @ref DHCPV4_FAILED \n
* @ref DHCPv4_runNING \n
* @ref DHCP_IPV4_ASSIGN \n
* @ref DHCP_IPV4_CHANGED \n
* @ref DHCP_IPV4_LEASED \n
* @ref DHCPV4_STOPPED \n
*
* @note This function is always called by you main task.
*/
uint8_t DHCPv4_run(void);然后我们打开dhcp_client.c,可以看到主函数前声明的几个函数和初始化的网络配置信息,注意其中一个元素ipmode我们选择NETINFO_DHCP_V4,即从dhcp获取IPv4等网络信息;
void dhcp_test(void);
void my_ip_conflict(void);
void my_ip_assign(void);
void network_init(void);
wiz_NetInfo net_info = {
.mac = {0x00, 0x08, 0xdc, 0x16, 0xed, 0x2e},
.ip = {192, 168, 1, 10},
.sn = {255, 255, 255, 0},
.gw = {192, 168, 1, 1},
.dns = {8, 8, 8, 8},
.ipmode = NETINFO_DHCP_V4};
uint8_t my_dhcp_retry = 0;
uint8_t g_msec_cnt = 0;然后我们先看dhcp_test()函数的实现,它把DHCPv4_run()函数用一个Switch状态机去获取其返回的值(dhcp状态)并做出相应的处理,前面提到DHCPv4_run()函数是直接放主函数循环里的,因而这里dhcp_test()对其封装后直接运行在主函数的while循环里。
void dhcp_test(void)
{
switch (DHCPv4_run())
{
case DHCP_IPV4_ASSIGN:
case DHCP_IPV4_CHANGED:
break;
case DHCP_IPV4_LEASED:
break;
case DHCPV4_FAILED:
my_dhcp_retry++;
if (my_dhcp_retry > 5)
{
printf(">>DHCP %d Failed\r\n", my_dhcp_retry);
my_dhcp_retry = 0;
DHCPv4_stop();
network_init();
}
default:
break;
}
}
void my_ip_conflict(void)
{
printf("CONFLICT IP from DHCP\r\n");
while(1);
}
void my_ip_assign(void)
{
getIPfromDHCPv4(net_info.ip);
getGWfromDHCPv4(net_info.gw);
getSNfromDHCPv4(net_info.sn);
getDNSfromDHCPv4(net_info.dns);
net_info.ipmode = NETINFO_DHCP_V4;
network_init();
printf("DHCP LEASED TIME:%ld Sec.\r\n",getDHCPv4Leasetime());
}
void network_init(void)
{
uint8_t tmpstr[6] = {0,};
wiz_NetInfo netinfo;
ctlnetwork(CN_SET_NETINFO,(void*)&net_info);
ctlnetwork(CN_GET_NETINFO,(void*)&netinfo);
ctlwizchip(CW_GET_ID,(void*)tmpstr);
if(netinfo.ipmode == NETINFO_DHCP_V4) printf("\r\n=== %s NET CONF:DHCP ===\r\n",(char*)tmpstr);
else printf("\r\n===%s NET CONF : Static === \r\n",(char*)tmpstr);
printf("mac: %02X-%02X-%02X-%02X-%02X-%02X\r\n", netinfo.mac[0], netinfo.mac[1], netinfo.mac[2], netinfo.mac[3], netinfo.mac[4], netinfo.mac[5]);
printf("ip: %d.%d.%d.%d\r\n", netinfo.ip[0], netinfo.ip[1], netinfo.ip[2], netinfo.ip[3]);
printf("mask: %d.%d.%d.%d\r\n", netinfo.sn[0], netinfo.sn[1], netinfo.sn[2], netinfo.sn[3]);
printf("gw: %d.%d.%d.%d\r\n", netinfo.gw[0], netinfo.gw[1], netinfo.gw[2], netinfo.gw[3]);
printf("dns: %d.%d.%d.%d\r\n", netinfo.dns[0], netinfo.dns[1], netinfo.dns[2], netinfo.dns[3]);
}然后是写一个定时器调用DHCPv4_time_handler用于dhcp协议的计时;
/* Timer */
static void repeating_timer_callback(void)
{
g_msec_cnt++;
if (g_msec_cnt >= 1000 - 1)
{
g_msec_cnt = 0;
DHCPv4_time_handler();
}
}最后看主函数,因为dhcp协议需要我们首先需要为它配置一个MAC地址,注意配置网络信息需要对网络锁寄存器进行解锁后才能配置。
int main()
{
uint8_t temp;
uint8_t databuf[2048];
stdio_init_all();
sleep_ms(2000);
printf("W6100 network install example.\r\n");
wizchip_initialize();
/* Chip software reset. All registers are initialized. */
wizchip_sw_reset();
/* Determine the network lock register status. */
if(!ctlwizchip(SYS_NET_LOCK, &temp))
{
printf("unlock.\n");
NETUNLOCK();
}
setSHAR(net_info.mac);
DHCPv4_init(0,databuf);
reg_dhcpv4_cbfunc(my_ip_assign,my_ip_assign,my_ip_conflict);
while (true)
{
dhcp_test();
sleep_ms(100);
}
}步骤2:编译烧录
- 选择GCC arm-none-eabi编译链
- 选择编译项目为dhcp_client
- 点击生成

编译之后,按住boot按钮把开发板连接到电脑上,也可以连接后按住boot键再按下run复位上电,此时电脑将开发板识别为大容量存储器,我们将build/examples/dhcp_client文件夹下面的uf2文件拖入开发板的大容量存储器中,就烧录好了。

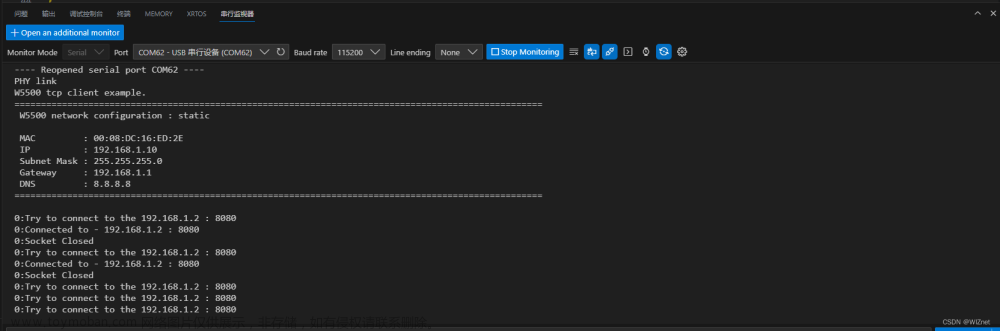
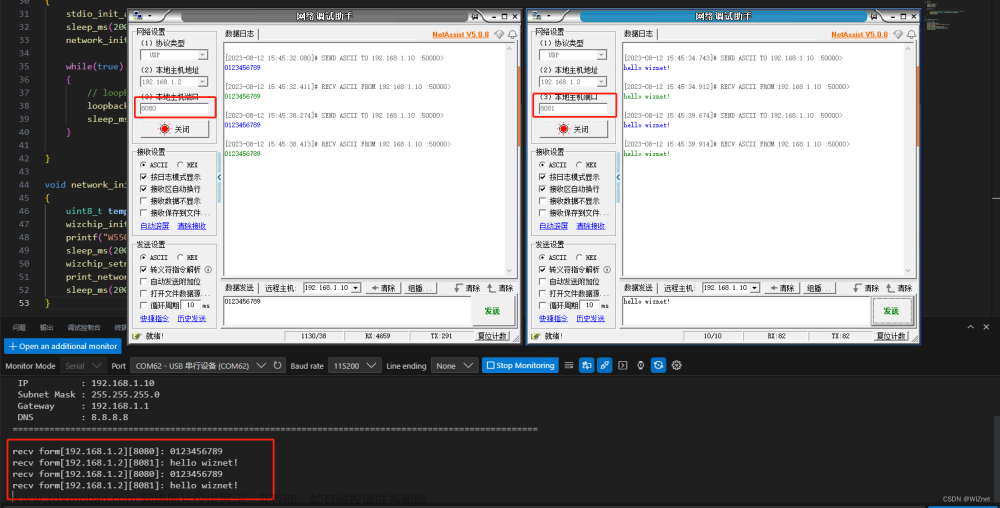
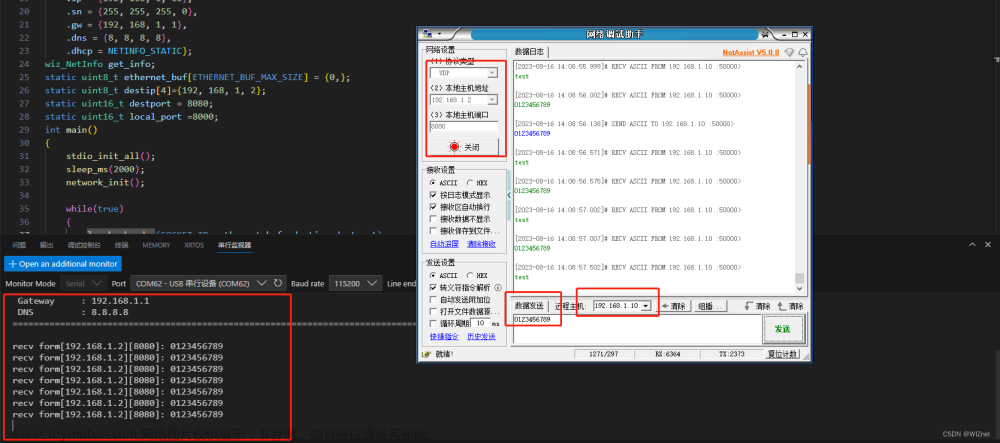
步骤3:验证测试
此时串口会打印获取到的IP地址信息,我们也能直接ping通获取到的IP地址


示例下载链接
链接:W6100-EVB-Pico示例文章来源:https://www.toymoban.com/news/detail-618176.html
本期内容就分享到这里啦!觉得写的还不错的话给个关注鼓励一下吧!下期我们来讲讲如何通过DNS解析百度的域名地址。文章来源地址https://www.toymoban.com/news/detail-618176.html
到了这里,关于WIZnet W6100-EVB-Pico DHCP 配置教程(三)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!