前言
文件
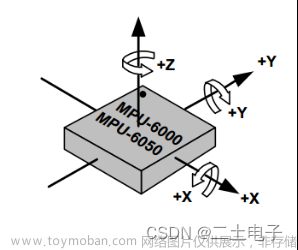
记录使用dmp库来读取mpu6050的角度。
这是参考文件
参考1–主要参考
github参考
参考2
参考三
一、相关文件
相关文件在这里下载(未填,不过可以在上面的git中下载)

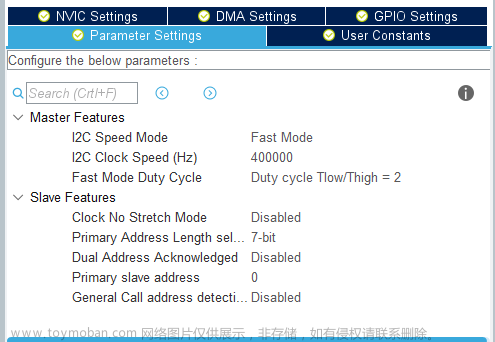
二、cubemx配置
 文章来源:https://www.toymoban.com/news/detail-618252.html
文章来源:https://www.toymoban.com/news/detail-618252.html
三、代码
变量
float pitch,roll,yaw; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
short temp; //温度
初始化
while(MPU_Init()); //初始化MPU6050
while(mpu_dmp_init())
{
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
// delay_ms(200);
}
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
主循环
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
temp=MPU_Get_Temperature(); //得到温度值
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
}
总结
over文章来源地址https://www.toymoban.com/news/detail-618252.html
到了这里,关于stm32 mpu6050 cubemx DMP法读取角度的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![[Arduino ESP32] mpu6050使用笔记(含dmp)](https://imgs.yssmx.com/Uploads/2024/02/675539-1.png)