前言
在本系列笔者将结合工作中对通信实战部分的应用经验进一步介绍常用,包括但不限于通信各模块的开发教程,代码逻辑分析,调测试方法及典型问题分析。
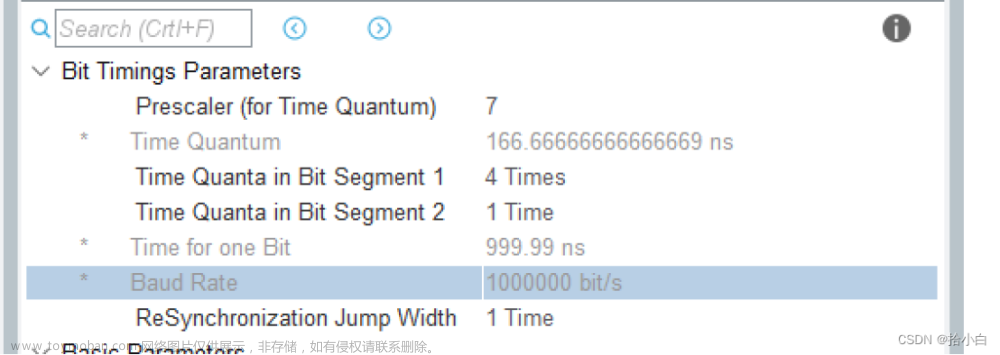
项目通信部分开发中,会接收到客户这样一条需求:对于本节点发送报文的周期需要稳定发送,前后两帧时间差波动不应超过报文周期的10%,但项目中我们如何对报文周期进行测试?当遇到CAN报文发送周期不准问题时,有哪些可能原因?对应的优化策略是什么?本文我们就一起来看下,框架如下:![Autosar通信实战系列02-CAN报文发送周期测试脚本开发及周期不准优化,AutoSar实战进阶系列[全面/持续更新中],Autosar 通信实战系列,autosar,COM,CAN](https://imgs.yssmx.com/Uploads/2023/07/618633-1.png) 文章来源:https://www.toymoban.com/news/detail-618633.html
文章来源:https://www.toymoban.com/news/detail-618633.html
1. CAN发送报文的周期测试脚本开发
本章节我们一起以一帧10ms周期的报文0x110为例,基于Capl脚本来看下报文发送的周期如何测试,前后两帧周期报文的时间差是否超过既定范围。话不多说直接上文章来源地址https://www.toymoban.com/news/detail-618633.html
到了这里,关于Autosar通信实战系列02-CAN报文发送周期测试脚本开发及周期不准优化的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!