实验准备:
两块带有CAN 收发器的STM32 MCU板子
1.HAL 库实现部分
pin 设置,依据datasheet 和原理图

时钟设置


工程设置

 文章来源:https://www.toymoban.com/news/detail-618900.html
文章来源:https://www.toymoban.com/news/detail-618900.html
1) main.c文章来源地址https://www.toymoban.com/news/detail-618900.html
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* Private variables ---------------------------------------------------------*/
void CAN1_Send_Test();
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
CAN1_Send_Test();
HAL_Delay(3000);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL16;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
- gpio.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file gpio.c
* @brief This file provides code for the configuration
* of all used GPIO pins.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "gpio.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/*----------------------------------------------------------------------------*/
/* Configure GPIO */
/*----------------------------------------------------------------------------*/
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
- can.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.c
* @brief This file provides code for the configuration
* of the CAN instances.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "can.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
CAN_HandleTypeDef hcan;
void ledOnGetSignal() {
HAL_GPIO_TogglePin(GPIOC, LED_Pin);
HAL_Delay(1000);
// HAL_GPIO_TogglePin(GPIOC, LED_Pin);
// //HAL_GPIO_WritePin(GPIOC, LED_Pin, GPIO_PIN_RESET);
// HAL_Delay(1000);
}
void ledOnGetSignal2() {
HAL_GPIO_WritePin(GPIOC, LED_Pin, GPIO_PIN_RESET);
// HAL_GPIO_TogglePin(GPIOC, LED_Pin);
// HAL_Delay(500);
// HAL_GPIO_TogglePin(GPIOC, LED_Pin);
// //HAL_GPIO_WritePin(GPIOC, LED_Pin, GPIO_PIN_RESET);
// HAL_Delay(500);
}
/* USER CODE END Includes */
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
extern int g;
CAN_RxHeaderTypeDef RxMessage;
uint8_t Data[2];
// extern uint16_t feedback;
RxMessage.DLC = 2;
RxMessage.StdId = 0x00;
RxMessage.ExtId = 0x0000;
RxMessage.IDE=CAN_ID_EXT;
RxMessage.RTR=CAN_RTR_DATA;
if (HAL_CAN_GetState(hcan)!= RESET)
{
HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMessage, Data);
// feedback=Data[2]<<8 |Data[3];
if (Data[0] == 0x99) {
ledOnGetSignal();
}
if (Data[0] == 0x99 ) {
ledOnGetSignal2();
}
}
}
/* CAN init function */
void MX_CAN_Init(void)
{
/* USER CODE BEGIN CAN_Init 0 */
/* USER CODE END CAN_Init 0 */
/* USER CODE BEGIN CAN_Init 1 */
/* USER CODE END CAN_Init 1 */
hcan.Instance = CAN1;
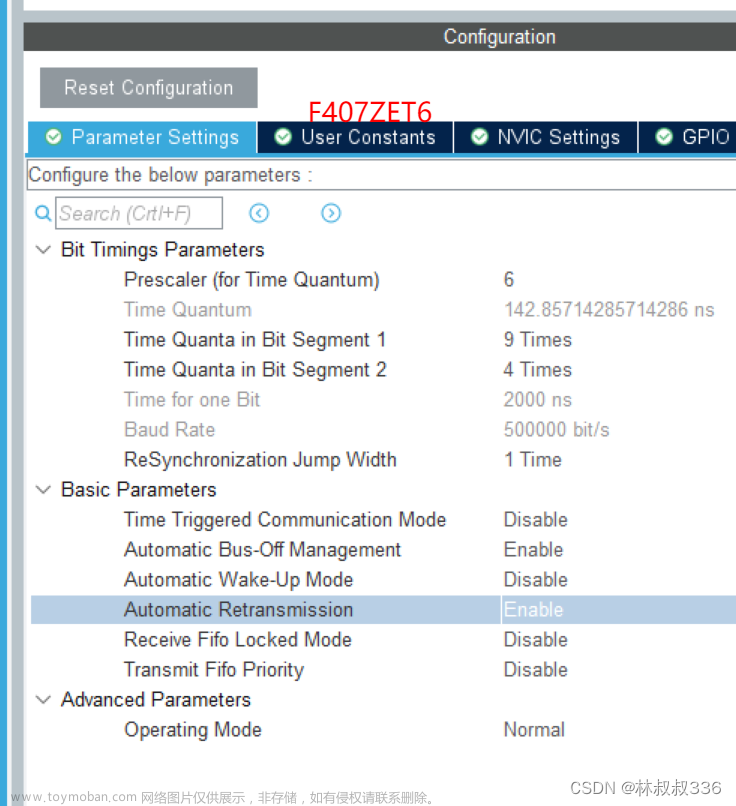
hcan.Init.Prescaler = 60;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_3TQ;
hcan.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan.Init.TimeTriggeredMode = ENABLE;
hcan.Init.AutoBusOff = DISABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = ENABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN_Init 2 */
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 0; //chenal 0
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //????????
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //????????32?
sFilterConfig.FilterIdHigh = 0x0000; //??????
sFilterConfig.FilterIdLow = 0x0000; //??????
//MASK bit 0 means don't care,bit 0 means match
sFilterConfig.FilterMaskIdHigh = 0x0000; //????? //?????????????,????????????????
sFilterConfig.FilterMaskIdLow = 0x0000; //?????
sFilterConfig.FilterFIFOAssignment = CAN_FILTER_FIFO0; //FIFO0????FIFO1????????,?????????????FIFO0?
sFilterConfig.FilterActivation = CAN_FILTER_ENABLE; //enable filter
sFilterConfig.SlaveStartFilterBank = 0; //???can????????,????CAN??,????????
HAL_CAN_ConfigFilter(&hcan, &sFilterConfig);
HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING);
/* USER CODE END CAN_Init 2 */
}
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspInit 0 */
/* USER CODE END CAN1_MspInit 0 */
/* CAN1 clock enable */
__HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**CAN GPIO Configuration
PA11 ------> CAN_RX
PA12 ------> CAN_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* CAN1 interrupt Init */
HAL_NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USB_LP_CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspInit 1 */
/* USER CODE END CAN1_MspInit 1 */
}
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspDeInit 0 */
/* USER CODE END CAN1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_CAN1_CLK_DISABLE();
/**CAN GPIO Configuration
PA11 ------> CAN_RX
PA12 ------> CAN_TX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12);
/* CAN1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USB_LP_CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspDeInit 1 */
/* USER CODE END CAN1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
- ST 老版本库
- main.c
/******************** ********************
* ÎļþÃû £ºmain.c
* ÃèÊö £º¸øÏàͬÁ½¸öMINI°åÏÂÔش˳ÌÐòºó£¬°´ÏÂÒ»¸ö°å×ÓÉϵİ´¼ü£¬¿ÉÒÔµãÁÁÁíÒ»¸ö°å×Ó
* É϶ÔÓ¦µÄLED¡£Á½¸ö°å×Ó²»·ÖÖ÷´Ó¡£ receiv site
* ʵÑéƽ̨£ºMINI STM32¿ª·¢°å »ùÓÚSTM32F103VET6
* ¿â°æ±¾ £ºST3.0.0
*********************************************************/
#include "stm32f10x.h"
#include "can.h"
#include "led.h"
void Delay(vu32 nCount);
/*°´¼ü¹Ü½Å³õʼ»¯*/
void KeyInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//ʹÄÜÍâÉèʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//ʹÄÜÍâÉèʱÖÓ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_15 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; //×î¸ßÊä³öËÙÂÊ10MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//ÉÏÀÊäÈë
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; //×î¸ßÊä³öËÙÂÊ10MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //ÉÏÀÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void lightOn(void)
{
LED1( ON ); // ÁÁ D3
Delay(0x200000);
LED1( OFF ); // Ãð
LED2( ON ); //D2
Delay(0x200000);
LED2( OFF );
LED3( ON ); //D2
Delay(0x200000);
LED3( OFF );
}
/*¼ì²âÊÇ·ñÓа´¼ü°´ÏÂ*/
void GetKey(void)
{
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8))
{
Delay(1000000);//È¥¶¶¶¯
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8))
{
while(Bit_RESET == GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)){ ; } //µÈ´ý°´¼üÊÍ·Å
can_tx(0X11,0X33);
lightOn();
}
}
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15))
{
Delay(1000000);//È¥¶¶¶¯//È¥¶¶¶¯
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15))
{
while(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15)){ ; }//µÈ´ý°´¼üÊÍ·Å
can_tx(0X55,0X77);
lightOn();
}
}
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1))
{
Delay(1000000);//È¥¶¶¶¯//È¥¶¶¶¯
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1))
{
while(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1)){ ; }//µÈ´ý°´¼üÊÍ·Å
can_tx(0X99,0Xbb);
lightOn();
}
}
}
int main(void)
{
SystemInit(); //ÉèÖÃϵͳʱÖÓΪ72M
KeyInit(); //°´¼ü¹Ü½Å³õʼ»¯
LED_GPIO_Config();//LED¹Ü½Å³õʼ»¯
CAN_GPIO_Config();//CAN¹Ü½Å³õʼ» 1¯
CAN_NVIC_Configuration(); //CANÖжϳõʼ»¯
CAN_INIT();//CA³õʼ»¯NÄ£¿é
while(1)
{
GetKey(); //¼ì²âÊÇ·ñÓа´¼ü°´ÏÂ
}
}
- led.c
/****************************************
* ÎļþÃû £ºled.c
* ÃèÊö £ºled Ó¦Óú¯Êý¿â
*
* ʵÑéƽ̨£ºMINI STM32¿ª·¢°å »ùÓÚSTM32F103VET6
* Ó²¼þÁ¬½Ó£º-----------------
* | PB14 - LED1 |
* | PB12 - LED2 |
* | PB13 - LED3 |
* -----------------
* ¿â°æ±¾ £ºST3.0.0
*********************************************************/
#include "led.h"
/*************** ÅäÖÃLEDÓõ½µÄI/O¿Ú *******************/
void LED_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); // ʹÄÜPB¶Ë¿ÚʱÖÓ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //³õʼ»¯PB¶Ë¿Ú
GPIO_SetBits(GPIOB, GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14); // ¹Ø±ÕËùÓÐLED
}
- can.c
/****************************************
* ÎļþÃû £ºcan.c
* ÃèÊö £ºCAN²âÊÔÓ¦Óú¯Êý¿â¡£
* ʵÑéƽ̨£ºMINI STM32¿ª·¢°å »ùÓÚSTM32F103VET6
* Ó²¼þÁ¬½Ó£º-----------------
* | |
| PB8-CAN-RX |
* | PB9-CAN-TX |
* | |
* -----------------
* ¿â°æ±¾ £ºST3.0.0
*********************************************************/
#include "can.h"
#include "led.h"
#include "stdio.h"
typedef enum {FAILED = 0, PASSED = !FAILED} TestStatus;
/* ÔÚÖжϴ¦Àíº¯ÊýÖзµ»Ø */
__IO uint32_t ret = 0;
volatile TestStatus TestRx;
/*CAN RX0 ÖжÏÓÅÏȼ¶ÅäÖà */
void CAN_NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
/* enabling interrupt */
NVIC_InitStructure.NVIC_IRQChannel=USB_LP_CAN1_RX0_IRQn;;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*CAN GPIO ºÍʱÖÓÅäÖà */
void CAN_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* ¸´Óù¦ÄܺÍGPIOB¶Ë¿ÚʱÖÓʹÄÜ*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOB, ENABLE);
/* CAN1 Ä£¿éʱÖÓʹÄÜ */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
/* Configure CAN pin: RX */ // PB8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // ÉÏÀÊäÈë
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure CAN pin: TX */ // PB9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // ¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
//#define GPIO_Remap_CAN GPIO_Remap1_CAN1 ±¾ÊµÑéûÓÐÓõ½ÖØÓ³ÉäI/O
GPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);
}
/* CAN³õʼ»¯ */
void CAN_INIT(void)
{
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
// CanTxMsg TxMessage;
/* CAN register init */
CAN_DeInit(CAN1); //½«ÍâÉèCANµÄÈ«²¿¼Ä´æÆ÷ÖØÉèΪȱʡֵ
CAN_StructInit(&CAN_InitStructure);//°ÑCAN_InitStructÖеÄÿһ¸ö²ÎÊý°´È±Ê¡ÖµÌîÈë
/* CAN cell init */
CAN_InitStructure.CAN_TTCM=DISABLE;//ûÓÐʹÄÜʱ¼ä´¥·¢Ä£Ê½
CAN_InitStructure.CAN_ABOM=DISABLE;//ûÓÐʹÄÜ×Ô¶¯ÀëÏß¹ÜÀí
CAN_InitStructure.CAN_AWUM=DISABLE;//ûÓÐʹÄÜ×Ô¶¯»½ÐÑģʽ
CAN_InitStructure.CAN_NART=DISABLE;//ûÓÐʹÄÜ·Ç×Ô¶¯ÖØ´«Ä£Ê½
CAN_InitStructure.CAN_RFLM=DISABLE;//ûÓÐʹÄܽÓÊÕFIFOËø¶¨Ä£Ê½
CAN_InitStructure.CAN_TXFP=DISABLE;//ûÓÐʹÄÜ·¢ËÍFIFOÓÅÏȼ¶
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal;//CANÉèÖÃΪÕý³£Ä£Ê½
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq; //ÖØÐÂͬ²½ÌøÔ¾¿í¶È1¸öʱ¼äµ¥Î»
CAN_InitStructure.CAN_BS1=CAN_BS1_3tq; //ʱ¼ä¶Î1Ϊ3¸öʱ¼äµ¥Î»
CAN_InitStructure.CAN_BS2=CAN_BS2_2tq; //ʱ¼ä¶Î2Ϊ2¸öʱ¼äµ¥Î»
CAN_InitStructure.CAN_Prescaler=60; //ʱ¼äµ¥Î»³¤¶ÈΪ60
CAN_Init(CAN1,&CAN_InitStructure);
//²¨ÌØÂÊΪ£º72M/2/60(1+3+2)=0.1 ¼´100K
/* CAN filter init */
CAN_FilterInitStructure.CAN_FilterNumber=1;//Ö¸¶¨¹ýÂËÆ÷Ϊ1
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//Ö¸¶¨¹ýÂËÆ÷Ϊ±êʶ·ûÆÁ±Îλģʽ
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//¹ýÂËÆ÷λ¿íΪ32λ
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;// ¹ýÂËÆ÷±êʶ·ûµÄ¸ß16λֵ
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;// ¹ýÂËÆ÷±êʶ·ûµÄµÍ16λֵ
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//¹ýÂËÆ÷ÆÁ±Î±êʶ·ûµÄ¸ß16λֵ
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;// ¹ýÂËÆ÷ÆÁ±Î±êʶ·ûµÄµÍ16λֵ
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;// É趨ÁËÖ¸Ïò¹ýÂËÆ÷µÄFIFOΪ0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;// ʹÄܹýÂËÆ÷
CAN_FilterInit(&CAN_FilterInitStructure);// °´ÉÏÃæµÄ²ÎÊý³õʼ»¯¹ýÂËÆ÷
/* CAN FIFO0 message pending interrupt enable */
CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); //ʹÄÜFIFO0ÏûÏ¢¹ÒºÅÖжÏ
}
/* ·¢ËÍÁ½¸ö×Ö½ÚµÄÊý¾Ý*/
void can_tx(u8 Data1,u8 Data2)
{
CanTxMsg TxMessage;
TxMessage.StdId=0x00; //±ê×¼±êʶ·ûΪ0x00
TxMessage.ExtId=0x0000; //À©Õ¹±êʶ·û0x0000
TxMessage.IDE=CAN_ID_EXT;//ʹÓñê×¼±êʶ·û
TxMessage.RTR=CAN_RTR_DATA;//ΪÊý¾ÝÖ¡
TxMessage.DLC=2; // ÏûÏ¢µÄÊý¾Ý³¤¶ÈΪ2¸ö×Ö½Ú
TxMessage.Data[0]=Data1; //µÚÒ»¸ö×Ö½ÚÊý¾Ý
TxMessage.Data[1]=Data2; //µÚ¶þ¸ö×Ö½ÚÊý¾Ý
CAN_Transmit(CAN1,&TxMessage); //·¢ËÍÊý¾Ý
}
void Delay(vu32 nCount)
{
for(; nCount != 0; nCount--);
}
/* USBÖжϺÍCAN½ÓÊÕÖжϷþÎñ³ÌÐò£¬USB¸úCAN¹«ÓÃI/O£¬ÕâÀïÖ»Óõ½CANµÄÖжϡ£ */
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
RxMessage.StdId=0x00;
RxMessage.ExtId=0x00;
RxMessage.IDE=0;
RxMessage.DLC=0;
RxMessage.FMI=0;
RxMessage.Data[0]=0x00;
RxMessage.Data[1]=0x00;
CAN_Receive(CAN1,CAN_FIFO0, &RxMessage); //½ÓÊÕFIFO0ÖеÄÊý¾Ý
if((RxMessage.Data[0]==0x99)&&(RxMessage.Data[1]==0xbb))
// { LED1(0);LED2(1);LED3(1);}
if((RxMessage.Data[0]==0x55)&&(RxMessage.Data[1]==0x77))
{
LED1( ON ); // ÁÁ D3
Delay(0x200000);
LED1( OFF ); // Ãð
LED2( ON ); //D2
Delay(0x200000);
LED2( OFF );
LED3( ON ); //D2
Delay(0x200000);
LED3( OFF );
}
if((RxMessage.Data[0]==0x11)&&(RxMessage.Data[1]==0x33))
//{ LED1(1);LED2(1);LED3(0);}
if((RxMessage.Data[0]==0x66)&&(RxMessage.Data[1]==0x77))
{
LED1( ON ); // ÁÁ D3
Delay(0x1000);
LED1( OFF ); // Ãð
LED2( ON ); //D2
Delay(0x1000);
LED2( OFF );
LED3( ON ); //D2
Delay(0x1000);
LED3( OFF );
}
LED1( ON ); // ÁÁ D3
Delay(0x50000);
LED1( OFF ); // Ãð
LED2( ON ); //D2
Delay(0x100000);
LED2( OFF );
LED3( ON ); //D2
Delay(0x100000);
LED3( OFF );
}
到了这里,关于CAN 设备通讯实验代码+HAL 与原生库分别实现的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!