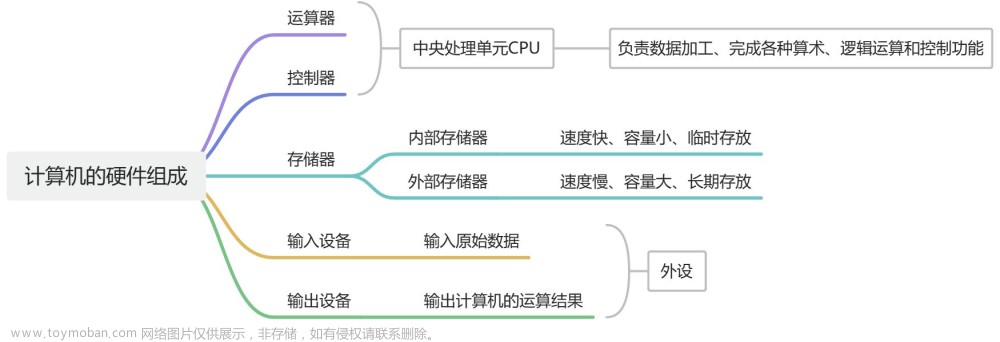
1.早期冯·诺依曼机结构
世界上第一台计算机ENIAC是使用手动接线来控制计算,十分麻烦。
冯·诺依曼提出“存储程序”的概念,是指将指令以二进制代码的形式事先输入计算机的主存储器(内存),然后按照其在存储器中的首地址执行程序的第一条指令,以后就按该程序的规定顺序执行其他指令,直至程序执行结束。
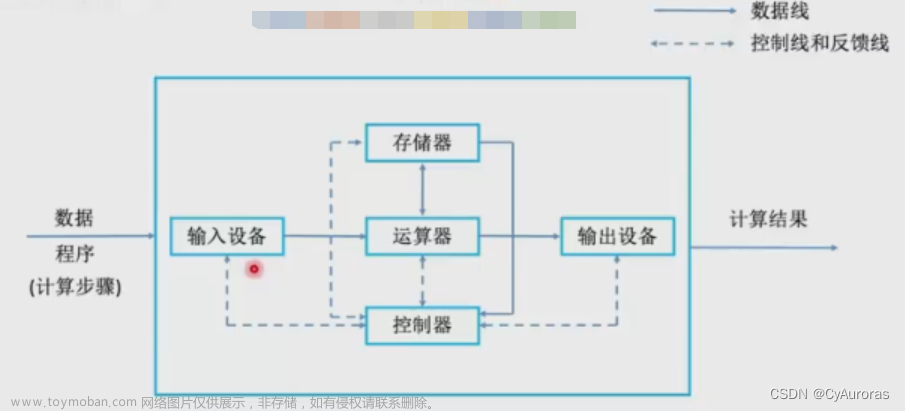
于是第一台采用冯·诺依曼结构的计算机EDVAC诞生了,接下来让我们看看具体的冯·诺依曼计算机结构图(实线为数据线、虚线为控制线或反馈线):

输入设备将信息转化为机器能识别的形式,然后通过运算器的中转存入存储器,需要用到数据和程序时,就要经过运算器中转到输出设备,得出计算结果,而整个过程都是由控制器使用电信号来进行指挥的,另外这个控制器也会负责解析存储器里的存储指令。
另外,对于计算机系统来说,软件和硬件在逻辑上是等效的,例如:可以专门制作出一个乘法硬件(硬件),也可以利用现有的加法硬件实现乘法(软件)
冯·诺依曼计算机的特点:
-
计算机由五大部件组成
-
指令和数据化以同等地位存储在存储器里,可按地址寻址
-
指令和数据使用二进制表示。其中指令组成:操作码(指明指令的操作)、地址码(指明操作数据的内存地址)有的计算机指令采用多个地址码
-
整个体系以运算器为中心,以运算器为中转站,这样会导致数据计算效率降低(比如:输入设备本来是可以直接交给存储器的,但是却交给了运算器)
2.现代计算机体系结构
现代计算机有几个很不一样的特点
-
以存储器为中心
-
通常控制器和运算器被集成为一个
CPU

因此我们可以改写一下结构,让这个体系变得更加模块化:
3.计算机硬件内部结构(现代)
3.1.主存储器
主存储器里用于存放数据的东西叫存储体

-
存储体内部可以分为一个一个“存储单光”,并且根据地址总线进行编址
-
每一个存储单元存储的二进制数据组合我们称为“存储字(
word)” -
存储单元存放二进制的最大长度称为“字长”,一般是8的整数倍。
-
用于存储二进制的电子元件简称“存储元”,利用电容的原理,每个存储元可存
1bit,而存储单元由若干个存储元构成
主存储器内部还有两个寄存器
-
分别是
MAR(存储地址寄存器)、MDR(存储数据寄存器) -
主存储器里的控制逻辑会根据
MAR存储的地址查找主存储器里的数据,然后取出存放到MDR中,而CPU就可以从这里拿走数据。 -
同理,
CPU写入主存储器的方式也和读取类似:CPU想要写入的对应地址放在MAR里,想要写入的数据放在MDR里,最后通过控制总线告诉主存储器本次为写操作。
MAR是里有指向存储单元的地址,因此MAR反映存储单元的个数
MDR是有由要存储到MAR指向地址的数据内容,反映存储单元的存储字长
3.2.运算器
运算器是用于实现算术运算和逻辑运算的,内部有:
-
ACC累加器:实际是一个寄存器,用于存放操作数或运算结果 -
MQ乘商寄存器:在乘、除运算的时候,用于存放操作数或运算结果 -
X通用寄存器:通用的操作数寄存器,用于存放操作数 -
ALU算术逻辑单元:通过内部复杂的电路实现算术运算、逻辑运算,是运算器的核心部件,制作成本也是最高的。
| 加 | 减 | 乘 | 除 | |
|---|---|---|---|---|
ACC |
被加数、和 | 被减数、差 | 乘积高位 | 被除数、余数 |
MQ |
乘数、乘积低位 | |||
X |
加数 | 减数 | 被乘数 | 除数 |

乘积的高位表示了乘法结果的较高位数部分,而乘积的低位表示了较低位数部分。
3.3.控制器
控制器内部有:
-
CU控制单元(Control Unit):分析指令,给出控制信号,内部有很复杂的电路,是控制器内最核心的部件 -
IR指令寄存器(Instruction Register):本质是一个寄存器,存放当前执行的指令 -
PC程序计数器(Program Counter):本质是一个寄存器,存放下一条指令地址,有自动+1的功能

在控制器内部的工作逻辑是:PC取得指令->IR分析指令->CU执行指令,前面两个过程为“取指阶段”,后面一个过程为“执行阶段”
4.计算机硬件协调流程(现代)
下面是高级语言C语言的一段代码:
int a = 2, b = 3, c = 1, y = 0;
int main()
{
y = a * b + c;
return 0;
}
接下来让我们看看这段代码在计算机硬件中运作流程:

4.1.执行指令0
-
(PC)=0,(PC)++:CPU内部的PC存储的是下一条指令的地址,因此PC=0,即:PC存储了第一条指令的代码地址,在执行后续的步骤后PC自动+1(PC是程序计时器,可以存放下一条指令地址,有自动+1的功能) -
(PC)->MAR,(MAR)=0,(MAR)->存储体->MDR,(MDR)=0000 01|00 0000 0101:PC将指令地址交给MAR,MAR通过这个指令地址在存储体内部查找指令数据,存储到MDR中 -
(MDR)->IR:从MDR得到的指令数据存放到IR中(IR负责存放当前执行的指令) -
(IR)->CU,(IR)->MAR,(MAR)->存储体->MDR,(MDR)=0000 0000 0000 0010=2:而在当前要执行的指令中,前六位0000 01操作码会被送到CU分析,得知这是“取数d到ACC”的命令,后10位代表这个数的地址在主存储器存储体的5处。因此IR把后续的10位交给MAR,MAR再去存储体内找主存地址5处的a的数据0000 0000 0000 0010=2存入MDR中(CU控制单元负责分析指令,给出控制信号) -
(MDR)->ACC:因此0000 0000 0000 0010=2被拷贝到IR内部,然后CU控制MDR送到ACC里
4.2.执行指令1
根据“4.1.执行指令0”中的步骤1,OP(PC)=1,(ACC)=2,然后就会发生:
-
(PC)=1,(PC)->MAR,(MAR)=1,(MAR)->存储体->MDR,(MDR)=0000 01|00 0000 0101,(PC)++:PC内部存储了当前要第二条指令的地址,在执行了后续的步骤了+1,然后MAR得到的指令地址是“1”,传递给MAR后,MAR在存储体中找到指令0000 01|00 0000 0101 -
(MDR)->IR,(IR)->CU,(IR)->MAR,(MAR)->存储体->MDR,(MDR)=0000 0000 0000 0011=3:接下来MDR将内部的指令传给IR,IR交给CU分析后得知前六位0001 00为“乘法操作,将ab并且存储到ACC中” ,后10位00 0000 0101为操作数地址,于是这个地址就被IP传给MAR在存储体中找到并且存储给MDR -
(MDR)->MQ,(MQ)=0000 0000 0000 0011=3:接下来CU控制MDR内部的数据拷贝到MQ(MQ乘商寄存器:在乘、除运算的时候,用于存放操作数或运算结果,这里是存储了乘数b) -
(ACC)->X,(X)=0000 0000 0000 0010=2,ALU->(X)*(MQ)->ACC,(ACC)=6:CU控制ACC里的值拷贝到通用寄存器X里,然后控制ALU把通用寄存器X里的值和乘商寄存器MQ里的值相乘,然后存储到ACC中(如果乘积太大,MQ也会辅助存储,存储的是乘积低位,ACC那边则是乘积高位)
4.3.执行指令2
根据“4.2.执行指令1”中的步骤1,OP(PC)=2,(ACC)=6,然后就会发生:
-
(PC)->MAR,(MAR)=2,(MAR)->存储体->MDR,(MDR)=0000 11|0000 0000 0000 0111,(PC)++:PC将指令地址拷贝给MAR,MAR在存储体内查找到指令,拷贝给MDR,然后PC内部的计时器+1,存储了指向下一条指令的地址 -
(MDR)->IR,(IR)->CU,(IR)->MAR,(MAR)=0000 0000 0000 0111=7,(MAR)->存储体->MDR,MDR=0000 0000 0000 0001=1:MDR内部的指令值拷贝给IR,IR传递给CU分析指令,得知0000 11为“加法指令ab+c,并且最终存储在ACC中”,于是CU控制IR剩下的0000 0000 0000 0111,传递给MAR,MAR在存储体内找到指令数据0000 0000 0000 0001,传递给MDR -
(MDR)->X,(x)=0000 0000 0000 0001=1,ALU->(ACC)+(X)->ACC:然后MDR将内部数据拷贝到通用寄存器X内,接下来控制单元CU向ALU发生信号,让X和ACC里的值相加,最后存储到ACC内部
4.4.执行指令3
根据“4.3.执行指令3”中的步骤1,OP(PC)=3,(ACC)=7,然后就会发生:
-
(PC)->MAR,(MAR)=3,(MAR)->存储体->MDR,(MDR)=0000 10|0000 0000 0000 1000,(PC)++ -
(MDR)->IR,(IR)->CU,(IR)->MAR,(MAR)=0000 0000 0000 1000=8,(MAR)->存储体->MDR,MDR=0000 0000 0000 0000=0 -
(ACC)=7,(ACC)->MDR,(MDR)=7,(MAR)=0000 0000 0000 1000=8:这里就有个地方需要注意,CU控制了ACC寄存器的值拷贝到MDR,此时MAR也有y变量的主存地址,此时CU再控制MAR和MDR把ab+c存入y中文章来源:https://www.toymoban.com/news/detail-619982.html
4.5.执行指令4
根据“4.4.执行指令4”中的步骤1,OP(PC)=4,然后像上面一样类似的流程,取得000110停机指令,接下来就会执行操作系统的相关指令了,这后面的我们不再讨论。文章来源地址https://www.toymoban.com/news/detail-619982.html
到了这里,关于计算机基本硬件的内部结构的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!