Golang 中的 map 详解
一、什么是 map?
1、map 的定义
在计算机科学里,被称为相关数组、map、符号表或者字典,是由一组 <key, value> 对组成的抽象数据结构,并且同一个 key 只会出现一次。
两个关键点:map 是由 key-value 对组成的;key 只会出现一次。
map 的设计也被称为 “The dictionary problem(字典问题)”,它的任务是设计一种数据结构用来维护一个集合的数据,并且可以同时对集合进行增删查改的操作。
2、map 的数据结构
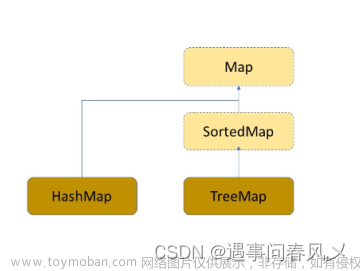
最主要的数据结构有两种:哈希查找表(Hash table)、搜索树(Search tree)。
-
哈希查找表(Hash table)
哈希查找表使用哈希函数将 key 分配到不同的桶(bucket,也就是数组的不同 index),开销主要在哈希函数的计算以及数组的常数访问时间,在很多场景下,哈希查找表的性能很高。 -
搜索树(Search tree)
搜索树一般采用自平衡搜索树,包括:AVL 树,红黑树。
哈希查找表的平均查找效率是 O(1),最差是 O(N),如果哈希函数设计的很好,最坏的情况基本不会出现。自平衡搜索树法的最差搜索效率是 O(logN)。遍历自平衡搜索树,返回的 key 序列,一般会按照从小到大的顺序;而哈希查找表则是乱序的。
二、Golang 中 map 的类型
Golang 中 map 是一个指针,占用 8 个字节。当使用 make 创建 map 时,底层调用的是 makemap() 函数,makemap() 函数返回的是一个指针,因为返回的是指针,所以 map 作为参数的时候,函数内部能修改map。
func makemap(t *maptype, hint int, h *hmap) *hmap {}
三、map 的底层实现
源码位于 src\runtime\map.go 中。
golang 中 map 底层使用的是哈希查找表,用链表来解决哈希冲突。每个 map 的底层结构是 hmap,是由若干个结构为 bmap 的 bucket 组成的数组,每个 bucket 底层都采用链表结构。
hmap 的结构:
type hmap struct {
count int // map中元素的数量,调用len()直接返回此值
flags uint8 // 状态标识符,key和value是否包指针、是否正在扩容、是否已经被迭代
B uint8 // map中桶数组的数量,桶数组的长度的对数,len(buckets) == 2^B,可以最多容纳 6.5 * 2 ^ B 个元素,6.5为装载因子
noverflow uint16 // 溢出桶的大概数量,当B小于16时是准确值,大于等于16时是大概的值
hash0 uint32 // 哈希种子,用于计算哈希值,为哈希函数的结果引入一定的随机性
buckets unsafe.Pointer // 指向桶数组的指针,长度为 2^B ,如果元素个数为0,就为 nil
oldbuckets unsafe.Pointer // 指向一个旧桶数组,用于扩容,它的长度是当前桶数组的一半
nevacuate uintptr // 搬迁进度,小于此地址的桶数组迁移完成
extra *mapextra // 可选字段,用于gc,指向所有的溢出桶,避免gc时扫描整个map,仅扫描所有溢出桶就足够了
}
// 溢出桶结构
type mapextra struct {
overflow *[]*bmap // 指针数组,指向所有溢出桶
oldoverflow *[]*bmap // 指针数组,发生扩容时,指向所有旧的溢出桶
nextOverflow *bmap // 指向所有溢出桶中下一个可以使用的溢出桶
}
bmap的结构:
type bmap struct {
tophash [bucketCnt]uint8 // bucketCnt=8,// 存放key哈希值的高8位,用于决定kv键值对放在桶内的哪个位置
}
//实际上编辑期间会动态生成一个新的结构体
type bmap struct {
topbits [8]uint8 // 存放key哈希值的高8位,用于决定kv键值对放在桶内的哪个位置
keys [8]keytype // 存放key的数组
values [8]valuetype // 存放value的数组
pad uintptr // 用于对齐内存
overflow uintptr // 指向下一个桶,即溢出桶,拉链法
}
buckets是一个bmap数组,数组的长度就是 2^B。每个bucket固定包含8个key和value,实现上面是一个固定的大小连续内存块,分成四部分:tophash 值,8个key值,8个value值,指向下个bucket的指针。
tophash 值用于快速查找key是否在该bucket中,当插入和查询运行时都会使用哈希哈数对key做哈希运算,获取一个hashcode,取高8位存放在bmap tophash字段中。
桶里面会最多装 8 个 key,这些 key 之所以会落入同一个桶,是因为它们经过哈希计算后,哈希结果是“一类”的。在桶内,又会根据 key 计算出来的 hash 值的高 8 位来决定 key 到底落入桶内的哪个位置(一个桶内最多有8个位置)。
如图,B=5 表示hmap的有2^5=32个bmap,buckets是一个bmap数组,其长度为32,每个bmap有8个key。

桶结构的很多字段得在编译时才会动态生成,比如key和values等
桶结构中,之所以所有的key放一起,所有的value放一起,而不是key/value一对对的一起存放,目的便是在某些情况下可以省去pad字段,节省内存空间。由于内存对齐的原因,key0/value0/key1/value1… 这样的形式可能需要更多的补齐空间,比如 map[int64]int8 ,1字节的value后面需要补齐7个字节才能保证下一个key是 int64 对齐的。
golang中的map使用的内存是不会收缩的,只会越用越多。
每个 bucket 设计成最多只能放 8 个 key-value 对,如果有第 9 个 key-value 落入当前的 bucket,那就需要再构建一个溢出桶 bucket ,通过 overflow 指针连接起来。
四、map 的扩容
1、装载因子(平均每个桶存储的元素个数)
Go的装载因子阈值常量:6.5,map 最多可容纳 6.5*2^B 个元素。
装载因子等于 map中元素的个数 / map的容量,即len(map) / 2^B。装载因子用来表示空闲位置的情况,装载因子越大,表明空闲位置越少,冲突也越多。随着装载因子的增大,哈希表线性探测的平均用时就会增加,这会影响哈希表的性能,当装载因子大于70%,哈希表的性能就会急剧下降,当装载因子达到100%,整个哈希表就会完全失效,这个时候,查找和插入任意元素的复杂度都是O(N),因为需要遍历所有元素。
另外装载因子与扩容、迁移等重新散列(rehash) 行为有直接关系:
- 在程序运行时,会不断地进行插入、删除等,会导致 bucket 不均,内存利用率低,需要迁移。
- 在程序运行时,出现装载因子过大,需要做扩容,解决 bucket 过大的问题。
为什么装载因子是6.5?不是8?不是1?
装载因子是哈希表中的一个重要指标,主要目的是为了平衡 buckets 的存储空间大小和查找元素时的性能高低。实际上这是 Go 官方的经过认真的测试得出的数字,一起来看看官方的这份测试报告。包含四个指标:
- loadFactor:负载因子,也叫装载因子;
- %overflow:溢出率,有溢出 bukcet 的百分比;
- bytes/entry:平均每对 key/alue 的开销字节数;
- hitprobe:查找一个存在的 key 时,要查找的平均个数;
- missprobe:查找一个不存在的 key 时,要查找的平均个数。
Go 官方发现:装载因子越大,填入的元素越多,空间利用率就越高,但发生冲突的几率就变大;反之,装数因子越小,填入的元素越少,冲突发生的几率减小,但空间利用率低,而且还会提高扩容操作的次数。
根据这份测试结果和讨论,Go 官方取了一个相对适中的值,把 Go 中的 map 的负数因子硬编码为 6.5,这就是 6.5 的选择缘由。这意味着在 Go 语言中,当 map存储的元素个数大于或等于 6.5*桶个数 时,就会发扩容行为。
2、触发 map 扩容的时机(插入、删除key)
- 当装载因子超过6.5时,扩容一倍,属于增量扩容;
- 当使用的溢出桶过多时,重新分配一样大的内存空间,属于等量扩容;
(实际上没有扩容,主要是为了回收空闲的溢出桶,节省空间,提高 map 的查找和插入效率)
为什么会出现这种情况?
这种情况可能是因为map删除的特性导致的。当我们不断向哈希表中插入数据,并且将他们又全部删除时,其内存占用并不会减少,因为删除只是将桶对应位置的tophash置nil而已。
这种情况下,就会不断的积累溢出桶造成内存泄露,为了解决这种情况,采用了等量扩容的机制,一旦哈希表中出现了过多的溢出桶,会创建新桶保存数据,gc会清理掉老的溢出桶,从而避免内存泄露。
如何定义溢出桶是否太多需要等量扩容呢?两种情况:
- 当B小于15时,溢出桶的数量超过2^B,属于溢出桶数量太多,需要等量扩容;
- 当B大于等于15时,溢出桶数量超过2^15,属于溢出桶数量太多,需要等量扩容。
3、扩容策略(怎么扩容?)
Go 会创建一个新的 buckets 数组,新的 buckets 数组的容量是旧buckets数组的两倍(或者和旧桶容量相同),将原始桶数组中的所有元素重新散列到新的桶数组中。这样做的目的是为了使每个桶中的元素数量尽可能平均分布,以提高查询效率。旧的buckets数组不会被直接删除,而是会把原来对旧数组的引用去掉,让GC来清除内存。
在map进行扩容迁移的期间,不会触发第二次扩容。只有在前一个扩容迁移工作完成后,map才能进行下一次扩容操作。
4、搬迁策略
由于map扩容需要将原有的kv键值对搬迁到新的内存地址,如果一下子全部搬完,会非常的影响性能。go 中 map 的扩容采用渐进式的搬迁策略,原有的 key 并不会一次性搬迁完毕,一次性搬迁会造成比较大的延时,每次最多只会搬迁 2 个 bucket,将搬迁的O(N)开销均摊到O(1)的赋值和删除操作上。
上面说的 hashGrow() 函数实际上并没有真正地“搬迁”,它只是分配好了新的 buckets,并将老的 buckets 挂到了 oldbuckets 字段上。真正搬迁 buckets 的动作在 growWork() 函数中,而调用 growWork() 函数的动作是在 mapassign 和 mapdelete 函数中。也就是插入或修改、删除 key 的时候,都会尝试进行搬迁 buckets 的工作。先检查 oldbuckets 是否搬迁完毕,具体来说就是检查 oldbuckets 是否为 nil。
五、解决哈希冲突
1、开放寻址法
如果发生哈希冲突,从发生冲突的那个单元起,按一定的次序,不断重复,从哈希表中寻找一个空闲的单元,将该键值对存储在该单元中。具体的实现方式包括线性探测法、平方探测法、随机探测法和双重哈希法等。开放寻址法需要的表长度要大于等于所需要存放的元素数量。文章来源:https://www.toymoban.com/news/detail-620002.html
2、链地址法
基于数组 + 链表 实现哈希表,数组中每个元素都是一个链表,将每个桶都指向一个链表,当哈希冲突发生时,新的键值对会按顺序添加到该桶对应的链表的尾部。在查找特定键值对时,可以遍历该链表以查找与之匹配的键值对。文章来源地址https://www.toymoban.com/news/detail-620002.html
3、两种方案的比较
- 内存利用率
对于链地址法,基于 数组 + 链表 进行存储,链表节点可以在需要时再创建,开放寻址法需要事先申请好足够内存,因此链地址法对内存的利用率高。 - 适用场景
链地址法对装载因子的容忍度会更高,适合存储大对象、大数据量的哈希表,而且相较于开放寻址法,它更加灵活,支持更多的优化策略,比如可采用红黑树代替链表。但是链地址法需要额外的空间来存储指针。
对于开放寻址法,它只有数组一种数据结构就可完成存储,继承了数组的优点,对CPU缓存友好,易于序列化操作,但是它对内存的利用率不高,且发生冲突时代价更高。当数据量明确、装载因子小,适合采用开放寻址法。
到了这里,关于Golang 中的 map 详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!