已经在研一度过快3个月了,研究生学习跟本科学习还是有很大区别的,要善于自己找资料善于自己总结,因此我也决定从现在开始时不时的写写博客总结后面每段时间遇到的各种困难以及解决方法,为以后工作积累经验也方便以后查阅。
这是我第一篇博客,之前都是在做关于树莓派和opencv的项目,前段时间老师也是给了我一个新项目的思路,也是要基于视觉处理的,但因为21年电赛刚过有些学弟在比赛时都用到了openmv,所以我也想试试用openmv来处理处理手上这个项目,也顺便重新认识认识老朋友stm32。
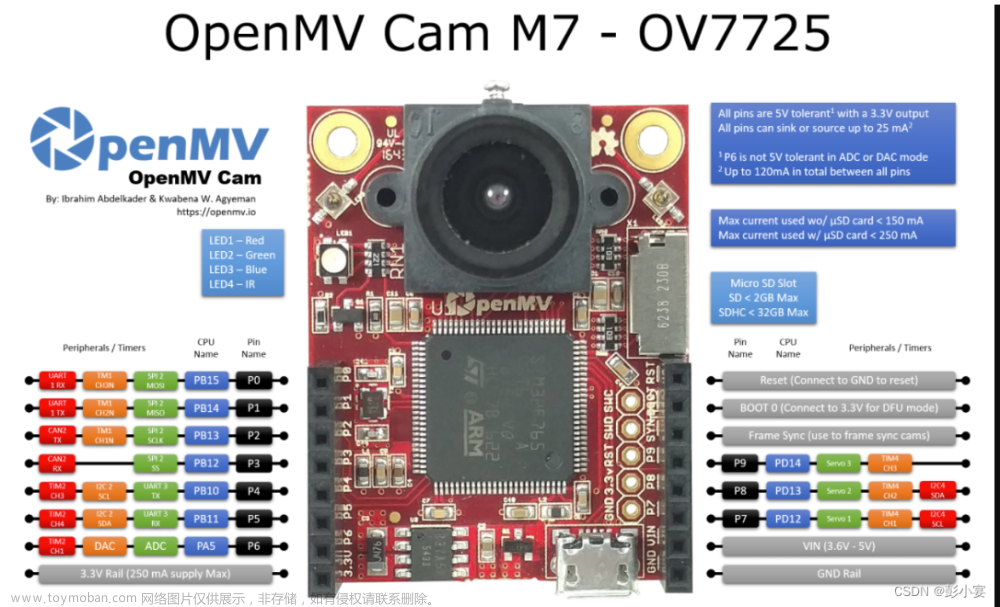
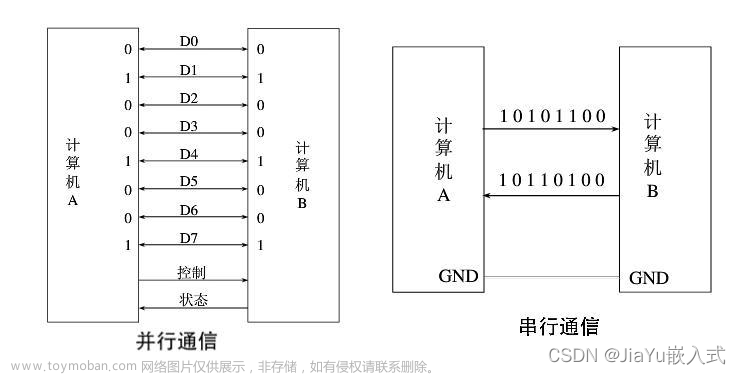
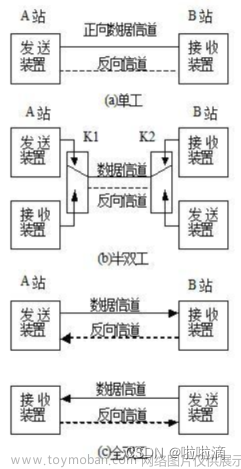
言归正传,基于openmv的图像处理可以说是非常简单的,官方给了各种库,但凡好好看看例子都能会用,但是openmv的引脚太少了以至于能实现的功能太单一,所以这时候openmv也就只能作为传感器,大多数功能还得靠stm32,既然openmv作为传感器,所以openmv与stm32之间必须实现通信,方式很多很多,我选择了最基础的串口通信。
虽然本科也干了不少STM32与各类传感器的通信,但这次依碰到一些小麻烦,在网上查了不少资料,但怎么说了要么就是给的代码不全不知道上下的联系,要么就是单纯在那讲STM32的串口通信跟题目根本不搭噶。
废话少说,直接边上代码边总结。(之前记得将openmv的P4接到stm32的PA10,P5接到PA9)
关于openmv的代码:
# Blob Detection and uart transport
import sensor, image, time,math
from pyb import UART
import json
# For color tracking to work really well you should ideally be in a very, very,
# very, controlled enviroment where the lighting is constant...
yellow_threshold = (65, 100, -10, 6, 24, 51)
# You may need to tweak the above settings for tracking green things...
# Select an area in the Framebuffer to copy the color settings.
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
uart = UART(3, 115200)
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
while(True):
img = sensor.snapshot() # Take a picture and return the image.
blobs = img.find_blobs([yellow_threshold])
img_data=bytearray([0x2C,7,1,2,3,4,0X5B])
uart.write(img_data)这段代码原型是官方的寻找最大色块的代码,只是拿来简单做一下串口传输数据,因此删掉很多,核心成分在最后两行,其中要注意的是,用到了bytearry(),所以在开头要import math,其中第0位为开始标志,最后一位为结束标志,第1位为总位数7,其他为要传输的数据。
关于stm32的代码:
(1)usart.c
#include "sys.h"
#include "usart.h"
#include "openmv.h"
#include "lcd.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
//USART_ClearFlag(USART1, USART_FLAG_TC);
#if EN_USART1_RX
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
#endif
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
Openmv_Receive_Data(Res);
Openmv_Data();
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
(2)usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "stm32f4xx_conf.h"
#include "sys.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
#endif采用的是官方已经包含的串口代码,但凡用过stm32的都有这段代码,只是在Res =USART_ReceiveData(USART1)后面增加了两行关于openmv的函数。
(3)openmv.c
#include "openmv.h"
#include "usart.h"
int openmv[7];//stm32接收数据数组
int16_t data1;
int16_t data2;
int16_t data3;
int16_t data4;
int i=0;
void Openmv_Receive_Data(int16_t data)//接收Openmv传过来的数据
{
static u8 state = 0;
if(state==0&&data==0x2C)
{
state=1;
openmv[0]=data;
}
else if(state==1&&data==7)
{
state=2;
openmv[1]=data;
}
else if(state==2)
{
state=3;
openmv[2]=data;
}
else if(state==3)
{
state = 4;
openmv[3]=data;
}
else if(state==4)
{
state = 5;
openmv[4]=data;
}
else if(state==5)
{
state = 6;
openmv[5]=data;
}
else if(state==6) //检测是否接受到结束标志
{
if(data == 0x5B)
{
state = 0;
openmv[6]=data;
Openmv_Data();
}
else if(data != 0x5B)
{
state = 0;
for(i=0;i<7;i++)
{
openmv[i]=0x00;
}
}
}
else
{
state = 0;
for(i=0;i<7;i++)
{
openmv[i]=0x00;
}
}
}
void Openmv_Data(void)
{
data1=openmv[0];
data2=openmv[3];
data3=openmv[4];
data4=openmv[5];
}
(4)openmv.h
#include "sys.h"
extern int openmv[7];//stm32接收数据数组
extern int16_t data1;
extern int16_t data2;
extern int16_t data3;
extern int16_t data4;
void Openmv_Receive_Data(int16_t data);
void Openmv_Data(void);(5)main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "lcd.h"
#include "openmv.h"
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //初始化延时函数
uart_init(115200); //初始化串口波特率为115200
LED_Init(); //初始化LED
LCD_Init(); //初始化LCD FSMC接口
POINT_COLOR=RED; //画笔颜色:红色
while(1)
{
LCD_ShowNum(0,20,200,10,24);
LCD_ShowNum(0,40,data1,10,24);
}
}
其中openmv[7]中的7与openmv代码中的bytearry()的总位数相同。
然后下载代码,可以在lcd显示屏上看到结果(lcd显示屏代码就不贴了,官方资料很详细)。
 文章来源:https://www.toymoban.com/news/detail-620290.html
文章来源:https://www.toymoban.com/news/detail-620290.html
文章来源地址https://www.toymoban.com/news/detail-620290.html
到了这里,关于关于openmv与stm32之间的串口通信实现的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!