声明:
最近想做一个K210数字识别和寻迹,方便完成2021年电赛F题,完成了数字训练和脱机运行就想赶紧进行一次通信,调了好几天(郁闷+自闭几天),按照官方的历程看,配置的没问题但是会一直出现乱码,得不到自己想要的数据,所以准备发一下这个文章,希望帮助一下道友。
代码部分:
import sensor, image, lcd, time
import KPU as kpu
import gc, sys
import ustruct
from fpioa_manager import fm
from machine import UART
# need your connect hardware IO 10/11 to loopback
fm.register(5, fm.fpioa.UART1_TX, force=True)
fm.register(4, fm.fpioa.UART1_RX, force=True)
uart = UART(UART.UART1, 115200, 8, 1, 0, timeout=1000, read_buf_len=4096)
#你想发的数据
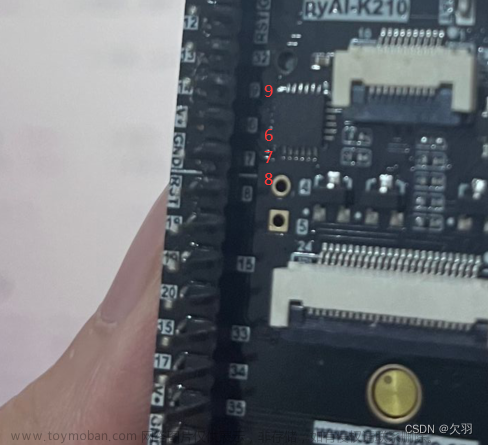
uart.write('4')这里简单说一下总结:之前之所以乱码其实就是因为,K210可以使用映射管脚进行配置RX和TX,如果自己映射使用就会出现乱码,得不到数据。所以要查看K210原理图,找到K210自己系统的RX和TX直接进行配置!就会得到自己想要的数据。
硬件连接
硬件部分就很简单,准备:一个USB转TTL,3根杜邦线,K210的RX接USB转TTL的TX,K210的TX接TTL的RX,3.3V电压可以不接,但是一定要共同接GND,这样就硬件完成。
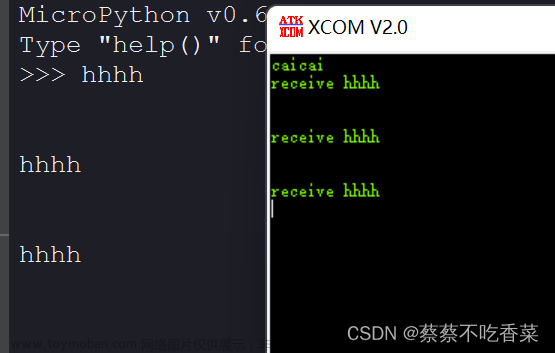
这里其实还有一个坑,通过MAIXPY的代码上传到K210的内置FLASH之后,让K210脱机运行(K210的串口要进行数据传输,别让他占用)然后进行数字识别,进行发送数据。 文章来源:https://www.toymoban.com/news/detail-621901.html
总结:
一开始的问题就一直找不到,查了很多资料有的说需要打包函数,其实不用。然后就是映射管脚的问题,很难发现。最后还是朋友找到了之前做过这个项目的好学长让看看原理图,才找到问题。还有就是一定要脱机运行。之前就是USB转TTL之后的串口 com5 连接到串口助手,其实这是错的,用K210占用的com4 让K210脱机运行,com4空闲,然后连接到串口助手,就可以接受数据。文章来源地址https://www.toymoban.com/news/detail-621901.html
希望可以帮助到有共同需要的道友。(不得不说K210的资料是真的少)。
到了这里,关于K210和STM32串口通信(亲测有效)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!