💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码及数据
💥1 概述
基于UKF和AUKF的电力系统负荷存在突变时的三相状态估计研究是一种利用无迹卡尔曼滤波(Unscented Kalman Filter, UKF)和改进的无迹卡尔曼滤波(Augmented Unscented Kalman Filter, AUKF)方法来处理电力系统负荷突变情况下的状态估计问题。
在电力系统中,负荷突变是指电力系统的负荷发生突然变化,可能会对电压、频率等三相状态变量产生影响。因此,在负荷突变情况下,对三相状态进行实时估计和预测非常重要,来保证电力系统的稳定运行和负荷管理。
UKF是一种无迹卡尔曼滤波算法,可以应对非线性系统和非高斯噪声的情况。它通过选择一组特定的采样点(无迹)来对高斯分布进行逼近,提高了滤波算法的准确性和稳定性。
AUKF是对UKF的改进,通过引入状态扩展和增广噪声向量,提高了滤波算法对系统噪声和突变的鲁棒性。对于电力系统负荷突变的情况,AUKF能够准确估计负荷突变后的状态变量,并尽可能减小估计误差。
基于UKF和AUKF的电力系统负荷突变时的三相状态估计研究可以包括以下内容:
1. 状态建模:建立电力系统的状态方程,将电力系统的负荷变化和状态变量联系起来。考虑负荷突变对电力系统的影响,细化负荷模型,包括各个负荷的特性和突变情况。
2. 观测模型:确定观测方程,将电力系统负荷突变后的实时测量数据与状态变量相关联。这些测量数据可能包括电压、频率等信息。
3. 无迹卡尔曼滤波:利用UKF或AUKF算法进行状态估计,根据测量数据和系统模型,通过递推方式更新和估计电力系统的三相状态变量,并考虑负荷突变的影响。
4. 突变检测:设计突变检测算法,通过对估计误差和测量噪声的分析,检测负荷突变的发生,并及时对滤波算法进行调整和校正。
5. 算法优化:对滤波算法的参数进行优化调整,如调整采样点和权重,以提高滤波算法对负荷突变的敏感性和准确性。
通过基于UKF和AUKF的研究,可以实现对电力系统负荷存在突变时的三相状态进行实时估计和预测。这有助于保证电力系统的安全运行,并提供有效的负荷管理策略。但需要注意,具体的研究需要针对实际电力系统的特点和负荷突变情况进行进一步优化和改进。
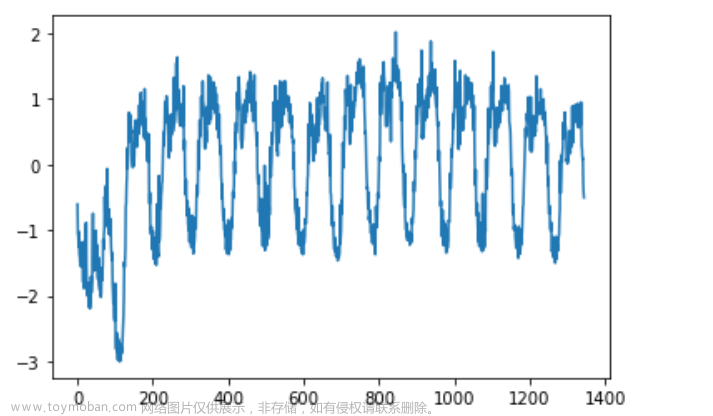
📚2 运行结果






🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王萍,弓清瑞,程泽等.基于AUKF的锂离子电池SOC估计方法[J].汽车工程,2022,44(07):1080-1087.DOI:10.19562/j.chinasae.qcgc.2022.07.014.文章来源:https://www.toymoban.com/news/detail-622017.html
[2]巫春玲,程琰清,徐先峰等.基于蒙特卡洛和SH-AUKF算法的锂电池SOC估计[J].电气工程学报,2022,17(03):66-75.文章来源地址https://www.toymoban.com/news/detail-622017.html
🌈4 Matlab代码及数据
到了这里,关于【状态估计】基于UKF、AUKF的电力系统负荷存在突变时的三相状态估计研究(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!