第一章:K210 介绍
K210芯片是一款基于RISC-V架构的嵌入式人工智能芯片,具备低功耗、高性能的特点。它拥有强大的图像处理和机器学习能力,适用于边缘计算设备和物联网应用。为了方便开发者,K210芯片提供了丰富的外设接口,包括摄像头接口、显示接口、WiFi、蓝牙等,同时支持多种编程语言和开发环境,如MicroPython和C语言。在计算机视觉领域,K210芯片被广泛应用于对象检测、人脸识别、图像分类等任务,能够实现快速的图像处理和分析。
K210 官网
第二章:矩形识别的基本原理
矩形识别是计算机视觉领域中常见的任务之一,它主要涉及图像处理和机器学习算法。
-
对于图像的预处理,可以根据具体需求选择合适的方法进行降噪、分辨率调整和对比度增强等操作。例如,可以使用滤波器进行降噪,使用插值算法进行分辨率调整,使用直方图均衡化进行对比度增强。
-
特征提取阶段需要根据具体的矩形特征进行选择合适的方法。边缘检测算法可以帮助找到图像中的边界信息,常用的算法包括Sobel算子和Canny边缘检测算法。直线检测可以使用Hough变换来识别直线,而角点检测算法可以使用Harris角点检测或Shi-Tomasi角点检测等方法。
-
矩形检测阶段可以使用霍夫变换或其他算法来检测图像中的矩形。霍夫变换可以通过累加直线参数来找到直线,进一步组合成矩形。也可以使用基于角点特征的方法,例如使用RANSAC算法来拟合矩形模型。还可以结合机器学习算法,如基于深度学习的目标检测方法,来实现矩形检测。
-
矩形定位可以通过计算矩形的边界框或角点坐标来实现。根据具体需求,可以选择不同的方式表示矩形的位置和大小,例如使用左上角和右下角坐标、中心点和宽高等。
-
矩形识别应用广泛,根据具体场景和需求,可以进行目标检测、边缘检测等任务。例如,在自动驾驶中,矩形识别可以帮助车辆识别道路的边界和交通标志;在工业领域,矩形识别可以用于产品的质量检测和生产线的自动控制。此外,矩形识别还可以应用于机器人视觉、安防监控等领域。
第三章:图像预处理与特征提取
在矩形识别任务中,图像预处理和特征提取是非常关键的步骤。
3.1 图像采集与传输
在进行图像预处理和特征提取之前,需要先将图像从 K210 开发板采集并传输到计算机上进行处理。可以通过连接相机模块或者摄像头到 K210 开发板来实现。
3.2 图像预处理
图像预处理旨在提高图像质量,减少后续处理过程中的噪声和干扰。以下是一些常见的图像预处理方法:
- 降噪:使用滤波器(如高斯滤波器)对图像进行平滑处理,去除图像中的噪声。
- 阈值处理:使用阈值对图像进行处理,选取需要的区域。
- 对比度增强:通过直方图均衡等方法增强图像的对比度,使得图像中的信息更加明显。
- 光照校正:对图像的亮度进行调整,使得图像中的目标更加清晰可见。
3.3 特征提取
特征提取是矩形识别中的关键步骤,它从图像中提取出与矩形相关的特征信息。以下是几种常用的特征提取方法:
- 边缘检测:边缘是图像中物体之间的界限,通过使用边缘检测算法(如Canny算法、Sobel算法等),可以找到图像中的边缘信息。
- 直线检测:直线是矩形的基本组成部分,通过使用直线检测算法(如霍夫变换),可以找到图像中的直线段。
- 角点检测:角点是矩形的关键特征点,通过使用角点检测算法(如Harris角点检测、FAST角点检测等),可以找到图像中的角点位置。
这些提取到的特征可以作为后续矩形检测和定位的输入,帮助我们准确定位和识别图像中的矩形目标。
第四章:矩形检测与定位
在矩形识别任务中,矩形检测与定位是核心步骤之一。
4.1 矩形检测算法
矩形检测算法旨在从图像中找到可能的矩形目标。以下是几种常用的矩形检测算法:
- 霍夫变换:霍夫变换是一种常用的图像处理技术,可以用于检测直线和其他形状。在矩形检测中,可通过霍夫变换检测图像中的直线,并根据直线之间的关系推断出可能的矩形。
- 边缘连接:边缘连接是一种基于边缘信息的矩形检测方法。它通过将相邻的边缘线段进行连接,形成更大的轮廓,然后根据轮廓的形状和特征进行矩形的筛选。
- 模板匹配:模板匹配是一种基于图像相似度的矩形检测方法。它先使用一个预定义的矩形模板,在图像中进行滑动窗口式的匹配,找出与模板最相似的位置,从而检测出可能的矩形。
4.2 矩形定位
矩形定位是在检测到可能的矩形后,精确定位和判断矩形的位置和大小,以下是几种常用的矩形定位方法:
- 最小外接矩形:通过计算轮廓的最小外接矩形来定位矩形。最小外接矩形是能够完全包围住轮廓,并且具有最小面积的矩形。
- 长宽比筛选:根据矩形的长宽比进行筛选,排除不符合要求的矩形。例如,可以设定一个阈值,只保留长宽比接近于1的矩形。
- 角度筛选:检测矩形四条边的角度,排除角度不在一定范围内的矩形。例如,可以设定一个阈值,只保留角度接近于90度的矩形。
这些矩形检测和定位的方法可以根据实际需求进行选择和组合,以得到更准确的矩形识别结果。
4.3 K210深度算法
-
MobileNet-SSD:MobileNet-SSD是基于MobileNet和SSD(Single Shot MultiBox Detector)的目标检测算法。它在保持较高精度的同时,具有较低的计算复杂度,非常适合在K210芯片上进行实时的矩形检测与定位。
-
Tiny YOLO:Tiny YOLO是一种轻量级的目标检测算法,它是对YOLO算法的优化版本。通过减少网络结构和运算量,Tiny YOLO在保持较高检测精度的同时,能够在K210芯片上实现实时的矩形检测。
-
EfficientDet:EfficientDet是一种高效的目标检测算法,它结合了EfficientNet和BiFPN(Bi-directional Feature Pyramid Network)。该算法通过设计高效的网络结构和特征金字塔网络,能够在K210上实现准确且高效的矩形检测与定位。
-
CornerNet:CornerNet是一种基于角点的目标检测算法,它通过检测矩形的角点来实现矩形的定位和姿态估计。该算法具有较高的准确性和鲁棒性,在K210芯片上进行角点检测和矩形定位非常有效。
第五章:K210 实现矩形识别并返回坐标
5.1 K210 开发板配置
按照以下步骤进行操作:
-
获取 K210 开发板:购买或准备一块 K210 开发板,如 Sipeed Maixduino 等。
-
安装开发环境:在电脑上安装 K210 的开发环境,主要包括 K210 的工具链和 SDK。
-
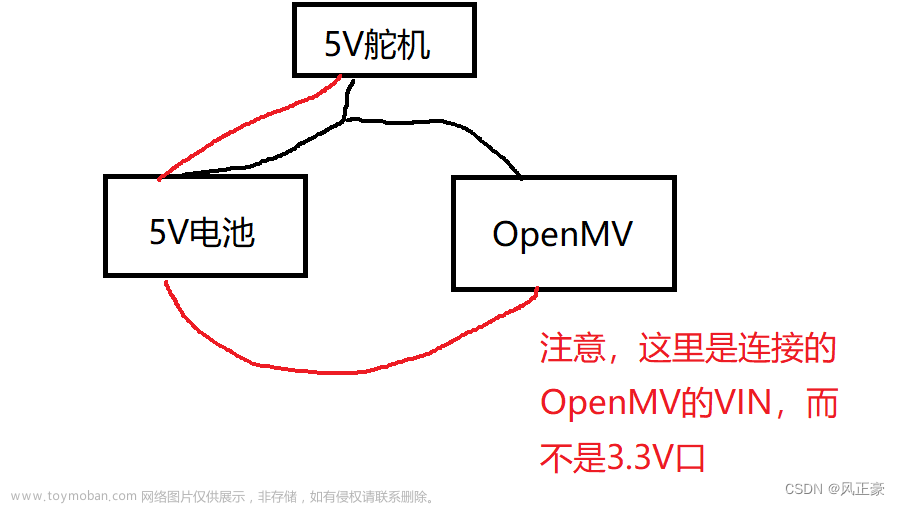
连接开发板:将 K210 开发板通过 USB 线缆与电脑连接,并确保驱动程序正确安装。
-
编程与烧录:使用开发环境编写矩形识别的代码,将代码烧录到 K210 开发板中。
-
配置摄像头:如果需要从摄像头获取图像进行矩形识别,还需要配置和连接摄像头。
5.2 代码编写
在 K210 开发板上进行矩形识别的代码编写,可以使用 K210 提供的 SDK(Software Development Kit)。以下是一般的代码编写步骤:
-
引入必要的库和头文件:根据需要引入与矩形识别相关的库和头文件,如摄像头库、神经网络库等。
-
初始化开发板和摄像头:通过相应的函数调用初始化 K210 开发板和连接的摄像头。
-
图像采集和处理:使用摄像头获取图像数据,并进行预处理,如缩放、裁剪和色彩空间转换等操作。这些操作可根据具体的矩形识别算法来确定。
-
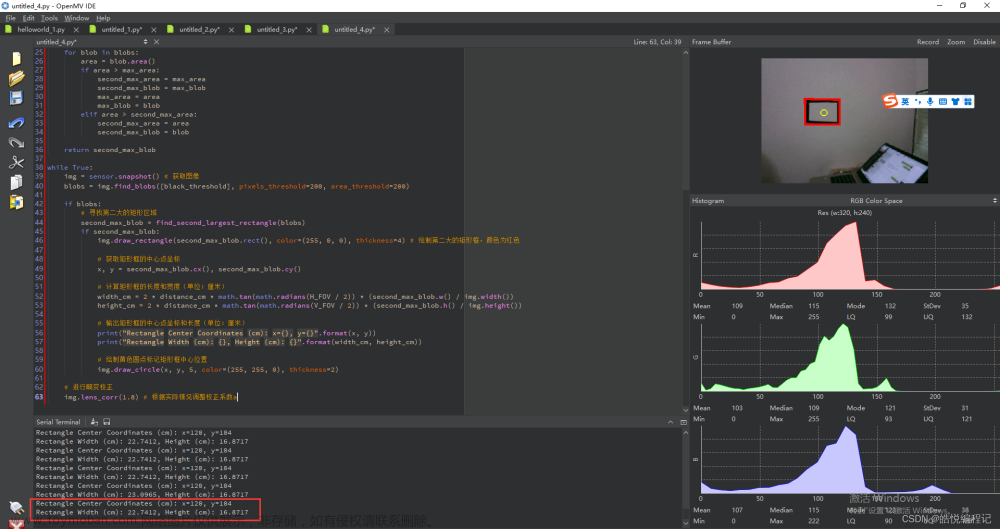
矩形识别与定位:使用选定的矩形识别算法进行图像的矩形检测和定位。根据具体的算法,可以获取矩形的位置、大小和角度等信息。
-
坐标返回:将识别到的矩形的坐标信息返回给主程序或其他设备,以便进行后续处理或显示。
-
清理资源:在完成矩形识别任务后,释放所使用的资源,如摄像头、内存等。
5.3 坐标应用
在实际应用中,可以使用矩形识别得到的坐标信息进行各种操作和应用,如图像分析、目标跟踪、自动驾驶等。以下是一些常见的应用场景:
-
目标跟踪:通过识别和返回的矩形坐标,可以实现对目标物体的跟踪和定位。例如,在视频监控系统中,可以通过矩形识别得到的坐标信息,实现对目标物体的自动追踪。
-
姿态估计:通过识别和返回的矩形坐标和角度信息,可以进行物体的姿态估计。例如,在机器人导航系统中,可以使用矩形识别结果来判断物体的朝向和姿态,从而实现更准确的导航和操作。
-
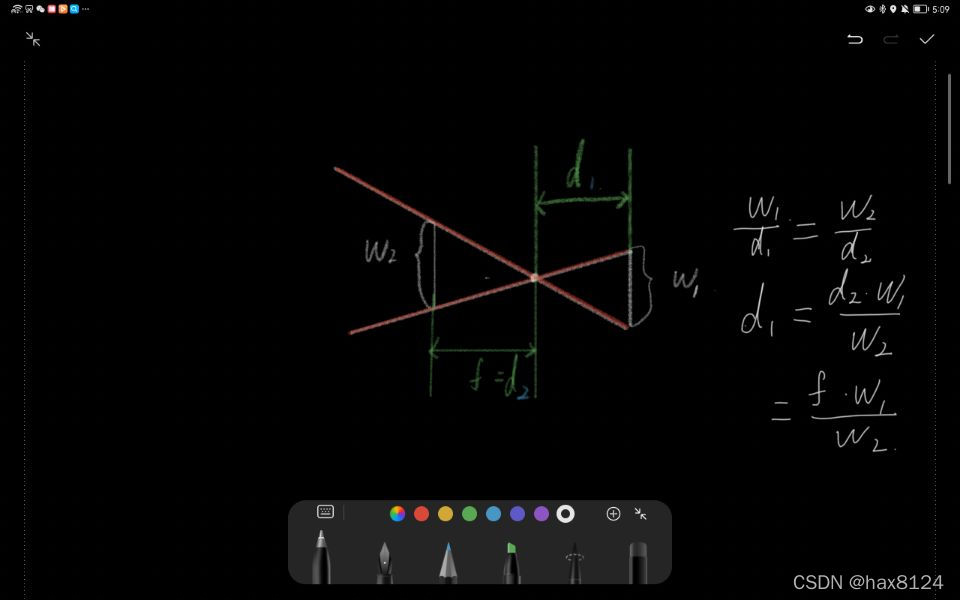
物体测量:通过识别和返回的矩形坐标和大小信息,可以进行物体的尺寸测量。例如,在生产线上,可以使用矩形识别结果来测量产品的长度、宽度等参数,以保证产品质量和一致性。
第六章:总结
本文系统地介绍了基于K210开发板的矩形识别技术的实现过程,并探讨了其在实际应用中的重要性和前景。通过对K210开发板的配置和编写相应的代码,可以在K210上实现准确和实时的矩形识别。未来,基于K210的矩形识别技术有望进一步优化算法、扩展功能,并在更多领域中得到应用。
下一章内容:使用K210进行实地测试,得到矩形的坐标文章来源:https://www.toymoban.com/news/detail-622815.html
硬性的标准其实限制不了无限可能的我们,所以啊!少年们加油吧!文章来源地址https://www.toymoban.com/news/detail-622815.html
到了这里,关于2023 电赛 E 题 K210方案的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!