分上下位机,下位机向上位机发送数据。(上位机控制,下位机收集数据)
可能用到的函数:
UART:通用异步 收/发器
USART:通用同步/异步 收/发器
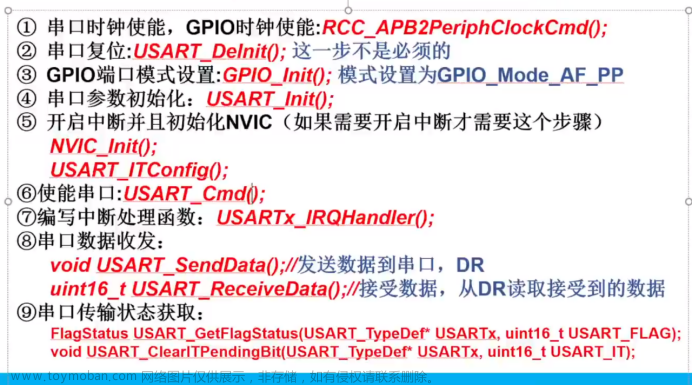
USART_init()串口初始化:波特率、数据字长,奇偶校验,硬件流控及收发使能
USART_Cmd使能串口 USART_ITConfig()使能相关中断
USART_SendData()发送数据到串口
同步通信:接收端和发送端时钟频率一致,误差小;效率高;可用于点对多点
异步通信:接收端和发送端时钟可以不一致,允许一定误差;效率低;只适用于点对点
流程:openmv识别到物体,发送特定数据给STM32
1、openmv使用异步通信UART
from pyb import UART——>调用pyb中的UART使用串口通信
uart=UART (串口,波特率)
uart.init(波特率,字长,奇偶校验位,停止位)——>串口初始化
识别到指定物体
uart .write('……')——>括号里的是发送的数据
uart.read(2)——>不太知道是干嘛的,我感觉这里应该写一个东西证明发送成功,我再研究研究文章来源:https://www.toymoban.com/news/detail-623101.html
2、STM32接收——>待续文章来源地址https://www.toymoban.com/news/detail-623101.html
到了这里,关于学习记录之openmv和STM32F103的通信的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!