之前项目中需要用到正弦信号的频率测量,也参考了几个大佬的博客(链接如下),但可能是由于stm32的型号不匹配,虽然也在网上查了一些需要修改的地方,但结果一直不太对,后来经过自己摸索结果终于对了,在这里给大家分享下,具体原理不在赘述。
参考的部分大佬博客(stm32f103zet6):
链接1: https://blog.csdn.net/weixin_43368814/article/details/103552114.
链接2: https://blog.csdn.net/weixin_42616791/article/details/108419412.
优缺点
1、fft方式测频率,峰峰值可以最低为20mV,输入捕获方式,峰峰值需要达到七、八百mV以上,才可以精准测量;
2、程序的测量精度利用信号发生器进行了验证(下面表格的数据基本是在峰峰值20mV下测得,峰峰值更大些精度会更高些。
| 信号发生器输出 | 实测 |
|---|---|
| 10khz | 9961hz |
| 15khz | 15040hz |
| 20khz | 20022hz |
| 25khz | 25000hz |
| 30khz | 29987hz |
| 35khz | 34968hz |
3、在峰峰值的峰谷(顶点)小于1.6v时,该方式可以测量的最小峰峰值为20mv(信号发生器的最小峰峰值为20mV),一旦峰底值(最小值)超过1.6V(峰峰值仍为20mV),测量结果就不准了,误差很大(我暂时没找到原因,有知道原因的大佬,欢迎评论区解答);
代码
头文件
#include <stdio.h>
#include "string.h"
#include "fft_calculate.h"
#include "adc.h"
#define ADC1_DR_Address ((uint32_t)0x4001244C)
uint16_t ADC_Value[NPT];
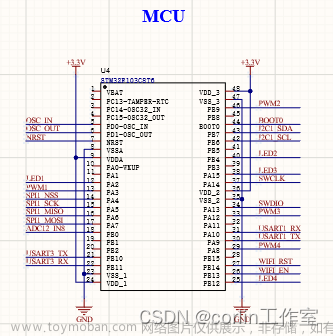
adc(PA6,定时器2外部触发)
void Adc_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T2_CC2;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
ADC_RegularChannelConfig(ADC1, ADC_Channel_6, 1, ADC_SampleTime_1Cycles5);
//使能ADC、DMA
ADC_DMACmd(ADC1,ENABLE);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
ADC_ExternalTrigConvCmd(ADC1, ENABLE);
}
DMA(一次接收1024点数据)
void DMA1_Init(void)
{
DMA_InitTypeDef DMA_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);
DMA_DeInit(DMA1_Channel1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&ADC_Value;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = NPT;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord ;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord ;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular ;
DMA_InitStructure.DMA_Priority = DMA_Priority_High ;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
DMA_ClearITPendingBit(DMA1_IT_TC1);
DMA_ITConfig(DMA1_Channel1,DMA_IT_TC, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_Cmd(DMA1_Channel1,ENABLE);
}
定时器
void TIM2_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 9;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性低
TIM_OC2Init(TIM2, & TIM_OCInitStructure); //初始化外设TIM2_CH2
TIM_Cmd(TIM2, ENABLE); //使能TIMx
}
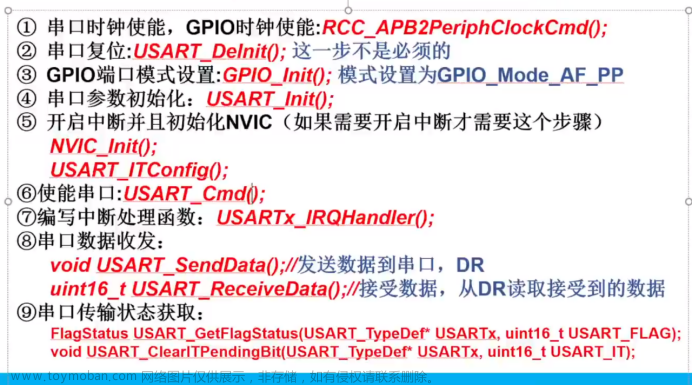
中断处理函数(不需要在.h文件中定义,main中直接调用)文章来源:https://www.toymoban.com/news/detail-623144.html
void DMA1_Channel1_IRQHandler(void)
{
u16 i = 0;
if(DMA_GetITStatus(DMA1_IT_TC1)!=RESET)
{
for(i=0;i<NPT;i++)
{
InBufArray[i] = ((signed short)(ADC_Value[i])) << 16;
}
DMA_ClearITPendingBit(DMA1_IT_TC1);
}
}
#最后附上程序下载地址
链接: 链接:https://pan.baidu.com/s/1CuYofbGRXZIoccYkexHHzw
.提取码:fp1q文章来源地址https://www.toymoban.com/news/detail-623144.html
到了这里,关于基于stm32f103c8t6的fft频率计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[STM32F103C8T6]基于stm32的循迹,跟随,避障智能小车](https://imgs.yssmx.com/Uploads/2024/02/533808-1.png)