openmv卡尔曼滤波多目标追踪
卡尔曼滤波的作用是在短暂丢失,遮掩,两个目标重合的情况下保持对物体的追踪。kalman_example.py给出了一个简单的示例,对一个圆周运动和一个不动的点进行追踪,两个点每转一周会有短暂时间的重合。但最终我发现,其对art用处不大,因为art对传统图像算法的优化太差了,导致帧率较低。对普通的openmv可能用处较大。当然,也可将其应用到其它地方,只要将openmv_numpy的调用改为对numpy的调用即可。
测试视频。文章来源:https://www.toymoban.com/news/detail-623207.html
使用方法
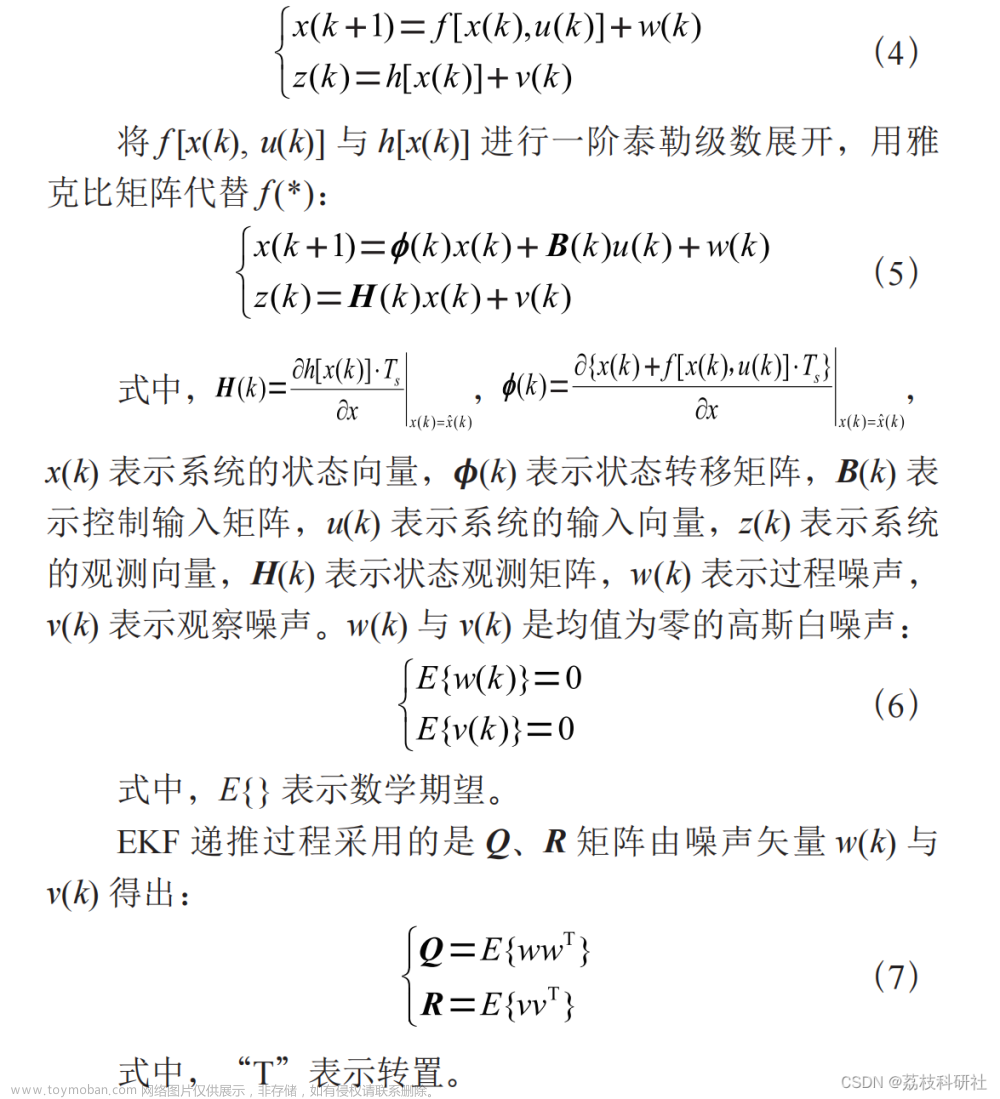
首先要初始化 A , H , Q , R A,H,Q,R A,H,Q,R矩阵,建立一个Tracker_Manager(),其作用是管理追踪器。然后将每帧图像的目标用math方法进行匹配,之后用update方法进行更新。最后可以用get_motion_trail_pre获得目标的ID和轨迹。文章来源地址https://www.toymoban.com/news/detail-623207.html
Manager = Tracker_Manager()#定义一个管理器
Manager.match(x,y,A,H_k,Q,R)#进行匹配
Manager.update()#更新管理器
Manager.get_motion_trail_pre()#获取预测坐标轨迹
Manager.get_positions()#获取后验坐标
Manager.get_motion_trail_measure()#获取测量坐标轨迹
到了这里,关于openmv卡尔曼滤波多目标追踪的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!