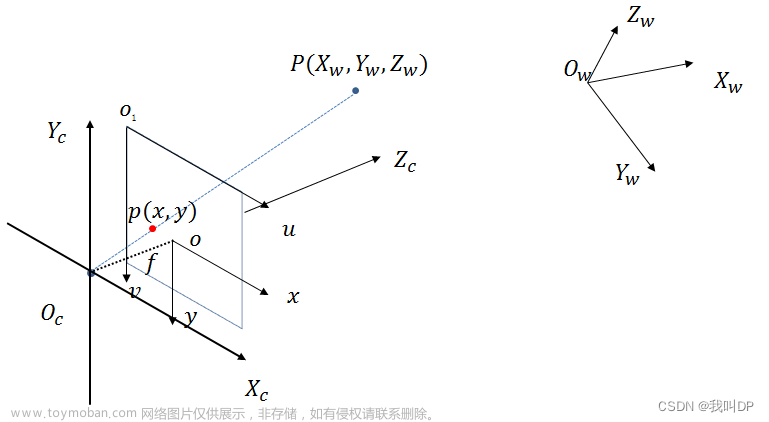
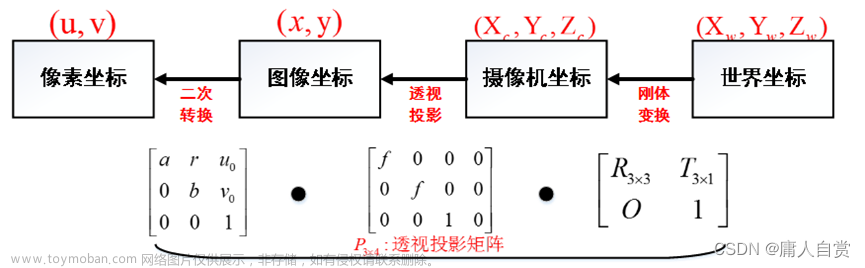
下面的python脚本实现了通过Apriltag码(tag16h5)估计物体在相机坐标系下的位姿的功能。
世界坐标系原点为id=10的tag中心,物体坐标系各坐标轴朝向和世界坐标系相同,仅存在一个平移变换obj2world_T。文章来源:https://www.toymoban.com/news/detail-623783.html
import numpy as np
import apriltag
import cv2
img = cv2.imread("color.png")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
at_detector = apriltag.Detector(apriltag.DetectorOptions(families='tag16h5'))
tags = at_detector.detect(gray)
#print("tags: {}\n".format(tags))
cam_params = np.array([612.345825, 613.81781, 318.473251, 237.981806]) #fx, fy, cx, cy
tag_len = 48 #tag的边长(单位:mm)
obj2world_T = np.array([20, 95, 50]) #物体中心在世界坐标系中的坐标值
for tag in tags:
if tag.tag_id == 10: #世界坐标系原点为id=10的tag中心
M, e1, e2 = at_detector.detection_pose(tag, cam_params)
M[:3,3:] *= tag_len
obj2world = np.identity(4)
obj2world[:3, 3] = obj2world_T
world2camera = M
obj2camera = world2camera.dot(obj2world)
print("obj2camera:\n", obj2camera)
for i in range(4):
cv2.circle(img, tuple(tag.corners[i].astype(int)), 4, (255, 0, 0), 2)
cv2.circle(img, tuple(tag.center.astype(int)), 4, (2, 180, 200), 4)
cv2.imwrite("mark.png",img)
参考:Apriltag使用之二:方位估计(定位)文章来源地址https://www.toymoban.com/news/detail-623783.html
到了这里,关于通过Apriltag码估计物体在相机坐标系下的位姿的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!