文章来源地址https://www.toymoban.com/news/detail-624006.html
文章来源:https://www.toymoban.com/news/detail-624006.html
到了这里,关于基于ARM+FPGA (STM32+ Cyclone 4)的滚动轴承状态监测系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了基于ARM+FPGA (STM32+ Cyclone 4)的滚动轴承状态监测系统。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-624006.html
文章来源:https://www.toymoban.com/news/detail-624006.html
到了这里,关于基于ARM+FPGA (STM32+ Cyclone 4)的滚动轴承状态监测系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!

本次项目是在https://github.com/yfshich/wdcnn_bearning_fault_diagnosis-master 开源项目基础上做的迭代曲线和混淆矩阵和特征可视化 1项目文件 data文件夹装载的是凯斯西楚大学(CWRU)轴承数据集 以0HP文件夹为例,进行展示 main_0HP.py、main_1HP.py、main_2HP.py和main_3HP.py是故障诊断主程序,分

展示了如何将LabVIEW开发出一种有效的滚动轴承故障在线监测系统。介绍了该系统的开发过程、工作原理及其在实际应用中的效果。该系统成功地应用于对滚动轴承故障的早期诊断,提高了故障检测的准确性和效率。 滚动轴承在工作过程中会产生复杂的振动信号,包括非周期

完整的伺服系统所包含的模块比较多,因此无法逐一详细介绍,所以本章着重介绍 设计难度较高的 FPGA 部分并简单介绍 ARM 端的工作流程。 FPGA 部分主要有 FOC 算法、电流采样算法及编码器采样算法,是整个控制系统的基础,直接决定电机控制 效果的好坏。因为 FPGA 工作的特

设计需求 一套完整的伺服控制方案包括了上位机、驱控一体控制器和功率板三者。操作人员 通过上位机发送各种不同指令,然后控制器解析指令后执行相应的伺服功能,其次控 制器将驱动信号传输至功率板驱动电机,最后控制器采集反馈信息进行闭环控制并上 传数据。 结

本部分主要介绍 FPGA+ARM 控制部分的软件设计。 FPGA+ARM 控制部分包括 Verilog HDL 硬件描述语言和 C 语言的开发。 FPGA 部分主要控制 AD7606 模数转换、数字三相锁相 环和FFT谐波计算模块、 SDRAM 控制器的设计、 FSMC 接口模块等。 ARM 部分主要完成嵌 入式实时操作系统 FreeRTOS 的移植
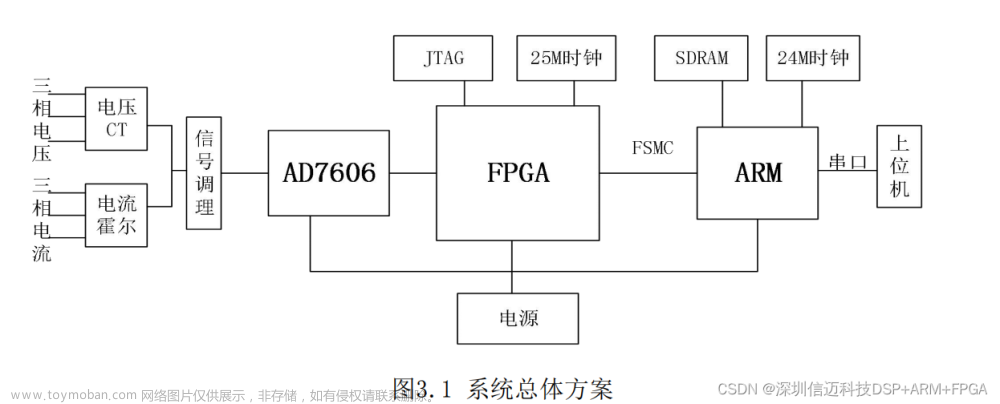
本章主要给出了本系统的设计目标和硬件设计方案,后面详细介绍了硬件电路的设计 过程,包括数据采集板、 FPGA+ARM 控制板。 3.1系统设计目标 本系统的主要目的是实现电能质量指标的高精度测量和数据分析,其具体技术指标如 下所示: 1.电能质量指标测量精度: (1) 电压:

针对在软体机器人控制时 , 多电机协同控制过程中难度大 、 通用性差 、 协同性差等缺点 , 设计了基于 ARM 和 FPGA 的软体机器人的控制器局域网络 ( controller area network , CAN ) 总线运动控制器 , 采用 ARMCortex-M4 为内核的 STM32F407 开发板和 AX7102 FPGA 开发板设计一种基于 C
SPI通信协议有以下4种模式: 模式0:时钟极性为0,时钟相位为0,数据在时钟下降沿捕获,数据在时钟上升沿改变。 模式1:时钟极性为0,时钟相位为1,数据在时钟上升沿捕获,数据在时钟下降沿改变。 模式2:时钟极性为1,时钟相位为0,数据在时钟上升沿捕获,数据在时钟

运动控制器是数控机床 、 高端机器人等自动化设备控制系统的核心 。 为保证控制器的实用性 、 实时性和稳定 性, 提出一种以 STM32 为主控制器 、 FPGA 为辅助控制器的多轴运动控制器设计方案 。 给出了运动控制器的硬件电路设计 , 将 S 形加减速算法融入运动控制器 ,
数据采集系统在现代工程中起着至关重要的作用,用于实时获取和处理各种传感器或外部设备的数据。在本文中,我们将探讨如何基于STM32微控制器和FPGA(现场可编程门阵列)实现一个高效的数据采集系统。我们将详细介绍系统设计的关键步骤,并提供相应的源代码示例。



