目录
1、PID原理
2、一个例子(详细解释了)
3、PID经验调参(一点经验)
1、PID原理
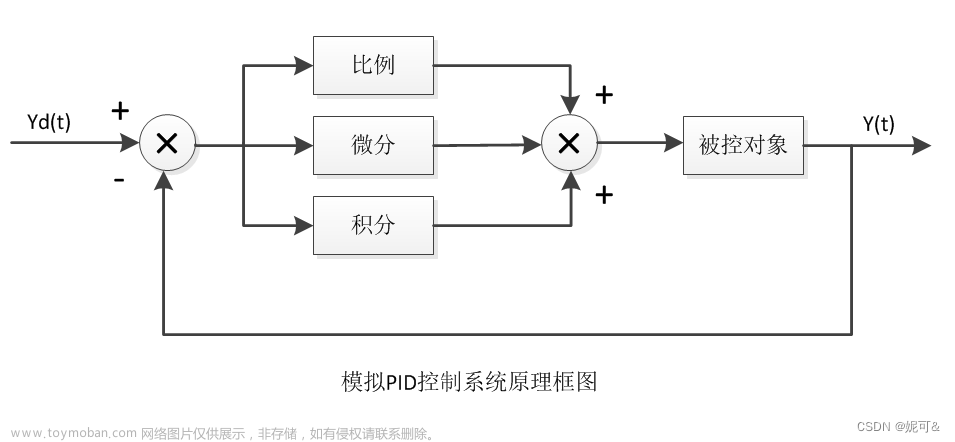
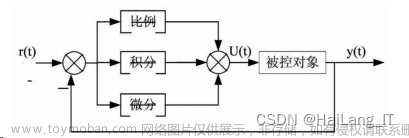
1.1 PID整体框图

过程描述为: 设定一个输出目标,反馈系统传回输出值,如与目标不一致,则存在一个误差,PID 根据此误差调整输入值,直至输出达到设定值.
疑问:那么我们为什么需要PID 呢,比如我控制温度,我不能监控温度值,温度值一到就停止吗?
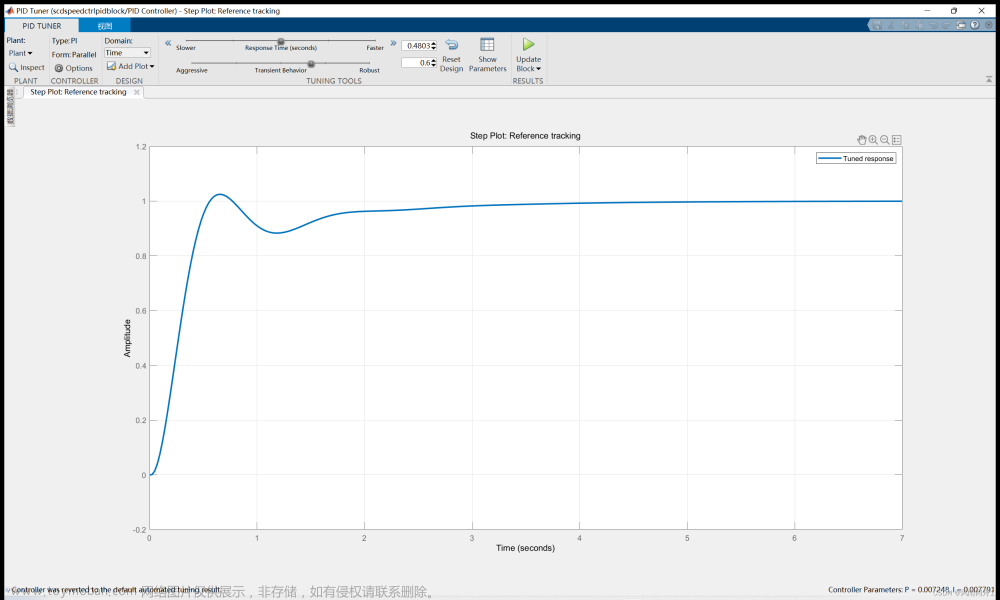
这里必须要先说下我们的目标,因为我们所有的控制无非就是想输出能够达到我们的设定,即如果我们设定了一个目标温度值,那么我们想要一个什么样的温度变化呢.
比如设定目标温度为30度, 目标无非是希望达到图1 希望其能够快速而且没有抖动的达到30度.

如果我们对温度控制要求不高的话, 使用温度一到就停止的办法也可以,这种方法就是我们常说的开环控制。但肯定达不到图1 这样的要求,因为温度到了后余温也会让温度继续升高.而且温度自身也会通过空气散热的。
总结:我们需要PID 的原因无非就是由于系统的损耗普通控制手段没有办法使输出快速稳定的到达设定值.
1.2 PID公式

在实际应用中只能通过测量系统得到某一时刻的误差并记录下来,没法得到误差e在每一个时间的值(即e随时间变化的准确函数)。因此需要对公式 1 进行离散化表示,实际编程中也用的是离散化的公式4。
Kp-------比例常数
Ki= (Kp*T)/Ti------积分常数
Kd=(Kp*Td)/T------微分常数
2、一个例子(点击下面的链接)
初识PID-搞懂PID概念 - 知乎 (zhihu.com)
这是知乎上一个大佬对PID原理很详细的解释,里面详细解释了为什么比例环节会产生偏差,为什么积分环节可以消除偏差,以及微分环节消除震荡。
我对『PID算法』的理解 —— 原理介绍 - DF创客社区 - 分享创造的喜悦 (dfrobot.com.cn)
形象生动的解释了各个参数的作用
3、PID经验调参(一点经验)
1)
PID调试一般原则
a.在输出不振荡时,增大比例系数P。
b.在输出不振荡时,减小积分系数Ki。
c.在输出不振荡时,增大微分系数Kd。
(他们三个任何谁过大都会造成系统的震荡。)
2)
a.确定比例增益P :确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ki=0、Kd=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%70%。比例增益P调试完成。
b.确定积分时间常数Ki比例增益P确定后,设定一个较大的积分时间常数Ki的初值,然后逐渐减小Ki,直至系统出现振荡,之后在反过来,逐渐加大Ki,直至系统振荡消失。记录此时的Ki,设定PID的积分时间常数Ki为当前值的150%~180%。积分时间常数Ki调试完成。但是由于实际控制电机的过程中,很有可能不给i也不会引起系统的震荡,这个时候就需要我们自己判断给一个i的值来实现系统更快的响应。
c.确定积分时间常数Kd 积分时间常数Kd一般不用设定,为0即可。若要设定,与确定 P和Ki的方法相同,取不振荡时的30%。
d.系统空载、带载联调,再对PID参数进行微调,直至满足要求。
 文章来源:https://www.toymoban.com/news/detail-624713.html
文章来源:https://www.toymoban.com/news/detail-624713.html
 文章来源地址https://www.toymoban.com/news/detail-624713.html
文章来源地址https://www.toymoban.com/news/detail-624713.html
到了这里,关于PID理解及调参的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![[调参神器]使用VOFA+上位机进行PID调参(附下位机代码)](https://imgs.yssmx.com/Uploads/2024/01/405953-1.png)