💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现
💥1 概述
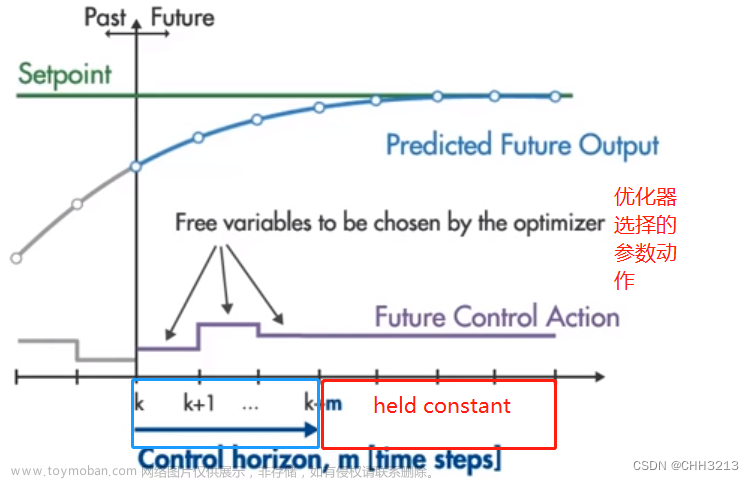
本文的模型预测控制 (MPC) 可预测和优化未来时间范围内的时变过程。此控制包接受线性或非线性模型。利用APOPT、IPOPT等大规模非线性规划求解器,解决数据调和、移动视界估计、实时优化、动态仿真、非线性MPC问题。
模型预测控制(Model Predictive Control,MPC)是一种基于模型的控制方法,可以用于连续或离散、线性或非线性系统的控制。根据系统的特性,可以选择不同类型的模型进行建模。
1. 离散模型:对于离散时间系统,MPC使用离散时间模型来描述系统的离散演化。常见的离散模型包括离散状态空间模型、差分方程模型或传输函数模型。离散模型可以由系统的采样数据进行辨识得到,或者通过离散化连续时间模型所得到。
2. 连续模型:对于连续时间系统,MPC使用连续时间模型来描述系统的动态行为。常见的连续模型包括连续状态空间模型、微分方程模型或传输函数模型。连续模型通常是根据系统动态方程和物理特性进行建模,并使用系统辨识技术或系统参数估计方法得到。
3. 线性模型:线性模型是MPC中广泛应用的模型类型。这种模型假设系统的动态行为是线性的,其中状态的演化由线性方程描述,输出与输入之间的关系也是线性的。线性模型通常可以通过系统辨识技术(如最小二乘法或系统辨识算法)从实验数据中获得,或者基于已知的系统动态方程推导。
4. 非线性模型:对于非线性系统,MPC可以使用非线性模型进行建模。这种模型可以是非线性状态空间模型、非线性微分方程模型或非线性传输函数模型。非线性模型的建立可能涉及系统辨识技术、参数优化或基于物理知识进行的数学建模。
根据实际应用和系统特点,MPC的模型选择和建模方法可能有所不同。重要的是,在选择合适的模型时考虑系统的特性、计算复杂度和性能要求。此外,模型的有效性需要进行验证和实际应用中的调试和优化。
📚2 运行结果

部分代码:
clear all
close all
% define s
s = tf('s');
% define 2 x 2 control matrix in s-domain (continuous)
G11 = 2/((5*s+1)*(2*s+1))*exp(-6*s);
G12 = -1/((4*s+1)*(2*s+1));
G21 = 2/((4*s+1)*(2*s+1))*exp(-4*s);
G22 = 4/((2*s+1)*(s+1)^3)*exp(-3*s);
% overall transfer function
Gc = [G11 G12;...
G21 G22];
% get step response
figure(1)
step(Gc)
% convert to discrete form with 1 second sampling (z-domain)
Gd = c2d(Gc,1);
hold on
step(Gd)
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]梁天添,王茂.线性时变时滞连续-离散描述系统鲁棒故障诊断滤波器设计[J].中国惯性技术学报,2018,26(06):841-848.DOI:10.13695/j.cnki.12-1222/o3.2018.06.023.
[2]田德,周臣凯,唐世泽等.基于自适应模型预测控制的大型风电机组MPPT方法[J].太阳能学报,2023,44(06):501-508.DOI:10.19912/j.0254-0096.tynxb.2022-0958.文章来源:https://www.toymoban.com/news/detail-625553.html
[3]赵玉帅,石沛林,郑辽东等.基于模型预测控制的车辆横向避撞仿真研究[J].山东理工大学学报(自然科学版),2023,37(05):59-67.DOI:10.13367/j.cnki.sdgc.2023.05.008.文章来源地址https://www.toymoban.com/news/detail-625553.html
🌈4 Matlab代码实现
到了这里,关于【模型预测控制MPC】使用离散、连续、线性或非线性模型对预测控制进行建模(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!