🎀 文章作者:二土电子
🌸 关注文末公众号获取其他资料和工程文件!
🐸 期待大家一起学习交流!
本文涉及到定时器和串口的知识,详细内容可见博主STM32速成笔记专栏。
一、TB6612简介
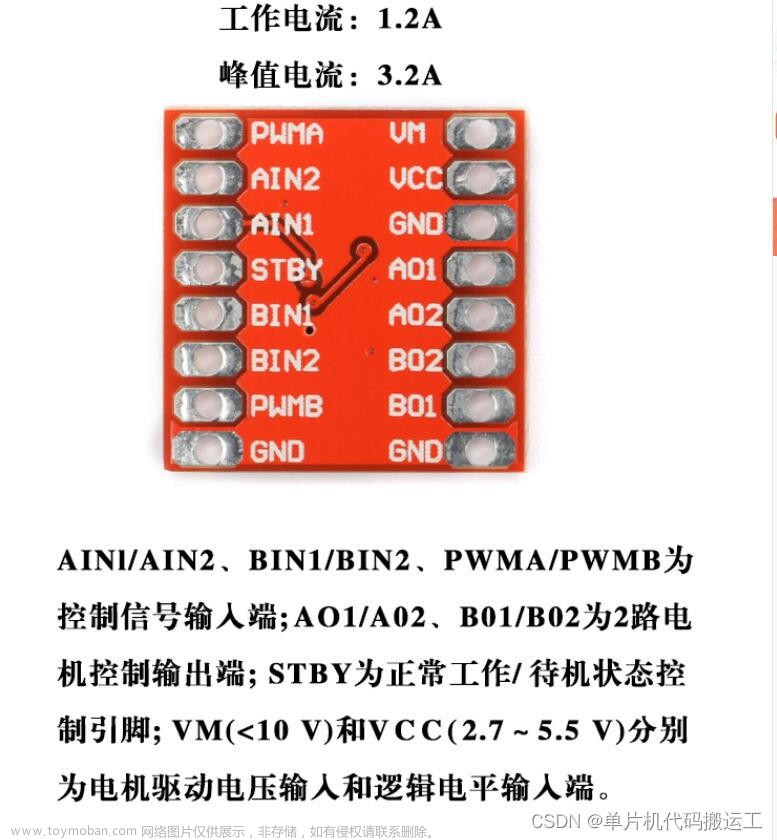
TB6612FNG是东芝半导体的一款驱动电机的IC。一个TB6612FNG可以驱动两个电机,每一个驱动都有两个逻辑输入引脚,一个输出引脚和一个PWM引脚。可以通过给两个逻辑输入引脚不同的电平来控制电机的运行状态,通过PWM输入引脚实现电机调速。TB6612FNG还具有以下特点
- 电源电压最大可到15V
- 输出电流最大可达3.2A
- 内置热停机电路和低压检测电路
- 有正转,反转,短制动和停止四种模式

二、TB6612使用方法
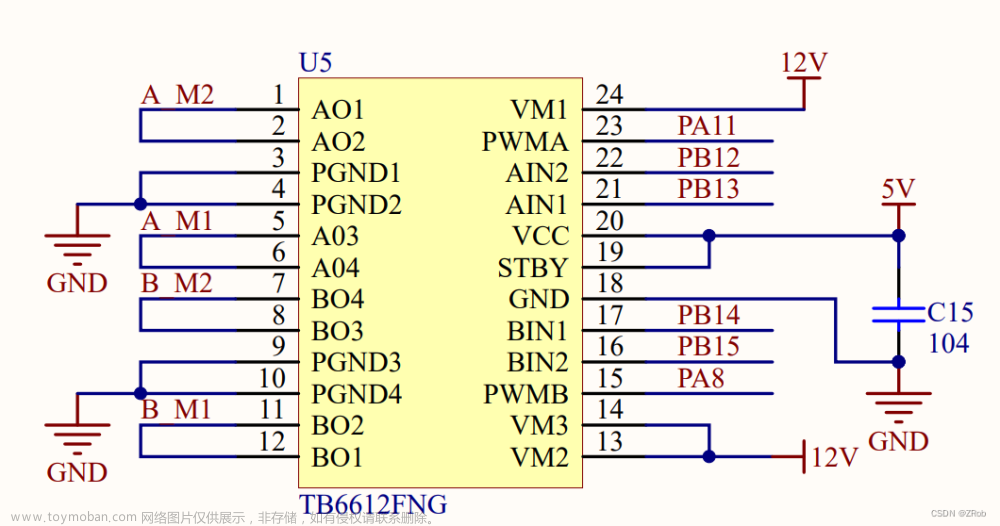
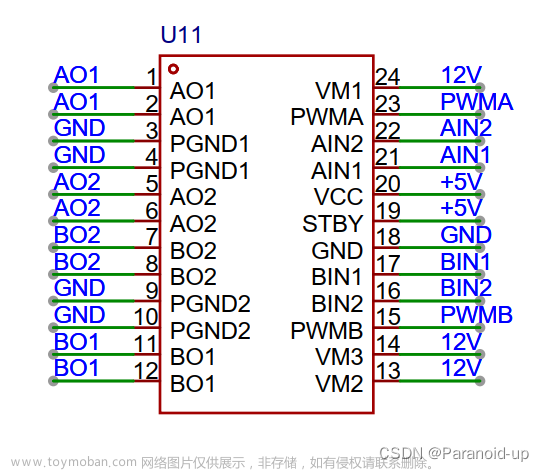
2.1 TB6612引脚连接
| 引脚 | 连接 |
|---|---|
| PWMA | A通道的PWM输入 |
| AIN2 | A通道逻辑输入2引脚 |
| AIN1 | A通道逻辑输入1引脚 |
| STBY | 待机引脚,接低电平处于待机模式,接高电平开始工作 |
| BIN1 | B通道逻辑输入1引脚 |
| BIN2 | B通道逻辑输入2引脚 |
| PWMB | B通道PWM输入引脚 |
| GND | 地 |
| VM | 电源输入正极,最大接15V |
| VCC | 逻辑电源正极,接3.3V |
| AO1 | A通道输出1引脚 |
| AO2 | A通道输出2引脚 |
| BO2 | B通道输出2引脚 |
| BO1 | B通道输出1引脚 |
使用时VM接电机电源的正极,GND接电机电源的负极。IN1和IN2接逻辑输入,PWM接PWM输出引脚。O1和O2接电机的正负极。
2.2 控制逻辑
IN1和IN2的高低电平状态对应不同的电机运行状态,二者的对应关系如下
| IN1 | 0 | 0 | 1 |
| IN2 | 0 | 1 | 0 |
| 电机运行状态 | 停止 | 正转 | 反转 |
上述的正反转是AO1接电机正极,AO2接电机负极的对应关系。
2.3 电机调速
电机调速的远离比较简单,只需要给TB6612FNG的PWM输入引脚输入10KHz的PWM波。调节占空比即可调节转速。需要注意的是如果PWM配置的极性是低电平,那么设置占空比时的值越大,电机转速越低。相反,如果PWM配置的极性是高电平,那么设置占空比时的值越大,电机转速越高。
三、实战项目
3.1 项目简介
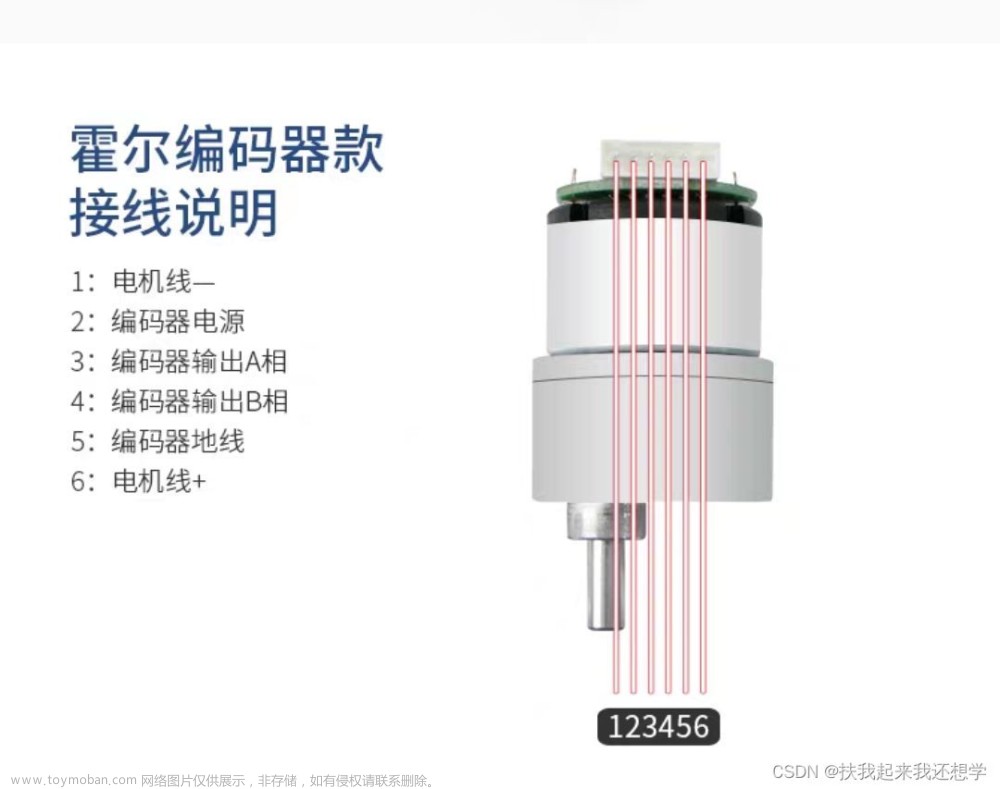
本项目比较简单,使用TB6612驱动一个12V减速电机。利用串口发送占空比,实现电机的调速。
3.2 初始化GPIO
初始化GPIO完成的工作是初始化逻辑控制引脚,程序如下
/*
*==============================================================================
*函数名称:Drv_MotorGpio_Init
*函数功能:初始化Motor的GPIO
*输入参数:无
*返回值:无
*备 注:这里只初始化了逻辑控制IO,PWM的IO在定时器配置PWM时初始化
*==============================================================================
*/
void Drv_MotorGpio_Init (void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义结构体
// 开启时钟
RCC_APB2PeriphClockCmd(MOTOR_GPIO_TIM,ENABLE);
// 配置结构体
GPIO_InitStructure.GPIO_Pin = MOTOR_GPIO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽式输出
GPIO_Init(MOTOR_GPIO, &GPIO_InitStructure);
}
宏定义如下
// 电机逻辑控制GPIO
#define MOTOR_GPIO_TIM RCC_APB2Periph_GPIOC
#define MOTOR_GPIO GPIOC
#define MOTOR_GPIO_PIN GPIO_Pin_7 | GPIO_Pin_8
3.3 PWM初始化
PWM初始化程序如下
/*
*==============================================================================
*函数名称:TIM2_CH1_PWM_Init
*函数功能:初始化定时器2的PWM通道1
*输入参数:per:自动重装载值;psc:预分频系数
*返回值:无
*备 注:无
*==============================================================================
*/
void TIM2_CH1_PWM_Init (u16 per,u16 psc)
{
// 结构体定义
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
// 初始化GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure);
// 初始化定时器参数
TIM_TimeBaseInitStructure.TIM_Period = per; // 自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; // 分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 设置向上计数模式
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
// 初始化PWM参数
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 比较输出模式
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 输出使能
TIM_OC1Init(TIM2,&TIM_OCInitStructure); // 输出比较通道1初始化
TIM_OC1PreloadConfig(TIM2,TIM_OCPreload_Enable); // 使能TIMx在 CCR1 上的预装载寄存器
TIM_ARRPreloadConfig(TIM2,ENABLE); // 使能预装载寄存器
TIM_Cmd(TIM2,ENABLE); // 使能定时器
}
初始化时配置如下,配置为10KHz
TIM2_CH1_PWM_Init(1000,71); // 初始化PWM
3.4 电机控制程序
电机正反转和停止控制程序如下
/*
*==============================================================================
*函数名称:Med_Motor_Go
*函数功能:电机正转
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Med_Motor_Go (void)
{
MOTOR_IN1 = 1;
MOTOR_IN2 = 0;
}
/*
*==============================================================================
*函数名称:Med_Motor_Stop
*函数功能:电机停转
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Med_Motor_Stop (void)
{
MOTOR_IN1 = 0;
MOTOR_IN2 = 0;
}
/*
*==============================================================================
*函数名称:Med_Motor_Reverse
*函数功能:电机反转
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Med_Motor_Reverse (void)
{
MOTOR_IN1 = 0;
MOTOR_IN2 = 1;
}
宏定义如下
// 电机逻辑控制引脚
#define MOTOR_IN1 PCout(7)
#define MOTOR_IN2 PCout(8)
3.5 串口接收处理函数
串口需要根据接收到的占空比来配置输出PWM的占空比,配置占空比使用的库函数是文章来源:https://www.toymoban.com/news/detail-626346.html
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)
串口只支持输入大于100小于1000的占空比,串口接收处理程序如下文章来源地址https://www.toymoban.com/news/detail-626346.html
/*
*==============================================================================
*函数名称:USART1_IRQHandler
*函数功能:USART1中断服务函数
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
u32 gReceCount = 0; // 接收计数变量
u32 gClearCount = 0; // 清空接收数组计数变量
u8 gReceFifo[1500]; // 接收数组
u8 gReceEndFlag = 0; // 接收完成标志位
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收到一个字节
{
gReceFifo[gReceCount++] = USART_ReceiveData(USART1);
}
else if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET) //接收到一帧数据
{
USART1->SR; // 先读SR
USART1->DR; // 再读DR
gReceEndFlag = 1; // 接收完成标志置1
}
}
/*
*==============================================================================
*函数名称:Uart_Rece_Pares
*函数功能:解析串口接收内容
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Uart_Rece_Pares(void) // 串口接收内容解析函数
{
u16 pwmDuty = 0; // 接收串口发送来的占空比
if (gReceEndFlag == 1) // 如果接收完成
{
// 解析接收内容
// 一位数
if (gReceCount == 3)
{
pwmDuty = (gReceFifo[0] - 48);
}
else if (gReceCount == 4)
{
pwmDuty = (gReceFifo[0] - 48) * 10;
pwmDuty = pwmDuty + (gReceFifo[1] - 48);
}
else if (gReceCount == 5)
{
pwmDuty = (gReceFifo[0] - 48) * 100;
pwmDuty = pwmDuty + (gReceFifo[1] - 48) * 10;
pwmDuty = pwmDuty + (gReceFifo[2] - 48);
}
printf ("duty=%d\r\n",pwmDuty);
TIM_SetCompare1(TIM2,pwmDuty);
// 清空接收数组
for (gClearCount = 0;gClearCount < gReceCount;gClearCount ++)
{
gReceFifo[gClearCount] = ' ';
}
gReceEndFlag = 0; // 清除接收完成标志位
gReceCount = 0; // 清零接收计数变量
}
}
到了这里,关于STM32外设系列—TB6612FNG的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!