机器人控制算法十之运动学与动力学:DH建模与雅可比矩阵详解
简介:
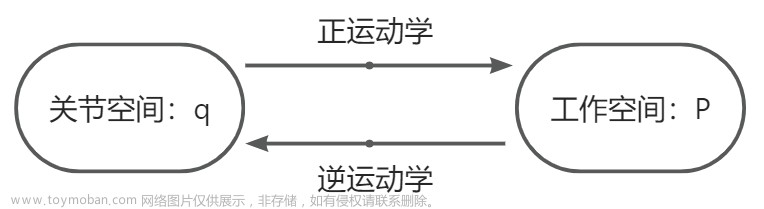
- 正运动学建模
- 逆运动学求解
- 动力学-雅可比矩阵
- …
 文章来源:https://www.toymoban.com/news/detail-626951.html
文章来源:https://www.toymoban.com/news/detail-626951.html
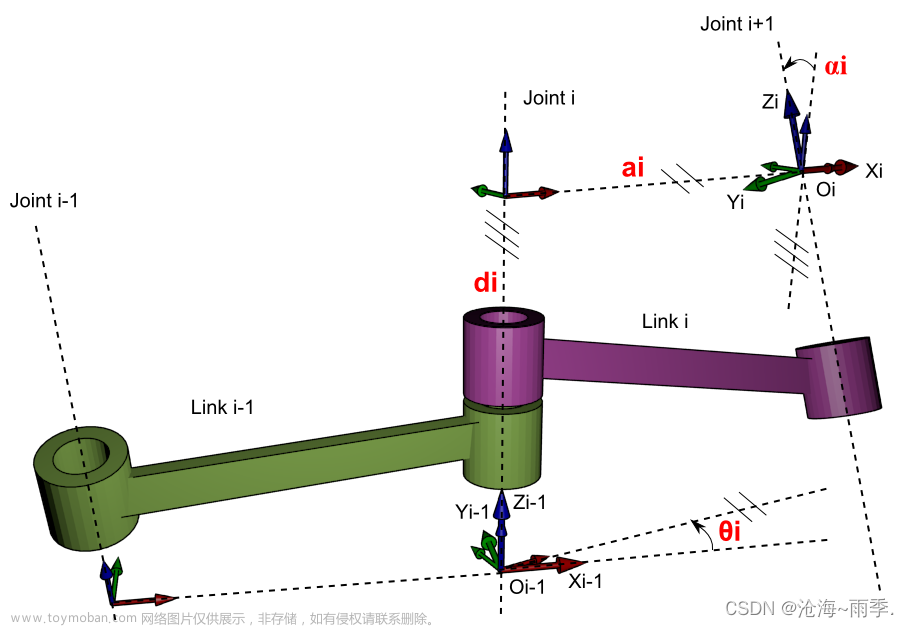
1.正运动学DH建模
1.1 标准DH建模方法
关于标准DH建模的详细说明,可参考:一文带你完全掌握机器人DH参数建模(详细步骤+实例+代码)文章来源地址https://www.toymoban.com/news/detail-626951.html
- 例:Puma560: 6自由度关节机器人,6个关节都是旋转副;前3个关节用于确定手腕参考点的位置,后3个关节用于确定手腕的方位 (a, α, d, θ).
到了这里,关于机器人控制算法十之运动学与动力学:DH建模与雅可比矩阵详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!