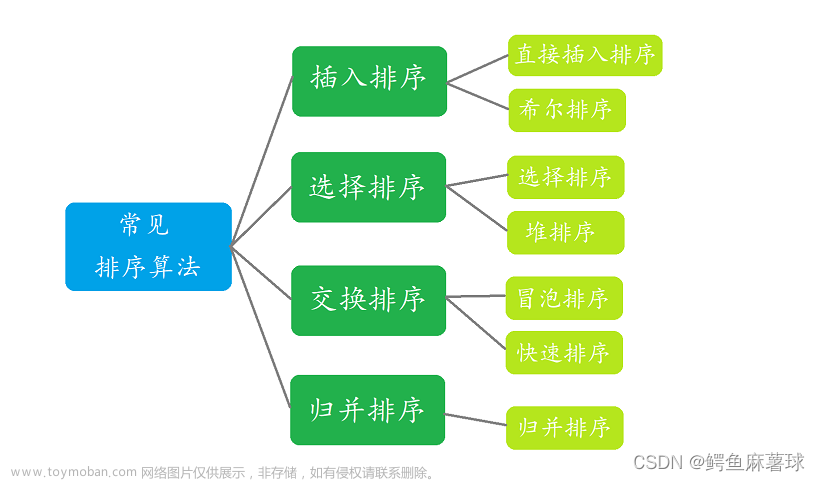
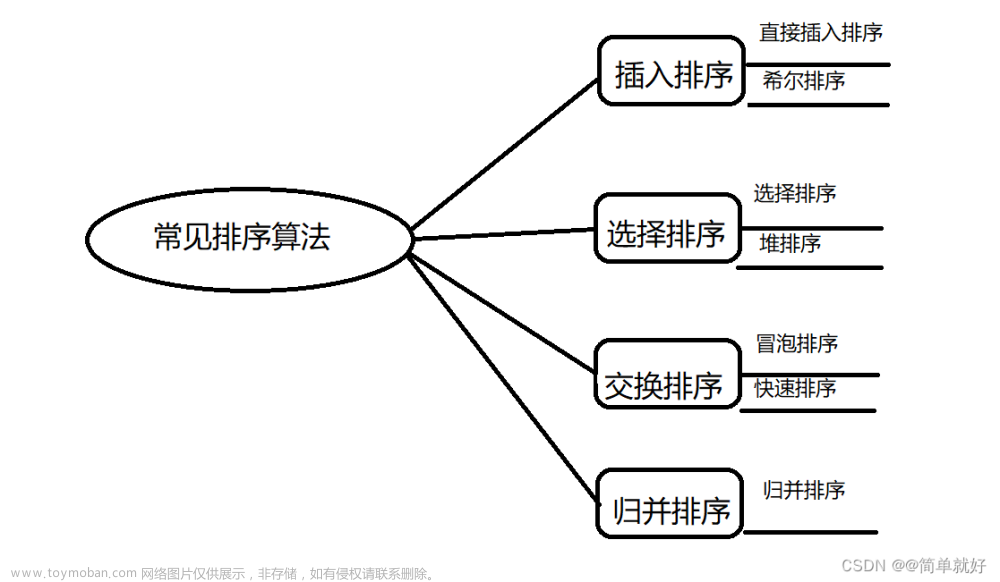
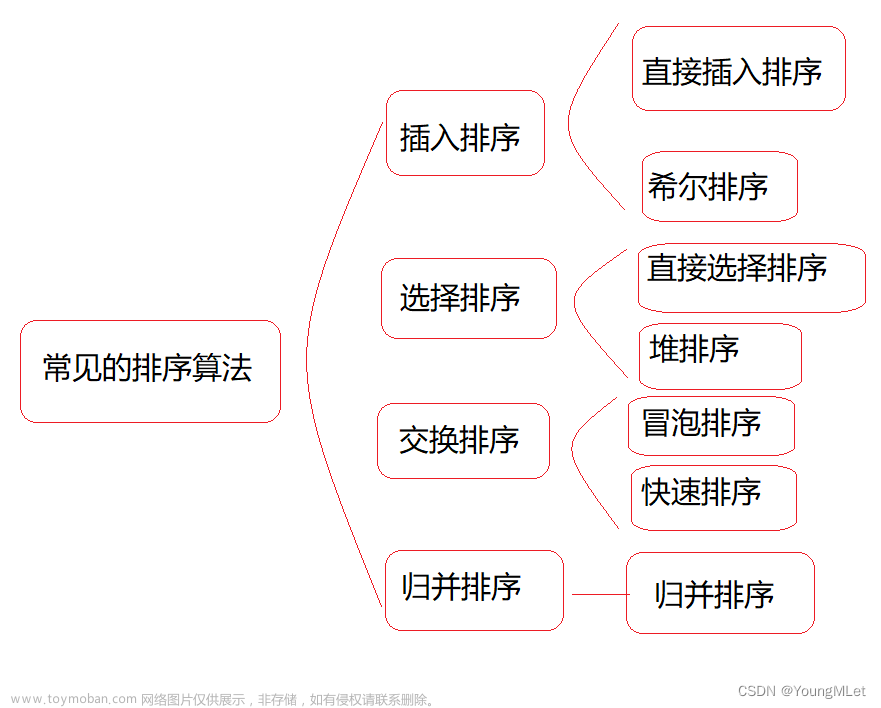
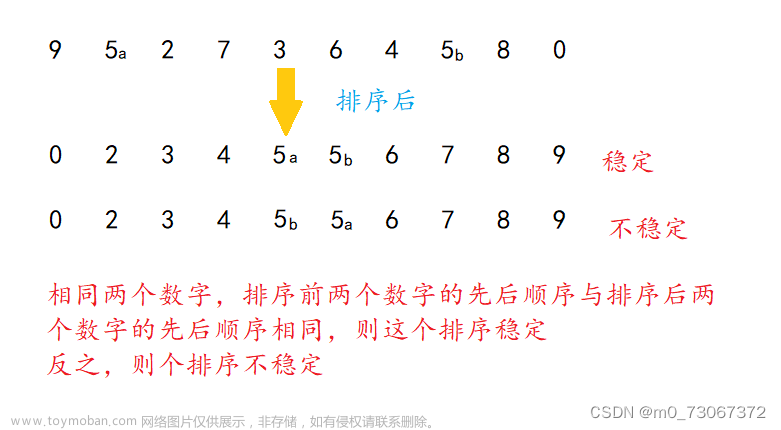
常见的排序算法
常见的七大排序算法:
插入排序之直接插入排序

void InsertOrder(vector<int>& v)
{
for (int i = 0; i < v.size() - 1; ++i)
{
//起始end为0
int end = i ;
//比较的值是下标为end的下一个
int tmp = v[end + 1];
while (end >= 0)
{
//如果end对应的值比tmp大,说明需要进行插入排序
if (v[end] > tmp)
{
v[end + 1] = v[end];
//插入完成后end要向前走
end--;
}
//如果end对应的值比tmp小,说明不需要进行插入,跳出当前while循环,end向后走即可
else
break;
}
//一趟完成后,要将tmp赋给end的下一个位置
v[end + 1] = tmp;
}
}
时间复杂度
最好的情况是O(n),数组为升序
最坏的情况是O(n2),数组为降序
特性总结
- 元素集合越接近有序,直接插入排序算法的时间效率越高
- 时间复杂度:O(N^2)
- 空间复杂度:O(1),它是一种稳定的排序算法
- 稳定性:稳定
插入排序之希尔排序

针对直接插入排序中,当数组属于降序时,时间复杂度太高,设计了希尔排序
设计思路是:当数组降序时,使用分组,可以减小排序次数,逐渐减小分组间隙,当排序次数较多时,数组本身已经快要接近有序了,以此来解决数据降序时排序复杂度高的问题。
因此希尔排序是对直接插入排序的优化
void ShellSort(vector<int>& v)
{
int gap = v.size();
while (gap > 1)
{
gap = gap / 3 + 1;
for (int i = 0; i < v.size() - gap; ++i)
{
int end = i ;
int tmp = v[end + gap];
while (end >= 0)
{
if (v[end] > tmp)
{
v[end + gap] = v[end];
end -= gap;
}
else
break;
}
v[end + gap] = tmp;
}
}
}
时间复杂度
O(n1.25)
选择排序之直接选择排序
设计思路是:
1.从前往后遍历整个数组,拿到当前数组最大和最小值
2.将最小值和第一个元素交换,最大值和最后一个元素交换
3.缩小数组的范围,继续上述的操作
4.直到新数组范围内只有一个元素为止
void swap(int* a, int* b)
{
int tmp = *a;
*a = *b;
*b = tmp;
}
void SelectSort(vector<int>& v)
{
int begin = 0;
int end = v.size() - 1;
while (begin < end)
{
int mini = begin;
int maxi = begin;
for (int i = begin; i <= end; ++i)
{
if (v[mini] > v[i])
mini = i;
if (v[maxi] < v[i])
maxi = i;
}
if (maxi == begin)
maxi = mini;
swap(&v[mini], &v[begin]);
swap(&v[maxi], &v[end]);
begin++;
end--;
}
}
特性总结
- 直接选择排序思考非常好理解,但是效率不是很好。实际中很少使用
- 时间复杂度:O(N^2)
- 空间复杂度:O(1)
- 稳定性:不稳定
选择排序之堆排序
思路:通过使用大堆或者小堆的思路,将数组进行排序
1.排升序建大堆,排降序建小堆
2.升序为例,先建一个大堆(双亲节点都大于左右孩子,根节点的值最大)
3.将数组最后一个位置的值和第一个位置的值交换
4.堆中除了最后一个节点,其余的节点进行调整,调整为新的大堆,将新的大堆的根节点值和倒数第二个节点的值交换
5.以此类推,直到当前新堆的范围为1停止
6.堆排序完成
void adjustDown(int* a, int n, int parent) {
int child = parent * 2 + 1;
while (child < n)
{
if (child+1 < n && a[child] < a[child + 1]) {
child++;
}
if (a[child] > a[parent]) {
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else {
break;
}
}
}
void HeapSort(int* a, int n) {
//1、建堆
//parent = (child-1)/2
for (int i = (n-1-1)/2; i >= 0; i--)
{
adjustDown(a, n, i);
}
//2、堆排序
int end = n - 1;
while (end > 0)
{
Swap(&a[0], &a[end]);
end--;
adjustDown(a, end, 0);
}
}
时间复杂度
O(nlogn)
特性总结
- 堆排序使用堆来选数,效率就高了很多。
- 时间复杂度:O(N*logN)
- 空间复杂度:O(1)
- 稳定性:不稳定
交换排序之冒泡排序
思想:就是从前往后,依次判断当前位置的值和后一个位置的值关系,如果当前值大于后一个位置的值,就进行交换,这样将最大的值就放到的最后面,依次让数组的范围从后往前减小,循环遍历数组,就可完成排序
void BobbleSort(int* v, int size)
{
int exchage = 0;
for (int i = 0; i < size ; ++i)
{
for (int j = 0; j < size - i - 1; ++j)
{
if (v[j] > v[j + 1])
{
swap(v[j], v[j + 1]);
exchage = 1;
}
}
if (exchage == 0)
break;
}
}
特性总结
- 冒泡排序是一种非常容易理解的排序
- 时间复杂度:O(N^2)
- 空间复杂度:O(1)
- 稳定性:稳定
交换排序之快速排序
hoare版本

思想:将某个元素作为基准值,数组被该元素分为两个子数组,左子数组中的值均小于基准值,右子数组中的值均大于基准值,左右子数组重复上述过程,最终实现排序
做法:
1.先设置数组的第一个元素为基准值,设置第一个位置为左,最后一个位置为右
2.右先走,找比基准值小的,左后走,找比基准值大的
3.交换左右两个位置的值
4.右继续向左走,左继续向右走
以上的条件都是在左小于右的基础上进行的
5.如果相遇则将基准值和相遇值交换,函数返回相遇点
int _QuickSort(int* v, int left, int right)
{
int k = left;
while (left < right)
{
//从右往左遍历,找比k小的数
while (left < right && v[right] >= v[k])
{
right--;
}
//从左往右遍历,找比k大的数
while (left < right && v[left] <= v[k])
{
left++;
}
//找到之后,进行交换
swap(&v[left], &v[right]);
}
//如果相遇,将相遇点和数组左边的值交换
swap(&v[left], &v[k]);
return left;
}
void QuickSort(int* v, int left, int right)
{
if (left >= right)
return;
int meet = _QuickSort(v, left, right);
QuickSort(v, left, meet - 1);
QuickSort(v, meet + 1, right);
}
挖坑法

思路:
将某个元素作为基准值,数组被该元素分为两个子数组,左子数组中的值均小于基准值,右子数组中的值均大于基准值,左右子数组重复上述过程,最终实现排序
做法:
1.设置一个坑,hole为最左边的下标,一个key值
2.让右下标向左走,找比key对应值小的,让坑对应的值赋给右下标位置,并且让右下标表示为hole
3.让左下标向右走,找比key对应值大的,让坑对应的值赋给左下标位置,并且让左下标表示为hole
如果遇到左下标大于等于右下标的情况,则将key对应的值赋给相遇点
上述操作是在左小于右的范围下进行的
4.递归进行上述操作
int _QuickSort1(int* v, int left, int right)
{
int hole = left;
int key = v[left];
while (left < right)
{
while (left < right && v[right] >= key)
right--;
v[hole] = v[right];
hole = right;
while (left < right && v[left] <= key)
left++;
v[hole] = v[left];
hole = left;
}
v[left] = key;
return left;
}
void QuickSort1(int* v, int left, int right)
{
if (left >= right)
return;
int meet = _QuickSort1(v, left, right);
QuickSort1(v, left, meet - 1);
QuickSort1(v, meet + 1, right);
}
双指针法

思想:和hoare版本和hole版本相似,都是将当前数组分为两个子数组,递归进行排序
做法:
1.设置key等于数组的左下标,left和right分别是数组的最左和最右,设置prev为左,prev的下一个为cur
2.先让cur向右走,找比key对应的值小的数
3.让prev++,交换prev和cur对应的两个数
4.继续上述操作
5.当cur超出right范围时,停止循环,让key和prev对应的值交换
int _QuickSort2(int* v, int left, int right)
{
int prev = left;
int cur = left + 1;
int key = left;
while (cur <= right)
{
if (v[cur] < v[key])
{
prev++;
swap(&v[prev], &v[cur]);
}
cur++;
}
swap(&v[key], &v[prev]);
return prev;
}
void QuickSort(int* v, int left, int right)
{
if (left >= right)
return;
int meet = _QuickSort2(v, left, right);
QuickSort(v, left, meet - 1);
QuickSort(v, meet + 1, right);
}
快速排序的优化1,增加三数取中

快速排序由于其思想是:根据基准值将数组划分为两个子区间,通过不断的划分子区间将其进行排序,但是当被排序数组是有序的,那么就会退化成下面图示的情况,导致复杂度为O(n2)。
使用三数取中的方式,将数组可以平均二分,从而提高效率
//三数取中算法
int SelectMidIndex(int* v, int left, int right)
{
int mid = left + (right - left) >> 1;
if (v[left] > v[mid])
{
if (v[right] < v[mid])
return mid;
else if (v[right] > v[left])
return left;
else return right;
}
else //v[left] < v[mid]
{
if (v[right] > v[mid])
return mid;
else if (v[right] < v[left])
return left;
else return right;
}
}
//hoare版本
int _QuickSort(int* v, int left, int right)
{
int mid = SelectMid(v, left, right);
swap(v[mid], v[left]);
int k = left;
while (left < right)
{
//从右往左遍历,找比k小的数
while (left < right && v[right] >= v[k])
{
right--;
}
//从左往右遍历,找比k大的数
while (left < right && v[left] <= v[k])
{
left++;
}
//找到之后,进行交换
swap(&v[left], &v[right]);
}
//如果相遇,将相遇点和数组左边的值交换
swap(&v[left], &v[k]);
return left;
}
//hole版本
int _QuickSort1(int* v, int left, int right)
{
int mid = SelectMid(v, left, right);
swap(v[mid], v[left]);
int hole = left;
int key = v[left];
while (left < right)
{
while (left < right && v[right] >= key)
right--;
v[hole] = v[right];
hole = right;
while (left < right && v[left] <= key)
left++;
v[hole] = v[left];
hole = left;
}
v[left] = key;
return left;
}
//双指针法
int _QuickSort2(int* v, int left, int right)
{
int mid = SelectMidIndex(v, left, right);
swap(&v[mid], &v[left]);
int prev = left;
int cur = left + 1;
int key = left;
while (cur <= right)
{
if (v[cur] < v[key] && ++prev != cur)
swap(&v[prev], &v[cur]);
cur++;
}
swap(&v[key], &v[prev]);
return prev;
}
快速排序的优化2,将递归算法改为非递归算法
我们可以将递归的快速排序算法改为非递归的方法,采用栈的数据结构作为辅助
思想:把之前递归版本的方法,通过循环放入栈来实现
做法:
- 将当前数组的左右下标都放入栈中
- 判断栈是否为为空,若不为空,则出栈,进行快速排序获取基准值的位置
- 通过基准值将当前数组再次划分为左右两个子数组
- 判断划分完之后的数组是否需要再次划分(判断条件是数组大小是否为1)
int _QuickSort1()
{
//此处可以使用hoare,hole,双指针法
}
void QuickSort(int* v, int left, int right)
{
stack<int> s;
//先push右边界,再push左边界,这样后序取栈顶元素时的顺序就是左-->右
s.push(right);
s.push(left);
while(!s.empty())
{
int begin = s.top();
s.pop();
int end = s.top();
s.pop();
//此时需要使用快速排序的函数,找中间值
int meet = _QuickSort1(a, begin, end);
//此时本质上是通过meet将数组分为了[begin,meet-1]和[meet+1,end]两部分,需要判断是否继续放入栈中
if(meet-1 > begin)
{
s.push(meet-1);
s.push(begin);
}
if(end > meet + 1)
{
s.push(end);
s.push(meet+1);
}
}
}
快速排序的性能总结
- 快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
- 时间复杂度:O(N*logN)
- 空间复杂度:O(logN)
- 稳定性:不稳定
归并排序
 文章来源:https://www.toymoban.com/news/detail-627262.html
文章来源:https://www.toymoban.com/news/detail-627262.html
思路:采用分治法的思想,将已有的子序列合并,得到完全有序的序列,让每个子序列有序,再让两个有序列表合并为一个有序列表,称为二路归并
做法:文章来源地址https://www.toymoban.com/news/detail-627262.html
- 将一个数组递归分解成左右大小皆为1的数组
- 再对其进行排序(合并两个有序数组)
- 将合并好的数组回写到原数组中
void _MargeSort(int* v, int left, int right, int* tmp)
{
if (left >= right)
return;
int mid = left + (right - left)/2;
_MargeSort(v, left, mid, tmp);
_MargeSort(v, mid + 1, right, tmp);
int begin1 = left;
int end1 = mid;
int begin2 = mid + 1;
int end2 = right;
int index = begin1;
while (begin1 <= end1 && begin2 <= end2)
{
if (v[begin1] < v[begin2])
tmp[index++] = v[begin1++];
else
tmp[index++] = v[begin2++];
}
while(begin1 <= end1)
tmp[index++] = v[begin1++];
while (begin2 <= end2)
tmp[index++] = v[begin2++];
for (int i = left; i <= right; ++i)
v[i] = tmp[i];
}
void MargeSort(int* v, int n)
{
int left = 0;
int right = n-1;
int* tmp = (int*)malloc(n * sizeof(int*));
_MargeSort(v, left, right, tmp);
free(tmp);
}
归并排序特性总结
- 归并的缺点在于需要O(N)的空间复杂度,归并排序的思考更多的是解决在磁盘中的外排序问题。
- 时间复杂度:O(N*logN)
- 空间复杂度:O(N)
- 稳定性:稳定
几种排序算法的复杂度比较
| 排序方法 | 平均情况 | 最好情况 | 最坏情况 | 辅助空间 | 稳定性 |
|---|---|---|---|---|---|
| 直接插入排序 | O(n^2) | O(n) | O(n^2) | O(1) | 稳定 |
| 希尔排序 | O(nlogn–>n^2) | O(n^1.3) | O(n^2) | O(1) | 不稳定 |
| 直接选择排序 | O(n^2) | O(n^2) | O(n^2) | O(1) | 不稳定 |
| 堆排序 | O(nlogn) | O(nlogn) | O(nlogn) | O(1) | 不稳定 |
| 冒泡排序 | O(n^2) | O(n) | O(n^2) | O(1) | 稳定 |
| 快速排序 | O(nlogn) | O(nlogn) | O(n^2) | O(logn) | 不稳定 |
| 归并排序 | O(nlogn) | O(nlogn) | O(nlogn) | O(n) | 稳定 |
到了这里,关于【数据结构】常见的排序算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!