第一篇文章首先介绍平衡小车的硬件组成,对硬件原理图进行详解。
一、硬件结构。
1. 主控板:主控芯片(STM32F103C8T6)+电机驱动芯片(TB6612FNG)。
2. 小车框架:平衡车底盘、带编码器的电机、轮子
3. 电池:狮子航模电池2200mAh11.1V35C,T母头
4. DC-DC降压模块:MP1584EN,3A可调降压稳压电源模块
5. 陀螺仪:MPU6050,检测倾斜角度
6. OLED:4线I2C OLED显示屏
7. 超声波模块:HC-SR04
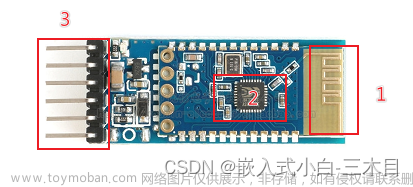
8. 蓝牙:HC-05
二、硬件原理图

三、硬件引脚资源分配文章来源:https://www.toymoban.com/news/detail-627425.html
 文章来源地址https://www.toymoban.com/news/detail-627425.html
文章来源地址https://www.toymoban.com/news/detail-627425.html
到了这里,关于STM32 蓝牙平衡小车(一)硬件原理图的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!