1.材料准备
- STM32F103C8T6最小系统板*1
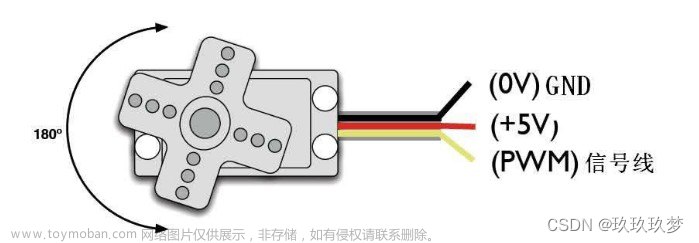
- SG90舵机(180°)*2
- 摇杆按键*1
- 舵机支架*1
- 面包板*1(非必须)
- 杜邦线若干

类似这种的支架,不过需要自己裁切嵌入的部分
代码部分
代码很简单,主要使用ADC双通道读取两个电位器的值(实际上就是电压),通过获取到的值的范围来确定上下左右,从而来改变两个舵机的角度。
ps2_joystick.c
#include "ps2_joystick.h"
void Joystick_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置PA2和PA3引脚为模拟输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 使能ADC1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
// 配置ADC1参数
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
// 配置ADC1通道2(电位器1)为采样序列1
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 1, ADC_SampleTime_55Cycles5);
// 配置ADC1通道3(电位器2)为采样序列2
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 2, ADC_SampleTime_55Cycles5);
// 使能ADC1
ADC_Cmd(ADC1, ENABLE);
}
uint16_t Read_ADC_Value(uint8_t channel) {
ADC_RegularChannelConfig(ADC1, channel, 1, ADC_SampleTime_55Cycles5);
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}
void Servo_Configuration(void) {
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
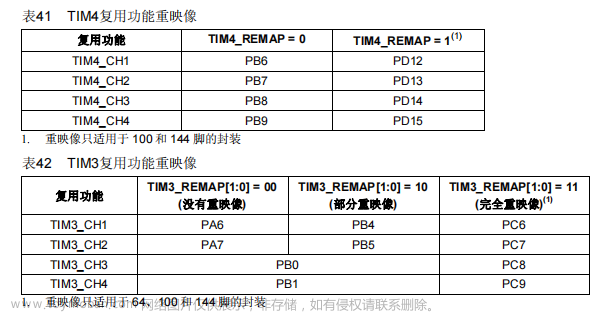
// 配置PB8和PB9引脚为复用推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 使能TIM4时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
// 配置定时器4的基本参数
TIM_TimeBaseStructure.TIM_Period = 19999; // 20ms周期
TIM_TimeBaseStructure.TIM_Prescaler = 71; // 分频系数,72MHz时钟
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
// 配置定时器4的通道3和通道4为PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
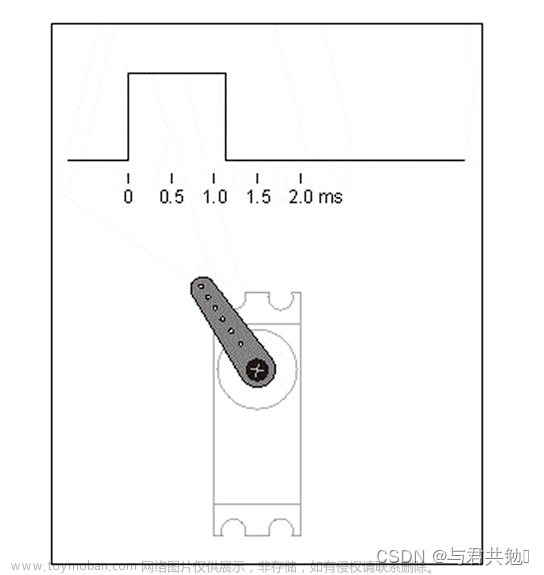
TIM_OCInitStructure.TIM_Pulse = 1500; // 初始脉冲宽度为1.5ms(中间位置)
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM4, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC4Init(TIM4, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable);
// 启动定时器4
TIM_Cmd(TIM4, ENABLE);
}
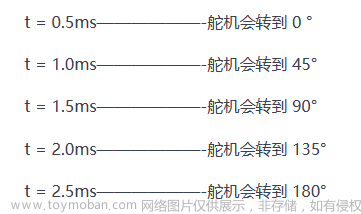
void Set_Servo_Angle(u8 angle1, u8 angle2){
u16 position1 = 500 + (2000 /180 * angle1);
u16 position2 = 500 + (2000 /180 * angle2);
TIM_SetCompare3(TIM4, position1); // 设置通道3的脉冲宽度
TIM_SetCompare4(TIM4, position2); // 设置通道4的脉冲宽度
}
ps2_joystick.h
#ifndef __PS2_JOYSTICK_H_
#define __PS2_JOYSTICK_H_
#include "stm32f10x.h"
#include "sys.h"
void Joystick_Init(void);//摇杆按键初始化
uint16_t Read_ADC_Value(uint8_t channel);//获取AD转换数据
void Servo_Configuration(void);
void Set_Servo_Angle(u8 angle1, u8 angle2);
#endif /* __PS2_JOYSTICK_H_ */
main.c
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "ps2_joystick.h"
/********IO配置*******
A2 - URy
A3 - URx
B8 - 舵机下
B9 - 舵机上
**********************/
// 定义全局变量用于保存摇杆的X和Y轴数值
volatile int16_t VRxData = 0;
volatile int16_t VRyData = 0;
u8 Angle1 = 90;
u8 Angle2 = 90;
u8 AngleSpeed = 5;//每次改变舵机的角度,需要保证改后的范围在0-180度
int main(void)
{
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LedInit();
Joystick_Init();
Servo_Configuration();
// 进入主循环
while (1)
{
// 读取X轴和Y轴的数值 5V电源读取的数值范围为0-5000
VRyData = Read_ADC_Value(ADC_Channel_3);
VRxData = Read_ADC_Value(ADC_Channel_2);
// 处理摇杆的数值
if(VRxData < 1500){ //右
//--
if(Angle1 < 180) Angle1 += AngleSpeed; //控制舵机
}
else if(VRxData > 3500){//左
//++
if(Angle1 > 0) Angle1 -= AngleSpeed;
}
if(VRyData < 1500){ //上
if(Angle2 > 0) Angle2 -= AngleSpeed;
}
else if(VRyData > 3500){ //下
if(Angle2 < 180) Angle2 += AngleSpeed;
}
Set_Servo_Angle(Angle1,Angle2);
// ...
delay_ms(50);
}
}
//改变if语言与VRyData等 比较的值可以提高摇杆按键的灵敏度(即小幅度变化即可触发舵机运行)
通过改变if语言中与VRyData等 比较的值可以提高摇杆按键的灵敏度(即小幅度变化即可触发舵机运行)文章来源:https://www.toymoban.com/news/detail-628415.html
演示视频
摇杆控制舵机云台文章来源地址https://www.toymoban.com/news/detail-628415.html
到了这里,关于摇杆按键+SG90 实现舵机云台(STM32F103C8T6)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!