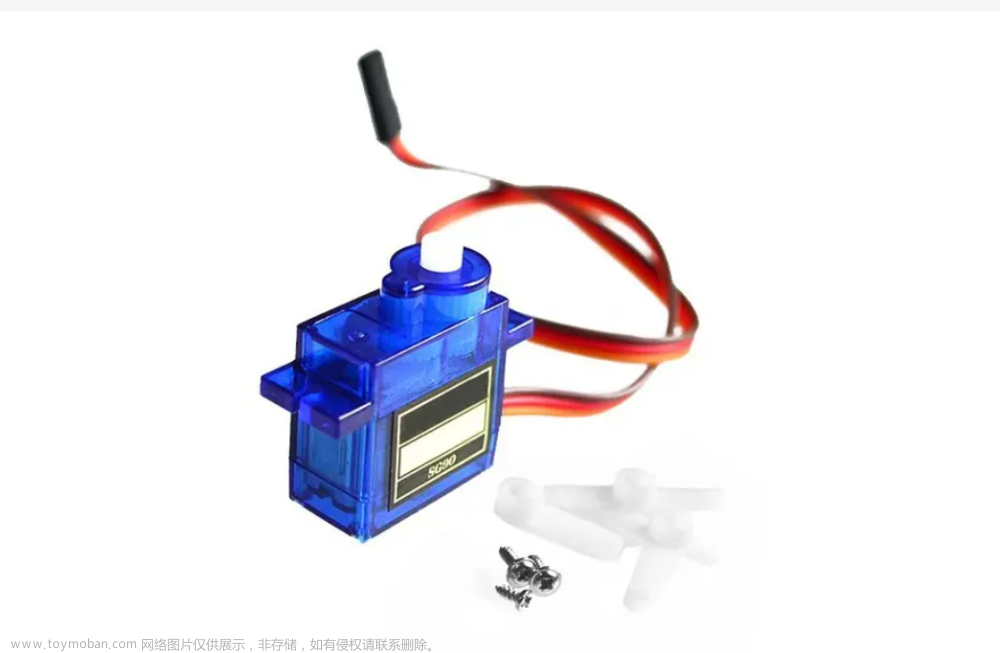
一、什么是舵机?

产品参数
名称:9克舵机180度
尺寸:23mm X 12.2mm X 29mm
重量:9克
扭矩:1.5kg/cm
工作电压:4.2 - 6V
温度范围:0 - 55℃
运行速度:0.3s/60℃
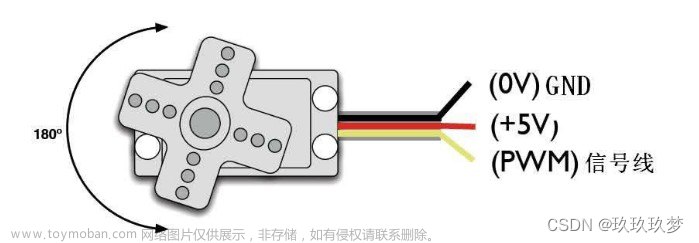
死带宽:10ms舵机有三条线定义:
- 暗灰:GND
- 红色:VCC 4.8V - 7.2V
- 橙黄线:脉冲输入
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
二、工作原理
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
舵机控制:
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
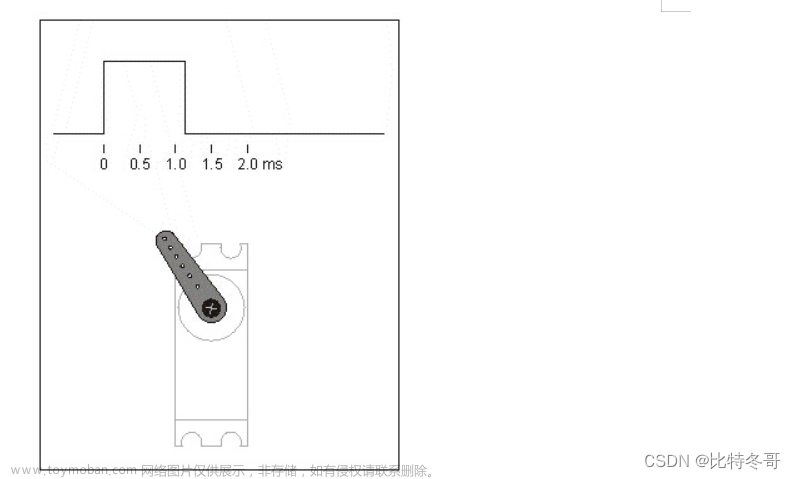
这只是一种参考数值,具体的参数,请参见舵机的技术参数。
小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。
要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。
使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。
为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。主要还是 delay memory这样的具有创造性的指令发挥了功效。该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只用一个存储空间来存储延时参数好像还不够用的,所以我们可以采用2个内存单元来存放舵机的角度伺服参数了。所以这样一来,我们可以采用这样的软件结构了:
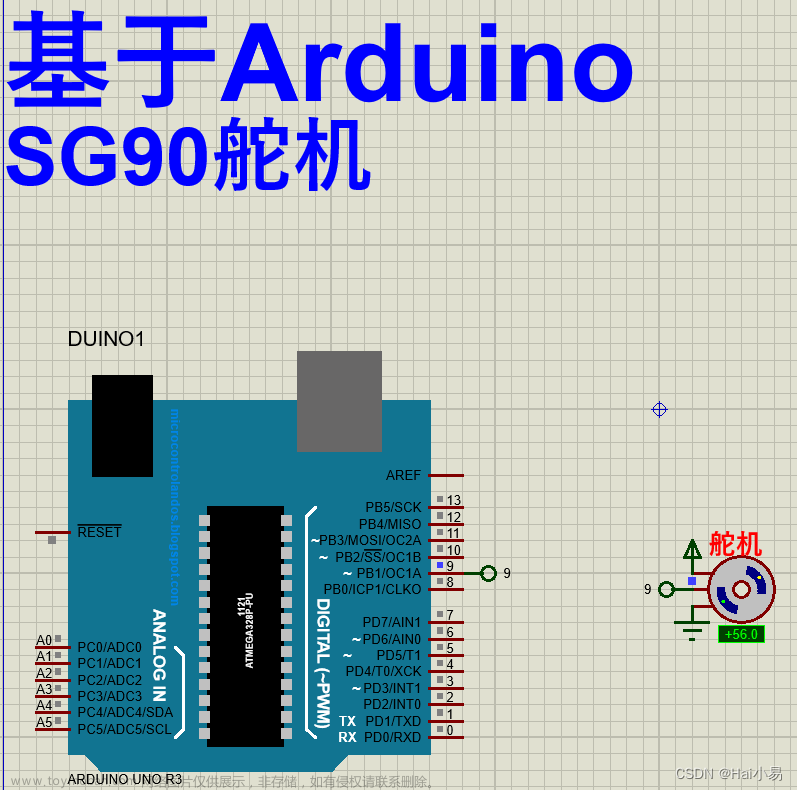
三、利用PWM控制
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如下图所示
单片机实现舵机转角控制
可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
为保证软件在定时中断里采集其他信号,并且使发生PWM信号的程序不影响中断程序的运行(如果这些程序所占用时间过长,有可能会发生中断程序还未结束,下次中断又到来的后果),所以需要将采集信号的函数放在长定时中断过程中执行,也就是说每经过两次中断执行一次这些程序,执行的周期还是20ms。软件流程如下图所示。
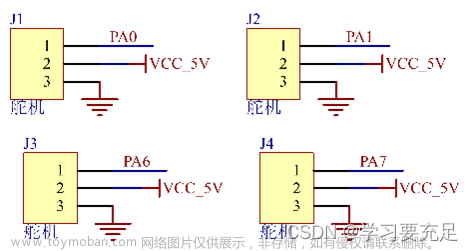
如果系统中需要控制几个舵机的准确转动,可以用单片机和计数器进行脉冲计数产生PWM信号。
脉冲计数可以利用单片机的内部计数器来实现,但是从软件系统的稳定性和程序结构的合理性看,宜使用外部的计数器,还可以提高CPU的工作效率。实验后从精度上考虑,对于FUTABA系列的接收机,当采用1MHz的外部晶振时,其控制电压幅值的变化为0.6mV,而且不会出现误差积累,可以满足控制舵机的要求。最后考虑数字系统的离散误差,经估算误差的范围在±0.3%内,所以采用单片机和8253、8254这样的计数器芯片的PWM信号产生电路是可靠的。下图是硬件连接图。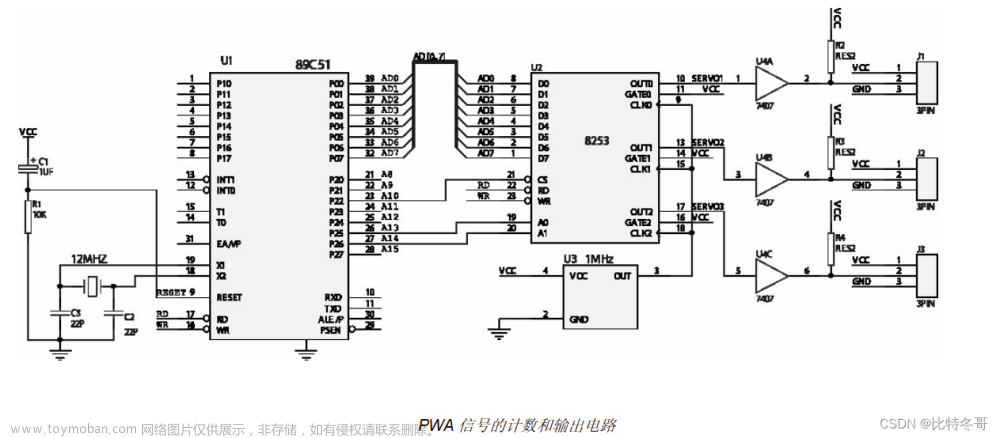
四、stm32舵机控制
1. PWM设计
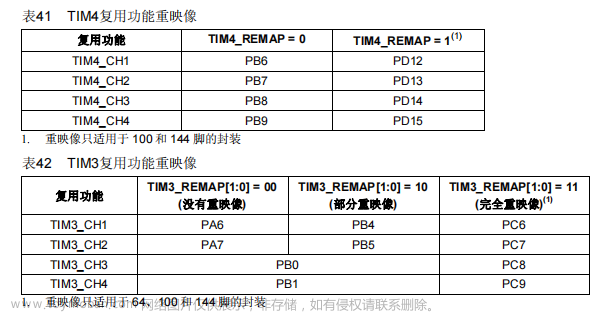
TIM1 -> CH1 PA8文章来源:https://www.toymoban.com/news/detail-628740.html
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据 TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能
TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
2.steering engine文章来源地址https://www.toymoban.com/news/detail-628740.html
TIM1_PWM_Init(1999,719); // 72000000/720/2000=20ms
IM_SetCompare1(TIM1,1950); //对应0度 2.5%
delay_ms(1000);
TIM_SetCompare1(TIM1, 1900); //对应45度 5%
delay_ms(1000);
TIM_SetCompare1(TIM1, 1850); //对应90度 7.5%
delay_ms(1000);
TIM_SetCompare1(TIM1, 1800); //对应135度 10%
delay_ms(1000);
TIM_SetCompare1(TIM1,1750); //对应180度 12.5%
delay_ms(1000);
到了这里,关于基于STM32 SG90 9g舵机控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!