引言
- 这里翻译了HiFi-GAN这篇论文的具体内容,具体链接。
- 这篇文章还是学到了很多东西,从整体上说,学到了生成对抗网络的构建思路,包括生成器和鉴定器。细化到具体实现的细节,如何 实现对于特定周期的数据处理?在细化,膨胀卷积是如何实现的?这些通过文章,仅仅是了解大概的实现原理,但是对于代码的实现细节并不是很了解。如果要加深印象,还是要结合代码来具体看一下实现的细节。
- 本文主要围绕具体的代码实现细节展开,对于相关原理,只会简单引用和讲解。因为官方代码使用的是pytorch,所以是通过pytorch展开的。
- 关于模型其他部分的介绍,链接如下
- 论文代码学习(1)—HiFi-GAN——生成器generator代码
- 论文代码学习—HiFi-GAN(2)——鉴别器discriminator代码
- 论文代码学习—HiFi-GAN(3)——模型loss函数解析
- 当前文章,主要是围绕模型的训练文件展开,训练文件也是调用整个模型,导入数据,进行训练并保存模型的主要文件,定义了前向传播,反向传播,loss计算过程等十分重要的内容。这里主要分模块讲解train文件的训练。
正文
- 整个train文件需要完成调用模型,加载数据进行训练和对训练结果进行记录等功能,是主要的运行程序。具体功能如下:
- 模型定义:定义生成器和判别器
- 指定优化器和学习率:指定AdamW优化器,并定义指数学习率调度器
- 数据加载:使用Dataloader加载训练和验证数据
- 定义训练过程:指定前向传播、loss计算和反向传播的过程
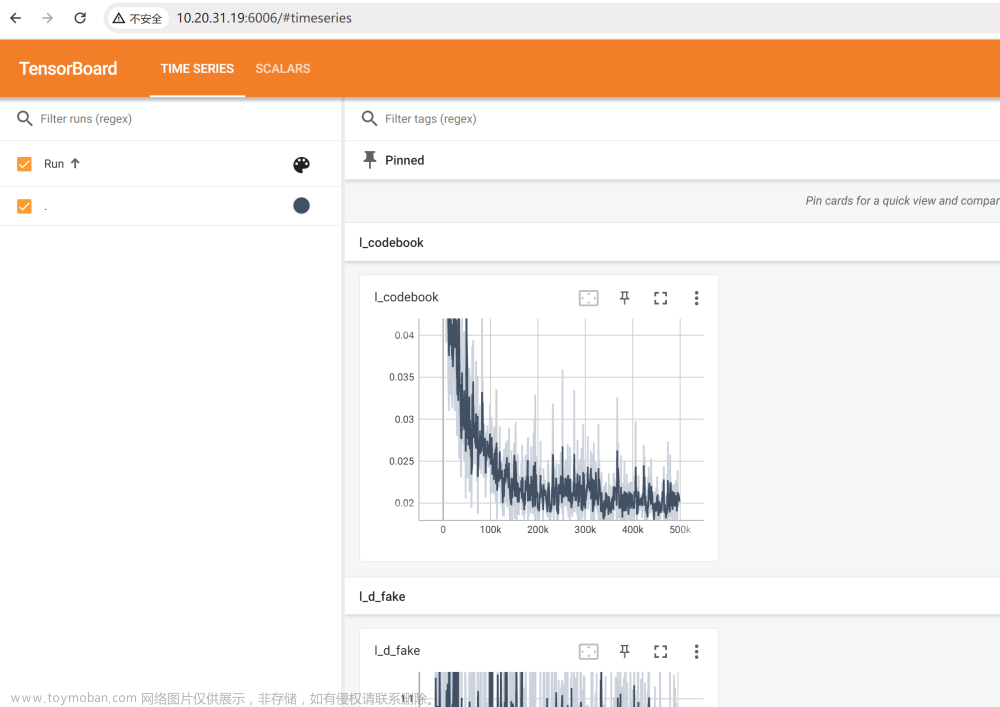
- 验证和日志记录:模型测试,并使用TensorBoard记录训练过程
- 整体的训练文件代码太多了,并且牵扯到很多分布式训练的过程,所以这里是先提出和模型相关的代码,然后在分布式训练的代码进行学习.
模型训练代码
-
这部分主要是按照模型一个模型具体的训练过程展开的,主要是按照如下步骤
- 创建模型的实例对象
- 定义模型训练优化器
- 定义学习率调度优化器(根据上一步进行定义)
- 加载训练数据
- 将模型定义为训练模式
- 遍历数据并移动到设备
- 梯度归零
- 前向传播
- 计算损失
- 反向传播和梯度更新
- 更新学习率调度器
-
但是实际上作者在训练的过程中,并不是严格按照这个步骤进行更新的,他是先训练了鉴定器,然后在训练生成器的过程中又重新对鉴定器进行了一次前向传播,使用鉴定器的结果输出,来反向传播影响生成器的权重.
整体训练过程
- 两次的计算图不一样哦,现实单独优化计算生成器,然后第二次是当作整体进行计算的,然后整体优化生成器的权重.

具体训练细节
-
1 创建模型实例对象
- 首先创建对应生成器,判别器的实例对象,并且将之放置到设备上
# 创建生成器和鉴定器,并将之放置在设备上
generator = Generator(h).to(device)
mpd = MultiPeriodDiscriminator().to(device)
msd = MultiScaleDiscriminator().to(device)
-
2 定义模型训练优化器
- 指定鉴定器和生成器的优化器是AdamW
- AdamW是Adam的一种变体,是在Adam上引入了权重衰减的修正.
- 注意:在声明优化器时都需要传入需要影响的模型参数,对于鉴定器而言,这里就给优化器传入了两个模型的参数
optim_g = torch.optim.AdamW(generator.parameters(), h.learning_rate, betas=[h.adam_b1, h.adam_b2])
# 注意这里,判别器的优化器会影响多尺度判别器MSD和多周期判别器MPD
optim_d = torch.optim.AdamW(itertools.chain(msd.parameters(), mpd.parameters()),h.learning_rate, betas=[h.adam_b1, h.adam_b2])
- torch.optim.AdamW的参数说明

-
3 定义学习率调度器
- 在训练过程中,动态调整学习率,以便能够更好地训练模型.这两个调度器适用于生成器和判别器两个优化器,
- ExponentialLR:指数衰减学习率调度器,在每一个epoch后乘以一个给定的常数因子
- 调用学习率参数调度器时,需要指定模型对应的优化器
scheduler_g = torch.optim.lr_scheduler.ExponentialLR(optim_g, gamma=h.lr_decay, last_epoch=last_epoch)
scheduler_d = torch.optim.lr_scheduler.ExponentialLR(optim_d, gamma=h.lr_decay, last_epoch=last_epoch)
-
4 加载训练数据
- 项目中,并没有直接的mel频谱图,是将音频转换成mel频谱图的,所以具体步骤如下
- 读取音频文件,将音频文件转为mel频谱图,创建DataLoader数据加载对象
- 项目中,并没有直接的mel频谱图,是将音频转换成mel频谱图的,所以具体步骤如下
# 获取训练文件的列表
training_filelist, validation_filelist = get_dataset_filelist(a)
# 将音频文件转为mel频谱图
trainset = MelDataset(training_filelist, h.segment_size, h.n_fft, h.num_mels,
h.hop_size, h.win_size, h.sampling_rate, h.fmin, h.fmax, n_cache_reuse=0,
shuffle=False if h.num_gpus > 1 else True, fmax_loss=h.fmax_for_loss, device=device,
fine_tuning=a.fine_tuning, base_mels_path=a.input_mels_dir)
# 创建DataLoader数据加载对象
train_loader = DataLoader(trainset, num_workers=h.num_workers, shuffle=False,
sampler=train_sampler,
batch_size=h.batch_size,
pin_memory=True,
drop_last=True)
# 创建验证集的数据加载对象
validset = MelDataset(validation_filelist, h.segment_size, h.n_fft, h.num_mels,
h.hop_size, h.win_size, h.sampling_rate, h.fmin, h.fmax, False, False, n_cache_reuse=0,
fmax_loss=h.fmax_for_loss, device=device, fine_tuning=a.fine_tuning,
base_mels_path=a.input_mels_dir)
validation_loader = DataLoader(validset, num_workers=1, shuffle=False,
sampler=None,
batch_size=1,
pin_memory=True,
drop_last=True)
-
5 将模型指定为训练模式
- pytorch中模型有两种模式,分别是训练模式(training model)和评估模式(evaluation mode)
-
训练模式 training mode:
- Dropout层会将一些神经元输出设置为0
- BatchNorm层会使用mini-batch的统计数据进行归一化
-
评估模式 evaluation mode
- Dropout层不会改变任何神经元的输出
- BatchNorm层会使用整个训练集的统计数据进行归一化
- 在这里,需要对模型进行训练,所以需要将模型的模式设置为train
# 设置模型为训练模式
generator.train()
mpd.train()
msd.train()
-
6 循环遍历数据并移动到设备
- 功能描述:
- 遍历数据中的每一个batch,然后将数据移动到设备上
- 知识补充:
- 在pytorch中,需要将数据封装成variable变量,才能放到设备上参与训练
- unsqueeze是将給数据在增加一个维度,使y和其他的数据维度一致
- 非阻塞模式:快速相应,某些操作没有完成,立刻返回,不会陷入阻塞等待
- 功能描述:
# 遍历数据批次
for i, batch in enumerate(train_loader):
# 判定是否为主线程
if rank == 0:
start_b = time.time()
# 从当前的批次中获取输入数据x,目标输出y,以及梅尔频谱图y_mel
x, y, _, y_mel = batch
# 将所有的数据封装为pytorch的变量Variable对象,并将之移动到指定的设备上
x = torch.autograd.Variable(x.to(device, non_blocking=True))
y = torch.autograd.Variable(y.to(device, non_blocking=True))
y_mel = torch.autograd.Variable(y_mel.to(device, non_blocking=True))
# 调整目标输出的维度,增加了目标输出y的维度,确保y和模型的输出y_hat的维度一致
y = y.unsqueeze(1)
-
7 梯度清零
- 在每一次训练之前,都需要将模型梯度清零,避免梯度的累积
# 判别器梯度清零
optim_d.zero_grad()
# Generator
# 生成器梯度清零
optim_g.zero_grad()
-
8 前向传播
- 前向传播分为三个部分
- 生成器调用mel频谱图生成波形图y_g_hat
- 多周期判别器接受y_g_hat(生成器生成波形图),
- y_df_hat_r表示对于真实数据的判别结果,
- y_df_hat_g表示对于生成数据的判别结果
- 多尺度判别器接受y_g_hat(生成器生成波形图)
- y_ds_hat_r表示对于真实数据的判别结果,
- y_ds_hat_g表示对于生成数据的判别结果
- 前向传播分为三个部分
# 生成器生成结果
y_g_hat = generator(x)
# 多周期判别器生成结果
y_df_hat_r, y_df_hat_g, _, _ = mpd(y, y_g_hat.detach())
# 多尺度判别器生成结果
y_ds_hat_r, y_ds_hat_g, _, _ = msd(y, y_g_hat.detach())
-
9 计算损失
- 两部分损失
- 生成器损失:mel损失+特征匹配损失+最小二乘损失
- 注意,生成器的损失也是根据判别器进行确定,是两个判别器损失之和
- 判别器损失:msd多尺度判别器损失+mpd多周期判别器损失
- 生成器损失:mel损失+特征匹配损失+最小二乘损失
- 两部分损失
# 将生成器的生成的波形图y_g_hat生成为对应mel频谱图
y_g_hat_mel = mel_spectrogram(y_g_hat.squeeze(1), h.n_fft, h.num_mels, h.sampling_rate, h.hop_size, h.win_size,h.fmin, h.fmax_for_loss)
# L1 Mel-Spectrogram Loss
# 生成器的L1损失
loss_mel = F.l1_loss(y_mel, y_g_hat_mel) * 45
# 计算两个判别器的损失
# loss_disc_f是多周期判别器的损失
# loss_disc_s是多尺度判别器的损失
# losses_disc_f_r, losses_disc_f_g分别是每一层的多周期鉴定器对于真实数据和生成数据判别结果
# losses_disc_s_r, losses_disc_s_g 分别是每一层的多尺度鉴定器对于真实数据和生成数据判别结果
loss_disc_f, losses_disc_f_r, losses_disc_f_g = discriminator_loss(y_df_hat_r, y_df_hat_g)
loss_disc_s, losses_disc_s_r, losses_disc_s_g = discriminator_loss(y_ds_hat_r, y_ds_hat_g)
loss_disc_all = loss_disc_s + loss_disc_f
# 计算生成器损失,包括mel频谱图的L1损失\特征匹配损失和生成器损失
y_df_hat_r, y_df_hat_g, fmap_f_r, fmap_f_g = mpd(y, y_g_hat)
y_ds_hat_r, y_ds_hat_g, fmap_s_r, fmap_s_g = msd(y, y_g_hat)
loss_fm_f = feature_loss(fmap_f_r, fmap_f_g)
loss_fm_s = feature_loss(fmap_s_r, fmap_s_g)
loss_gen_f, losses_gen_f = generator_loss(y_df_hat_g)
loss_gen_s, losses_gen_s = generator_loss(y_ds_hat_g)
loss_gen_all = loss_gen_s + loss_gen_f + loss_fm_s + loss_fm_f + loss_mel
-
注意:
- 下面关于判别器前向传播的两次使用目的不同
- mpd(y, y_g_hat)和msd(y, y_g_hat)
- 上面的并没有将y_g_hat从计算图中剥离出来,是通过鉴定器的反馈来影响计算生成器的权重
- mpd(y, y_g_hat.detach())和msd(y, y_g_hat.detach())
- 上面将y_g_hat从计算图中剥离出来,是单纯训练鉴定器的权重参数
-
10 反向传播和梯度更新
- 计算完对应的权重之后,在进行反向传播,然后进行梯度更新
# 反向传播鉴别器的损失
loss_disc_all.backward()
# 梯度更新
optim_d.step()
# 反向传播生成器的损失
loss_gen_all.backward()
# 执行梯度优化
optim_g.step()
-
11 更新学习率调度器
- 更新学习率
# 更新学习率调度器
scheduler_g.step()
scheduler_d.step()
具体运行流程
- 具体如下图,绿色的是专门用来对判别器的参数进行优化的,蓝色的是专门用来对生成器的参数进行优化的.
- 可以看到调用了两次msd判别器和mpd判别器对模型进行优化,但是效果不一样
- 第一次调用是绿框
- 分别对两个判别器进行了误差计算和反向传播,并且更新模型参数,但是传入y_g_hat时使用detach
- 在更新判别器的权重时,需要固定生成器的权重,防止相互影响
- 分别对两个判别器进行了误差计算和反向传播,并且更新模型参数,但是传入y_g_hat时使用detach
- 第二次调用是蓝框
- 仅仅是单纯调用了两个判别器进行前向传播**,并没有进行误差计算和反向传播**
- 根据两个判别器的反馈,来更新生成器的权重,需要计算与y_h_hat的梯度
- 仅仅是单纯调用了两个判别器进行前向传播**,并没有进行误差计算和反向传播**
- 第一次调用是绿框

多GPU编程
-
在这个项目的代码中,写了多个GPU同时训练的代码,这里并不是重点,但是还是用来学习使用一下.
-
1 使用多线进程进行训练
- 可以使用torch.multiprocessing管理多进程的训练,具体使用如下
import torch.multiprocessing as mp
def train(rank):
# 训练模型的代码
if __name__ == '__main__':
mp.spawn(train, nprocs=num_gpus)
-
2 实现数据的分布式并行训练
- DistributedDataParallel(DDP)实现了分布式数据并行训练。DDP通过分割mini-batch并将工作分配给多个设备来实现。
if h.num_gpus > 1:
generator = DistributedDataParallel(generator, device_ids=[rank]).to(device)
mpd = DistributedDataParallel(mpd, device_ids=[rank]).to(device)
msd = DistributedDataParallel(msd, device_ids=[rank]).to(device)
-
3 多进程中的进程编号和分类文章来源:https://www.toymoban.com/news/detail-628811.html
- 分布式训练中,每一个进程都有一个唯一的标识符,称为"秩",rank
- rank = 0;表示主进程,执行特殊人物,用于日志记录, 检查点保存 ,验证等. 其他进程只负责训练
- 通过检查rank == 0,代码确保某些操作(例如打印训练进度、保存模型检查点等)只在主进程中执行一次,而不是在每个进程中都执行。这有助于避免重复的日志记录和其他可能的冲突。
- 在分布式训练中,所有进程通常并行运行相同的代码,但通过使用秩,可以在不同的进程中实现不同的行为。这是一种常见的编程模式,用于确保分布式系统的协调和效率。
-
到此为止吧,这里暂时不做过多的解释,他的代码直接可以使用,因为那个代码包含了多GPU和单GPU训练的代码, 是兼容的.可以直接使用.文章来源地址https://www.toymoban.com/news/detail-628811.html
main函数(通用代码)
- 基本上在好多项目中,都看到了下面的代码,检测有几个GPU,然后进行多GPU的训练。加载参数进行训练,然后直接命令行调用。这样很高校,将所有的文件都集中在一个地方。
def main():
print('Initializing Training Process..')
parser = argparse.ArgumentParser()
# 加载并解析参数
# group_name表示分组名称
parser.add_argument('--group_name', default=None)
# input_wavs_dir表示输入的音频文件夹
parser.add_argument('--input_wavs_dir', default='LJSpeech-1.1/wavs')
# input_mels_dir表示输入的mel谱文件夹
parser.add_argument('--input_mels_dir', default='ft_dataset')
# input_training_file表示输入的训练文件
parser.add_argument('--input_training_file', default='LJSpeech-1.1/training.txt')
# input_validation_file表示输入的验证文件
parser.add_argument('--input_validation_file', default='LJSpeech-1.1/validation.txt')
# checkpoint_path表示检查点路径
parser.add_argument('--checkpoint_path', default='cp_hifigan')
# config表示配置文件
parser.add_argument('--config', default='')
# training_epoches训练的总周期数。默认值为3100。
parser.add_argument('--training_epochs', default=3100, type=int)
# stdout_interval: 标准输出日志的间隔步数。默认值为5。
parser.add_argument('--stdout_interval', default=5, type=int)
# checkpoint_interval: 检查点保存的间隔步数。默认值为5000。
parser.add_argument('--checkpoint_interval', default=5000, type=int)
# summary_interval: TensorBoard摘要记录的间隔步数。默认值为100。
parser.add_argument('--summary_interval', default=100, type=int)
# validation_interval: 验证的间隔步数。默认值为1000。
parser.add_argument('--validation_interval', default=1000, type=int)
# fine_tuning: 是否进行微调。默认值为False。
parser.add_argument('--fine_tuning', default=False, type=bool)
a = parser.parse_args()
# 读取配置文件
with open(a.config) as f:
data = f.read()
# 解析json文件
json_config = json.loads(data)
# 将json文件转换为字典
h = AttrDict(json_config)
# 根据配置文件创建对应文件
build_env(a.config, 'config.json', a.checkpoint_path)
# 设置随机种子,确保训练的可重复性
torch.manual_seed(h.seed)
# 检测GPU,如果多个GPU就同时训练
if torch.cuda.is_available():
torch.cuda.manual_seed(h.seed)
h.num_gpus = torch.cuda.device_count()
h.batch_size = int(h.batch_size / h.num_gpus)
print('Batch size per GPU :', h.batch_size)
else:
pass
if h.num_gpus > 1:
# 多个GPU的训练方式
mp.spawn(train, nprocs=h.num_gpus, args=(a, h,))
else:
# 一个GPU的训练方式
train(0, a, h)
完整代码
import warnings
warnings.simplefilter(action='ignore', category=FutureWarning)
import itertools
import os
import time
import argparse
import json
import torch
import torch.nn.functional as F
from torch.utils.tensorboard import SummaryWriter
from torch.utils.data import DistributedSampler, DataLoader
import torch.multiprocessing as mp
from torch.distributed import init_process_group
from torch.nn.parallel import DistributedDataParallel
from env import AttrDict, build_env
from meldataset import MelDataset, mel_spectrogram, get_dataset_filelist
from models import Generator, MultiPeriodDiscriminator, MultiScaleDiscriminator, feature_loss, generator_loss,\
discriminator_loss
from utils import plot_spectrogram, scan_checkpoint, load_checkpoint, save_checkpoint
torch.backends.cudnn.benchmark = True
def train(rank, a, h):
# 基本步骤:多个GPU,则初始化分布训练组
if h.num_gpus > 1:
init_process_group(backend=h.dist_config['dist_backend'], init_method=h.dist_config['dist_url'],
world_size=h.dist_config['world_size'] * h.num_gpus, rank=rank)
# 基本步骤:初始化随机种子
torch.cuda.manual_seed(h.seed)
# 基本步骤:设备命名
device = torch.device('cuda:{:d}'.format(rank))
# 创建生成器和鉴定器,并将之放置在设备上
generator = Generator(h).to(device)
mpd = MultiPeriodDiscriminator().to(device)
msd = MultiScaleDiscriminator().to(device)
# 如果是主进程,就打印生成器并且创建检查点目录
if rank == 0:
print(generator)
os.makedirs(a.checkpoint_path, exist_ok=True)
print("checkpoints directory : ", a.checkpoint_path)
# 检查是否存在检查点,如果存在则加载检查点??
# 这里的加载检查点是什么意思??
if os.path.isdir(a.checkpoint_path):
cp_g = scan_checkpoint(a.checkpoint_path, 'g_')
cp_do = scan_checkpoint(a.checkpoint_path, 'do_')
steps = 0
if cp_g is None or cp_do is None:
state_dict_do = None
last_epoch = -1
else:
state_dict_g = load_checkpoint(cp_g, device)
state_dict_do = load_checkpoint(cp_do, device)
generator.load_state_dict(state_dict_g['generator'])
mpd.load_state_dict(state_dict_do['mpd'])
msd.load_state_dict(state_dict_do['msd'])
steps = state_dict_do['steps'] + 1
last_epoch = state_dict_do['epoch']
# 如果有多个GPU,就是用分布式数据并行
if h.num_gpus > 1:
generator = DistributedDataParallel(generator, device_ids=[rank]).to(device)
mpd = DistributedDataParallel(mpd, device_ids=[rank]).to(device)
msd = DistributedDataParallel(msd, device_ids=[rank]).to(device)
# 定义优化器
optim_g = torch.optim.AdamW(generator.parameters(), h.learning_rate, betas=[h.adam_b1, h.adam_b2])
optim_d = torch.optim.AdamW(itertools.chain(msd.parameters(), mpd.parameters()),
h.learning_rate, betas=[h.adam_b1, h.adam_b2])
# 如果存在检查点,就加载优化器的状态
if state_dict_do is not None:
optim_g.load_state_dict(state_dict_do['optim_g'])
optim_d.load_state_dict(state_dict_do['optim_d'])
# 定义学习率调度器
scheduler_g = torch.optim.lr_scheduler.ExponentialLR(optim_g, gamma=h.lr_decay, last_epoch=last_epoch)
scheduler_d = torch.optim.lr_scheduler.ExponentialLR(optim_d, gamma=h.lr_decay, last_epoch=last_epoch)
training_filelist, validation_filelist = get_dataset_filelist(a)
trainset = MelDataset(training_filelist, h.segment_size, h.n_fft, h.num_mels,
h.hop_size, h.win_size, h.sampling_rate, h.fmin, h.fmax, n_cache_reuse=0,
shuffle=False if h.num_gpus > 1 else True, fmax_loss=h.fmax_for_loss, device=device,
fine_tuning=a.fine_tuning, base_mels_path=a.input_mels_dir)
# 创建分布式采样器
train_sampler = DistributedSampler(trainset) if h.num_gpus > 1 else None
train_loader = DataLoader(trainset, num_workers=h.num_workers, shuffle=False,
sampler=train_sampler,
batch_size=h.batch_size,
pin_memory=True,
drop_last=True)
if rank == 0:
validset = MelDataset(validation_filelist, h.segment_size, h.n_fft, h.num_mels,
h.hop_size, h.win_size, h.sampling_rate, h.fmin, h.fmax, False, False, n_cache_reuse=0,
fmax_loss=h.fmax_for_loss, device=device, fine_tuning=a.fine_tuning,
base_mels_path=a.input_mels_dir)
validation_loader = DataLoader(validset, num_workers=1, shuffle=False,
sampler=None,
batch_size=1,
pin_memory=True,
drop_last=True)
sw = SummaryWriter(os.path.join(a.checkpoint_path, 'logs'))
# 设置模型为训练模式
generator.train()
mpd.train()
msd.train()
# 开始训练循环
for epoch in range(max(0, last_epoch), a.training_epochs):
if rank == 0:
start = time.time()
print("Epoch: {}".format(epoch+1))
# 如果有多个GPU,就设置分布式数据并行的采样器
if h.num_gpus > 1:
train_sampler.set_epoch(epoch)
# 遍历数据批次
for i, batch in enumerate(train_loader):
if rank == 0:
start_b = time.time()
# 从当前的批次中获取输入数据x,目标输出y,以及梅尔频谱图y_mel
x, y, _, y_mel = batch
# 将所有的数据封装为pytorch的变量Variable对象,并将之移动到指定的设备上
x = torch.autograd.Variable(x.to(device, non_blocking=True))
y = torch.autograd.Variable(y.to(device, non_blocking=True))
y_mel = torch.autograd.Variable(y_mel.to(device, non_blocking=True))
# 调整目标输出的维度,增加了目标输出y的维度,确保y和模型的输出y_hat的维度一致
y = y.unsqueeze(1)
# 生成器生成
y_g_hat = generator(x)
y_g_hat_mel = mel_spectrogram(y_g_hat.squeeze(1), h.n_fft, h.num_mels, h.sampling_rate, h.hop_size, h.win_size,
h.fmin, h.fmax_for_loss)
# 判别器梯度清零
optim_d.zero_grad()
# MPD
# 多周期判别器的损失
y_df_hat_r, y_df_hat_g, _, _ = mpd(y, y_g_hat.detach())
loss_disc_f, losses_disc_f_r, losses_disc_f_g = discriminator_loss(y_df_hat_r, y_df_hat_g)
# MSD
# 多尺度判别器生成的数据
y_ds_hat_r, y_ds_hat_g, _, _ = msd(y, y_g_hat.detach())
loss_disc_s, losses_disc_s_r, losses_disc_s_g = discriminator_loss(y_ds_hat_r, y_ds_hat_g)
# 总的判别器损失
loss_disc_all = loss_disc_s + loss_disc_f
# 反向传播鉴别器的损失
loss_disc_all.backward()
optim_d.step()
# Generator
# 生成器梯度清零
optim_g.zero_grad()
# L1 Mel-Spectrogram Loss
# 生成器的L1损失
loss_mel = F.l1_loss(y_mel, y_g_hat_mel) * 45
# 计算生成器损失,包括mel频谱图的L1损失\特征匹配损失和生成器损失
y_df_hat_r, y_df_hat_g, fmap_f_r, fmap_f_g = mpd(y, y_g_hat)
y_ds_hat_r, y_ds_hat_g, fmap_s_r, fmap_s_g = msd(y, y_g_hat)
loss_fm_f = feature_loss(fmap_f_r, fmap_f_g)
loss_fm_s = feature_loss(fmap_s_r, fmap_s_g)
loss_gen_f, losses_gen_f = generator_loss(y_df_hat_g)
loss_gen_s, losses_gen_s = generator_loss(y_ds_hat_g)
loss_gen_all = loss_gen_s + loss_gen_f + loss_fm_s + loss_fm_f + loss_mel
# 反向传播生成器的损失
loss_gen_all.backward()
# 执行梯度优化
optim_g.step()
# 如果是主进程,进行日志记录 检查点保存和验证
if rank == 0:
# STDOUT logging
# 标准输出日志
if steps % a.stdout_interval == 0:
with torch.no_grad():
mel_error = F.l1_loss(y_mel, y_g_hat_mel).item()
print('Steps : {:d}, Gen Loss Total : {:4.3f}, Mel-Spec. Error : {:4.3f}, s/b : {:4.3f}'.
format(steps, loss_gen_all, mel_error, time.time() - start_b))
# checkpointing
# 检查点保存
if steps % a.checkpoint_interval == 0 and steps != 0:
checkpoint_path = "{}/g_{:08d}".format(a.checkpoint_path, steps)
save_checkpoint(checkpoint_path,
{'generator': (generator.module if h.num_gpus > 1 else generator).state_dict()})
checkpoint_path = "{}/do_{:08d}".format(a.checkpoint_path, steps)
save_checkpoint(checkpoint_path,
{'mpd': (mpd.module if h.num_gpus > 1
else mpd).state_dict(),
'msd': (msd.module if h.num_gpus > 1
else msd).state_dict(),
'optim_g': optim_g.state_dict(), 'optim_d': optim_d.state_dict(), 'steps': steps,
'epoch': epoch})
# Tensorboard summary logging
# tensorboard摘要日志
if steps % a.summary_interval == 0:
sw.add_scalar("training/gen_loss_total", loss_gen_all, steps)
sw.add_scalar("training/mel_spec_error", mel_error, steps)
# Validation
# 验证
if steps % a.validation_interval == 0: # and steps != 0:
generator.eval()
torch.cuda.empty_cache()
val_err_tot = 0
with torch.no_grad():
for j, batch in enumerate(validation_loader):
x, y, _, y_mel = batch
y_g_hat = generator(x.to(device))
y_mel = torch.autograd.Variable(y_mel.to(device, non_blocking=True))
y_g_hat_mel = mel_spectrogram(y_g_hat.squeeze(1), h.n_fft, h.num_mels, h.sampling_rate,
h.hop_size, h.win_size,
h.fmin, h.fmax_for_loss)
val_err_tot += F.l1_loss(y_mel, y_g_hat_mel).item()
# 保存音频和频谱图
if j <= 4:
if steps == 0:
sw.add_audio('gt/y_{}'.format(j), y[0], steps, h.sampling_rate)
sw.add_figure('gt/y_spec_{}'.format(j), plot_spectrogram(x[0]), steps)
sw.add_audio('generated/y_hat_{}'.format(j), y_g_hat[0], steps, h.sampling_rate)
y_hat_spec = mel_spectrogram(y_g_hat.squeeze(1), h.n_fft, h.num_mels,
h.sampling_rate, h.hop_size, h.win_size,
h.fmin, h.fmax)
sw.add_figure('generated/y_hat_spec_{}'.format(j),
plot_spectrogram(y_hat_spec.squeeze(0).cpu().numpy()), steps)
val_err = val_err_tot / (j+1)
sw.add_scalar("validation/mel_spec_error", val_err, steps)
generator.train()
steps += 1
# 更新学习率调度器
scheduler_g.step()
scheduler_d.step()
if rank == 0:
print('Time taken for epoch {} is {} sec\n'.format(epoch + 1, int(time.time() - start)))
def main():
print('Initializing Training Process..')
parser = argparse.ArgumentParser()
# 加载并解析参数
# group_name表示分组名称
parser.add_argument('--group_name', default=None)
# input_wavs_dir表示输入的音频文件夹
parser.add_argument('--input_wavs_dir', default='LJSpeech-1.1/wavs')
# input_mels_dir表示输入的mel谱文件夹
parser.add_argument('--input_mels_dir', default='ft_dataset')
# input_training_file表示输入的训练文件
parser.add_argument('--input_training_file', default='LJSpeech-1.1/training.txt')
# input_validation_file表示输入的验证文件
parser.add_argument('--input_validation_file', default='LJSpeech-1.1/validation.txt')
# checkpoint_path表示检查点路径
parser.add_argument('--checkpoint_path', default='cp_hifigan')
# config表示配置文件
parser.add_argument('--config', default='')
# training_epoches训练的总周期数。默认值为3100。
parser.add_argument('--training_epochs', default=3100, type=int)
# stdout_interval: 标准输出日志的间隔步数。默认值为5。
parser.add_argument('--stdout_interval', default=5, type=int)
# checkpoint_interval: 检查点保存的间隔步数。默认值为5000。
parser.add_argument('--checkpoint_interval', default=5000, type=int)
# summary_interval: TensorBoard摘要记录的间隔步数。默认值为100。
parser.add_argument('--summary_interval', default=100, type=int)
# validation_interval: 验证的间隔步数。默认值为1000。
parser.add_argument('--validation_interval', default=1000, type=int)
# fine_tuning: 是否进行微调。默认值为False。
parser.add_argument('--fine_tuning', default=False, type=bool)
a = parser.parse_args()
# 读取配置文件
with open(a.config) as f:
data = f.read()
# 解析json文件
json_config = json.loads(data)
# 将json文件转换为字典
h = AttrDict(json_config)
# 根据配置文件创建对应文件
build_env(a.config, 'config.json', a.checkpoint_path)
# 设置随机种子,确保训练的可重复性
torch.manual_seed(h.seed)
# 检测GPU,如果多个GPU就同时训练
if torch.cuda.is_available():
torch.cuda.manual_seed(h.seed)
h.num_gpus = torch.cuda.device_count()
h.batch_size = int(h.batch_size / h.num_gpus)
print('Batch size per GPU :', h.batch_size)
else:
pass
if h.num_gpus > 1:
# 多个GPU的训练方式
mp.spawn(train, nprocs=h.num_gpus, args=(a, h,))
else:
# 一个GPU的训练方式
train(0, a, h)
if __name__ == '__main__':
main()
总结
- 我觉得在训练过程中关于生成器和鉴定器的前向传播过程中的链接,十分重要,虽然很多东西都是分开算的,但是最终都会同意进行误差反向传播,并且梯度优化也是针对两个分别声明的变量.需要仔细留一下.
- 两次前向传播的计算图不一样,我觉得我现在仅仅是懂了代码框架,并没有懂代码背后的计算图是什么样的.如果有计算图,我应该会更好说明这两次前向传播的过程.
- 然后就是多个GPU同时训练的过程,需要好好学习一下,目前,大部分都是使用单个GPU进行训练学习,对于多个GPU的训练考虑到主线程和其余多个线程的协调关系,对然他已经给你封装好了,你还是需要学习一下,理解才行.
- 这个代码太长了,严重拉慢了我的进度,所以就挑重点阅读学习了一下,下次有空可以整体学习一下这个代码.
引用
- chatGPT-plus
- HiFi-GAN demo
- HiFi-GAN: Generative Adversarial Networks for Efficient and High Fidelity Speech Synthesis
到了这里,关于论文代码学习—HiFi-GAN(4)——模型训练函数train文件具体解析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!