准备:
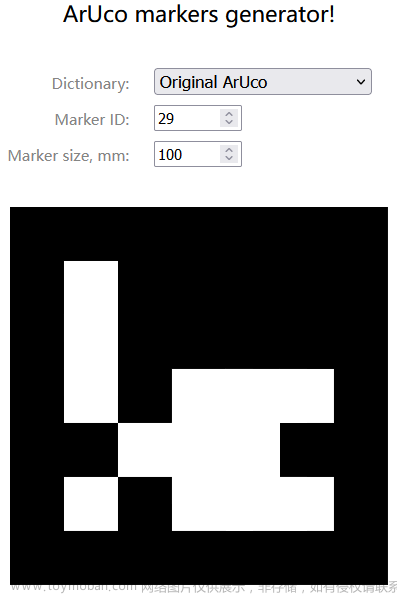
+ aruco标签6*6
+ 相机标定文件(参考我的上篇文章)
+ 摄像头文章来源:https://www.toymoban.com/news/detail-629281.html
+ 摄像头要一开始对准aruco标签才开始运行文章来源地址https://www.toymoban.com/news/detail-629281.html
import numpy as np
import time
import cv2
import cv2.aruco as aruco
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import yaml
import warnings
warnings.filterwarnings("ignore")
cv2.namedWindow('imgage', cv2.WINDOW_FREERATIO)
###加载标定参数yaml
###加载文件路径###
file_path = ("./4k标定参数.yaml")
# file_path = ("/home/pi/PycharmProjects/pythonProject/opencv_test/变焦相机标定参数.yaml")
###加载文件路径###
with open(file_path, "r") as file:
parameter = yaml.load(file.read(), Loader=yaml.Loader)
mtx = parameter['camera_matrix']
dist = parameter['dist_coeff']
camera_u = parameter['camera_u']
camera_v = parameter['camera_v']
mtx = np.array(mtx)
dist = np.array(dist)
#打开摄像头
ID = 0
while (1):
cap = cv2.VideoCapture(ID)
ret, frame = cap.read()
if ret == False:
ID += 1
elif ID >= 10:
break
else:
#print(ID)
break
font = cv2.FONT_HERSHEY_SIMPLEX # font for displaying text (below)
flag = cap.isOpened()
cap.set(3, 3840)
cap.set(4, 2160)
cap.set(6, cv2.VideoWriter.fourcc(*'MJPG'))
plt.ion()
#画三维图
fig = plt.figure()
ax = fig.gca(projection="3d")
#print(mtx, dist, camera_u, camera_v)
while 1:
ret, img = cap.read()
frame = img
h1, w1 = frame.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (h1, w1), 0, (h1, w1))
dst1 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
x, y, w1, h1 = roi
dst1 = dst1[y:y + h1, x:x + w1]
frame1 = dst1
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_1000)
parameters = aruco.DetectorParameters_create()
dst1 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
#保存图像
# cv2.imwrite("./frame.jpg", dst1)
'''
detectMarkers(...)
detectMarkers(image, dictionary[, corners[, ids[, parameters[, rejectedI
mgPoints]]]]) -> corners, ids, rejectedImgPoints
'''
# 使用aruco.detectMarkers()函数可以检测到marker,返回ID和标志板的4个角点坐标
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray, aruco_dict, parameters=parameters)
#print(corners)
#print(ids)
#f是板卡的长度
f=0.03
# 如果找不打id
if ids is not None:
#计算r和t
rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, f, mtx, dist)
# 估计每个标记的姿态并返回值rvet和tvec ---不同
# from camera coeficcients
(rvec - tvec).any() # get rid of that nasty numpy value array error
#print(tvec)
# aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #绘制轴
# aruco.drawDetectedMarkers(frame, corners) #在标记周围画一个正方形
for i in range(rvec.shape[0]):
cv2.drawFrameAxes(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.05)
aruco.drawDetectedMarkers(frame, corners)
###### DRAW ID #####
cv2.putText(frame, "Id: " + str(ids), (0, 64), font, 1, (0, 255, 0), 2, cv2.LINE_AA)
# plt.imshow(frame, aspect='auto')
cv2.imshow("imgage",frame)
#计算两两标记间的距离并输出
for i in range(tvec.shape[0]):
j = i - 1
while j >= 0:
print('point:' + str(ids[i]) + str(ids[j]), ',dist:' + str(np.linalg.norm(tvec[i][0] - tvec[j][0])))
j = j - 1
#计算各个坐标到相机的距离
for i in range(tvec.shape[0]):
print('point:' + str(ids[i]) + ',dist:' + str(np.linalg.norm(tvec[i][0] - [0, 0, 0])))
h1, w1 = frame.shape[:2]
#每个标记自己的世界坐标系坐标
#原点和四个角
joint_world = [[0, 0, 0],
[f / 2, f / 2, 0],
[-f / 2, f / 2, 0],
[-f / 2, -f / 2, 0],
[f / 2, -f / 2, 0]]
joint_cam_ori = []
joint_cam_1 = []
joint_cam_2 = []
joint_cam_3 = []
joint_cam_4 = []
#循环将各个标记的世界坐标系转为相机坐标系
# 如果找不打id
if ids is not None:
for i in range(rvec.shape[0]):
R = np.zeros((3, 3), dtype=np.float64)
cv2.Rodrigues(rvec[i, :, :], R)
T = tvec[i][0]
# print("R:",R)
# print("T:",T)
"""
世界坐标系 -> 相机坐标系: R * (pt - T):
joint_cam = np.dot(R, (joint_world - T).T).T
:return:
"""
joint_world = np.asarray(joint_world)
joint_num = len(joint_world)
# 世界坐标系 -> 相机坐标系
# [R|t] world coords -> camera coords
# joint_cam = np.zeros((joint_num, 3)) # joint camera
# for i in range(joint_num): # joint i
# joint_cam[i] = np.dot(R, joint_world[i] - T) # R * (pt - T)
# .T is 转置, T is translation mat
joint_cam = np.dot(R, (joint_world).T).T + T
joint_cam_ori.append(joint_cam[0])
joint_cam_1.append(joint_cam[1])
joint_cam_2.append(joint_cam[2])
joint_cam_3.append(joint_cam[3])
joint_cam_4.append(joint_cam[4])
xs = [0]
ys = [0]
zs = [0]
for i in range(len(joint_cam_ori)):
xs.append(joint_cam_ori[i][0])
ys.append(joint_cam_ori[i][1] )
zs.append(joint_cam_ori[i][2])
for i in range(len(joint_cam_1)):
xs.append(joint_cam_1[i][0])
ys.append(joint_cam_1[i][1])
zs.append(joint_cam_1[i][2])
# '''
for i in range(len(joint_cam_2)):
xs.append(joint_cam_2[i][0])
ys.append(joint_cam_2[i][1] )
zs.append(joint_cam_2[i][2])
for i in range(len(joint_cam_3)):
xs.append(joint_cam_3[i][0])
ys.append(joint_cam_3[i][1] )
zs.append(joint_cam_3[i][2])
for i in range(len(joint_cam_4)):
xs.append(joint_cam_4[i][0])
ys.append(joint_cam_4[i][1] )
zs.append(joint_cam_4[i][2])
# '''
#画各个标记平面
ax.scatter(xs, ys, zs, zdir="z", c="#00DDAA", marker="o", s=50)
ax.set(xlabel="X", ylabel="Y", zlabel="Z")
for i in range(len(ids)):
j = 1 + i
k = len(ids)
x, y, z = np.array([[xs[j + k], ys[j + k], zs[j + k]], [xs[j + 2 * k], ys[j + 2 * k], zs[j + 2 * k]],
[xs[j + 3 * k], ys[j + 3 * k], zs[j + 3 * k]],
[xs[j + 4 * k], ys[j + 4 * k], zs[j + 4 * k]], [xs[j + k], ys[j + k], zs[j + k]],
[xs[j + 2 * k], ys[j + 2 * k], zs[j + 2 * k]],
[xs[j + 3 * k], ys[j + 3 * k], zs[j + 3 * k]],
[xs[j + 4 * k], ys[j + 4 * k], zs[j + 4 * k]]]).T
ax.plot_trisurf(x, y, z)
#画相机原点三轴
ax.plot([0, f], [0, 0], [0, 0], label=' ', color='blue')
ax.plot([0, 0], [0, f], [0, 0], label=' ', color='green')
ax.plot([0, 0], [0, 0], [0, f], label=' ', color='red')
plt.gca().set_box_aspect((3, 2, 12)) # 当x、y、z轴范围之比为3:5:2时。
plt.pause(0.1)
plt.cla()
# plt.ioff() # 关闭画图窗口Z
else:
##### DRAW "NO IDS" #####
cv2.putText(frame, "No Ids", (0, 64), font, 1, (0, 255, 0), 2, cv2.LINE_AA)
plt.clf() # 清除之前画的图
到了这里,关于Aruco标签定位、测距、三维位置估算 opencv应用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!