要使用FPGA与STM32实现串口通信,以下是一般的步骤:
-
配置STM32的串口模块:使用STM32的库函数或者寄存器配置,选择一个可用的串口模块(例如USART1、USART2等)并设置相应的波特率、数据位、停止位等参数。确保STM32串口的引脚与FPGA连接正确。
-
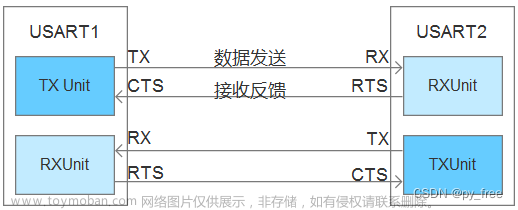
配置FPGA与STM32之间的通信接口:确定FPGA与STM32之间的通信接口,通常使用串口通信需要至少两个信号线:一个用于发送数据(TX),一个用于接收数据(RX)。确保FPGA的引脚与STM32的串口引脚相连。
-
在FPGA中实现串口通信接口:使用HDL(硬件描述语言,如Verilog或VHDL)编写FPGA逻辑,实现串口通信接口。这包括发送和接收数据的逻辑,以及与STM32的串口模块进行数据交换的逻辑。
-
在STM32中编写串口通信代码:使用STM32的开发环境(如Keil或STM32CubeIDE)编写串口通信的代码。这包括配置STM32串口模块、发送和接收数据的代码。
-
在FPGA中进行数据的发送和接收:通过FPGA的串口通信接口将数据发送到STM32,或从STM32接收数据。确保数据的格式和协议在FPGA和STM32之间匹配。
-
在STM32中进行数据的发送和接收:使用STM32的串口通信代码,接收来自FPGA的数据或将数据发送到FPGA。确保STM32的串口配置与FPGA的串口配置匹配。
-
测试与调试:使用示波器或串口调试工具监视串口数据的发送和接收。检查数据的准确性和完整性,并进行必要的调试和修复。
需要注意的是,FPGA和STM32之间的串口通信需要确保数据格式、波特率等参数的一致性。另外,还需要关注引脚连接和信号电平的匹配,以确保正确的数据传输。具体的实现细节和代码编写可能因具体的FPGA型号和STM32型号而有所不同,你可以参考相关的开发文档和例程来帮助你完成串口通信的实现。
以下为本人做无人船时使用的FPGA与stm32串口通信过程。
首先为FPGA输出PWM波控制两个电机的过程:
//FPGA 控制舵机程序(verilog)
module pwm_gen(
input nreset,
input clk,
input en,//1
input [31:0] period,
input [31:0] h_time,
output reg pwm
);
reg [31:0] CNT;
always @ (posedge clk)
begin
if(nreset)
CNT <= 0;
else if(CNT >= period - 1 )
CNT <= 0;
else
CNT <= CNT + 1;
end
always @ (posedge clk)
begin
if(nreset)
pwm <= 0;
else //nreset = 1
begin
if(en == 0)
pwm <= 0;
else //en = 1
begin
if(CNT <= h_time - 1)
pwm <= 1;
else
pwm <= 0;
end
end
end
endmodule
//125M 20M
//例化可控制三个舵机
module PWM1(clk,nreset,uart_rxd,pwm3,pwm4);
input clk;
input nreset;
input uart_rxd;
output pwm3;//[2:0]
output pwm4;//[2:0]
//reg pwm2;
wire [31:0]left0;
wire [31:0]right0;
wire clkp0;
wire uart_rx_done;
wire uart_rx_data;
wire locked;
pwm_gen a1(
.nreset(nreset),
.clk(clk),
.en(1),
.period(2500000),
.h_time(left0),
.pwm(pwm3)
);
pwm_gen a2(
.nreset(nreset),
.clk(clk),
.en(1),
.period(2500000),
.h_time(right0),
.pwm(pwm4)
);
// pwm_gen a2(nreset,clk,1,2500000,right0,pwm4); //125000 250000
// pwm_gen a2(clk,nreset,1,2500000,1500_000,pwm3[1]);
// pwm_gen a3(clk,nreset,1,2500000,2000_000,pwm3[2]);
//例化被测试的接收模块
//uart_rx #(
// .BPS (9600), //波特率9600
// .SYS_CLK_FRE (50_000_000)//时钟频率50M
//)
uart_rx u_uart_rx (
.sys_clk (clkp0),
.sys_rst_n (sys_rst_n),
.uart_rxd (uart_rxd),
.uart_rx_done (uart_rx_done),
.uart_rx_data (uart_rx_data) ,
.left(left0),
.right(right0)
);
clk_wiz_0 uu0
(
// Clock out ports
.clk_out1(clkp0),
.reset(nreset),
.locked(),
// Clock in ports
.clk_in1(clk)
);
// 1000 2000
//1000_000 1500_000 2000_000
endmodule其次建立FPGA的uart模块:
//`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2023/06/16 18:08:02
// Design Name:
// Module Name: uart
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module uart_rx(
input sys_clk, //50M系统时钟
input sys_rst_n, //系统复位
input uart_rxd, //接收数据线
output reg uart_rx_done, //数据接收完成标志
output reg [7:0]uart_rx_data, //接收到的数据
output reg [31:0] left, //数据接收完成标志
output reg [31:0] right //数据接收完成标志
);
//常量化波特率,可更改
parameter BPS=115200; //波特率9600bps,可更改
parameter SYS_CLK_FRE=50_000_000; //50M系统时钟
localparam BPS_CNT=SYS_CLK_FRE/BPS; //传输一位数据所需要的时钟个数
reg uart_rx_d0; //寄存1拍
reg uart_rx_d1; //寄存2拍
reg [15:0] clk_cnt; //时钟计数器
reg [3:0] rx_cnt; //接收计数器
reg rx_flag; //接收标志位
reg [7:0] uart_rx_data_reg; //数据寄存
reg [3:0] cnt_dj;//电机PWM值计数
reg [31:0] count0 = 10'd100;
wire neg_uart_rx_data; //数据的下降沿
reg [31:0] lefft;
reg [31:0] lefft1;
assign neg_uart_rx_data=uart_rx_d1 & (~uart_rx_d0); //捕获数据线的下降沿,用来标志数据传输开始
//将数据线打两拍,作用1:同步不同时钟域信号,防止亚稳态;作用2:用以捕获下降沿
always@(posedge sys_clk or negedge sys_rst_n)begin
if(sys_rst_n)begin
uart_rx_d0<=1'b0;
uart_rx_d1<=1'b0;
end
else begin
uart_rx_d0<=uart_rxd;
uart_rx_d1<=uart_rx_d0;
end
end
//捕获到数据下降沿(起始位0)后,拉高传输开始标志位,并在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
always@(posedge sys_clk or negedge sys_rst_n)begin
if(sys_rst_n)
rx_flag<=1'b0;
else begin
if(neg_uart_rx_data)
rx_flag<=1'b1;
else if((rx_cnt==4'd9)&&(clk_cnt==BPS_CNT/2))//在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
rx_flag<=1'b0;
else
rx_flag<=rx_flag;
end
end
//时钟每计数一个BPS_CNT(传输一位数据所需要的时钟个数),即将数据计数器加1,并清零时钟计数器
always@(posedge sys_clk or negedge sys_rst_n)begin
if(sys_rst_n)begin
rx_cnt<=4'd0;
clk_cnt<=16'd0;
end
else if(rx_flag)begin
if(clk_cnt<BPS_CNT-1'b1)begin
clk_cnt<=clk_cnt+1'b1;
rx_cnt<=rx_cnt;
end
else begin
clk_cnt<=16'd0;
rx_cnt<=rx_cnt+1'b1;
end
end
else begin
rx_cnt<=4'd0;
clk_cnt<=16'd0;
end
end
//在每个数据的传输过程正中(数据比较稳定)将数据线上的数据赋值给数据寄存器
always@(posedge sys_clk or negedge sys_rst_n)begin
if(sys_rst_n)
uart_rx_data_reg<=8'd0;
else if(rx_flag)
if(clk_cnt==BPS_CNT/2) begin
case(rx_cnt)
4'd1:uart_rx_data_reg[0]<=uart_rxd;
4'd2:uart_rx_data_reg[1]<=uart_rxd;
4'd3:uart_rx_data_reg[2]<=uart_rxd;
4'd4:uart_rx_data_reg[3]<=uart_rxd;
4'd5:uart_rx_data_reg[4]<=uart_rxd;
4'd6:uart_rx_data_reg[5]<=uart_rxd;
4'd7:uart_rx_data_reg[6]<=uart_rxd;
4'd8:uart_rx_data_reg[7]<=uart_rxd;
default:;
endcase
end
else
uart_rx_data_reg<=uart_rx_data_reg;
else
uart_rx_data_reg<=8'd0;
end
//当数据传输到终止位时,拉高传输完成标志位,并将数据输出
always@(posedge sys_clk or negedge sys_rst_n)begin
if(sys_rst_n)
begin
uart_rx_done=1'b0;
left=32'd125000;
lefft=32'd0;
lefft1=32'd0;
right=32'd0;
cnt_dj=4'd0;
uart_rx_data=8'd0;
end
else if(rx_cnt==4'd9)
begin//接收完判断
uart_rx_done=1'b1;
uart_rx_data=uart_rx_data_reg;
// rx_cnt<=4'd0;
if(uart_rx_data==16'hFF &&cnt_dj==4'd0)
begin
cnt_dj=4'd1;
uart_rx_data=8'd0;
left=32'd0;
right=32'd0;
end
else if(uart_rx_data!=16'hFF &&cnt_dj==4'd1)
begin
left=uart_rx_data*count0;
cnt_dj=4'd2;
end
else if(uart_rx_data==16'hFE &&cnt_dj==4'd2)
begin
cnt_dj=4'd3;
uart_rx_data=8'd0;
end
else if(uart_rx_data!=16'hFE &&cnt_dj==4'd3)
begin
left=left+uart_rx_data;
left=left*10'd125;
cnt_dj=4'd4;
end
else if(uart_rx_data==16'hFD &&cnt_dj==4'd4)
begin
cnt_dj=4'd5;
uart_rx_data=8'd0;
end
else if(uart_rx_data!=16'hFD &&cnt_dj==4'd5)
begin
right=uart_rx_data*count0;
cnt_dj=4'd6;
end
else if(uart_rx_data==16'hFC &&cnt_dj==4'd6)
begin
cnt_dj=4'd7;
uart_rx_data=8'd0;
end
else if(uart_rx_data!=16'hFC &&cnt_dj==4'd7)
begin
right=right+uart_rx_data;
right=right*10'd125;
cnt_dj=4'd0;
end
end
else
begin
uart_rx_done<=1'b0;
uart_rx_data=8'd0;
end
end
endmodule
// if(uart_rx_data==16'hFF &&cnt_dj==4'd0)
// begin
// cnt_dj=4'd1;
// uart_rx_data=8'd0;
// left=32'd0;
// right=32'd0;
// end
// else if(uart_rx_data!=16'hFF)
// begin
// if(cnt_dj==4'd4)
// begin
// right=right+uart_rx_data;
// cnt_dj=4'd0;
// end
// if(cnt_dj==4'd3)
// begin
// right=uart_rx_data*100;
// cnt_dj=4'd4;
// end
// if(cnt_dj==4'd2)
// begin
// left=left+uart_rx_data;
// lefft1=left;
// cnt_dj=4'd3;
// end
// if(cnt_dj==4'd1)
// begin
// left=uart_rx_data*count0;
// lefft<=left;
// cnt_dj=4'd2;
// end
// end
由于两模块间需要进行分频处理,将125MHZ分成50MHZ,我们采用vivado自带的IP核进行分频处理,具体步骤如下图所示:

 仿真模块如下所示:
仿真模块如下所示:
`timescale 1ns/1ps
//module tb;
// reg sys_clk;
// reg sys_rst_n;
// wire PWMA_H, PWMA_L, PWMB_H, PWMB_L, PWMC_H, PWMC_L;
// // Reset generation
// initial begin
// sys_rst_n = 0;
// sys_clk=0;
// #10;
// sys_rst_n = 1;
// #100;
// $finish; // End simulation after some time
// end
// // Clock generation
// always #5 sys_clk = ~sys_clk;
// // Testbench logic
// reg clk_counter = 0;
// // Instantiate the PWM module
//PWM1 a4(sys_clk,sys_rst_n,PWMA_H);
// always @(posedge sys_clk) begin
// if (sys_rst_n) begin
// clk_counter <= clk_counter + 1;
// // Read PWM output signals
// $display("Time: %t, PWMA_H: %b, PWMA_L: %b, PWMB_H: %b, PWMB_L: %b, PWMC_H: %b, PWMC_L: %b",
// $time, PWMA_H, PWMA_L, PWMB_H, PWMB_L, PWMC_H, PWMC_L);
// // Add your testbench assertions or other test logic here
// // Stop simulation after a certain number of clock cycles
// if (clk_counter == 1000)
// $finish;
// end
// end
//endmodule
//模块、接口定义
module uart_rx_tb();
reg sys_clk;
reg sys_rst_n;
reg uart_rxd;
wire locked;
wire clkp0;
wire PWMA_H;
wire uart_rx_done;
wire uart_rx_data;
wire pwm3;
wire pwm4;
wire [31:0] left0;
wire [31:0] right0;
pwm_gen a1(sys_rst_n,sys_clk,1,2000000,left0,pwm3);
pwm_gen a2(sys_rst_n,sys_clk,1,2000000,right0,pwm4);
//例化被测试的接收模块
uart_rx #(
.BPS (9600), //波特率9600
.SYS_CLK_FRE (50_000_000)//时钟频率50M
)
u_uart_rx(
.sys_clk (clkp0),
.sys_rst_n (sys_rst_n),
.uart_rxd (uart_rxd),
.uart_rx_done (uart_rx_done),
.uart_rx_data (uart_rx_data),
.left(left0),
.right(right0)
);
clk_wiz_1 uu1
(
// Clock out ports
.clk_out1(clkp0),
.reset(sys_rst_n),
.locked(locked),
// Clock in ports
.clk_in1(sys_clk)
);
// PWM1 a4(sys_clk,sys_rst_n,PWMA_H);
localparam CNT=50_000_000/9600*20; //计算出传输每个时钟所需要的时间
initial begin //传输8位数据 8'b01010101
//初始时刻定义
sys_clk <=1'b0;
sys_rst_n<=1'b0;
uart_rxd<=1'b1;
#20 //系统开始工作
sys_rst_n<=1'b1;
#20 //系统开始工作
sys_rst_n<=1'b0;
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b1;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b0; //传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b0; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
//FF
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b1;//传输最低位,第1位
#CNT
uart_rxd<=1'b1;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b1; //传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b1;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b1; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
// 左右电机的数
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b0;//传输最低位,第1位
#CNT
uart_rxd<=1'b1;//传输第2位
#CNT
uart_rxd<=1'b0;//传输第3位
#CNT
uart_rxd<=1'b1; //传输第4位
#CNT
uart_rxd<=1'b0;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b0;//传输第7位
#CNT
uart_rxd<=1'b0; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
//FE
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b0;//传输最低位,第1位
#CNT
uart_rxd<=1'b1;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b1; //传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b1;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b1; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
#(CNT) //00
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b0;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b0;//传输第3位
#CNT
uart_rxd<=1'b0; //传输第4位
#CNT
uart_rxd<=1'b0;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b0;//传输第7位
#CNT
uart_rxd<=1'b0; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
//FD
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b1;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b1; //传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b1;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b1; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
//右
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b0;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b0; //传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b0;//传输第7位
#CNT
uart_rxd<=1'b0; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
//FC
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b0;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b1; //传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b1;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b1; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
//00
#(CNT/2)
uart_rxd<=1'b1;//开始传输起始位
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b0;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b0;//传输第3位
#CNT
uart_rxd<=1'b0; //传输第4位
#CNT
uart_rxd<=1'b0;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b0;//传输第7位
#CNT
uart_rxd<=1'b0; //传输最高位,第8位
#CNT
uart_rxd<=1'b1; //传输终止位
end
always begin
#5 sys_clk=~sys_clk; //时钟20ns,100M
end
// always begin
// #10 sys_clk=~sys_clk; //时钟20ns,50M
//end
endmodule
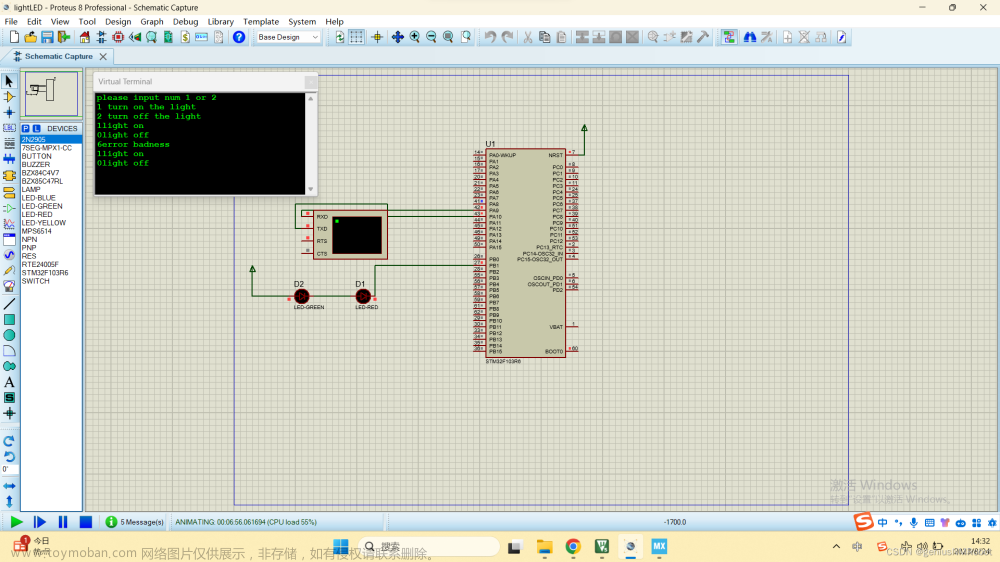
以上便实现了FPGA的接收功能,此时FPGA可以接收FF--FE--FD--FC--的信号,其中--代表16进制数,FF后的16进制数乘100加FE后面的16进制数及为左电机的电机值,同理,FD后面的乘100加FC后面的为右电机的电机值,我们只需要在单片机上实现发送FF--FE--FD--FC--的信号的功能即可完成全部过程。
仿真图如下所示:
 文章来源:https://www.toymoban.com/news/detail-630458.html
文章来源:https://www.toymoban.com/news/detail-630458.html
从仿真可以看出实验非常成功,对应项目的无人船而言也十分成功。欢迎大家积极讨论留言!!!文章来源地址https://www.toymoban.com/news/detail-630458.html
到了这里,关于FPGA与stm32实现串口通信(stm32发,FPGA收)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!