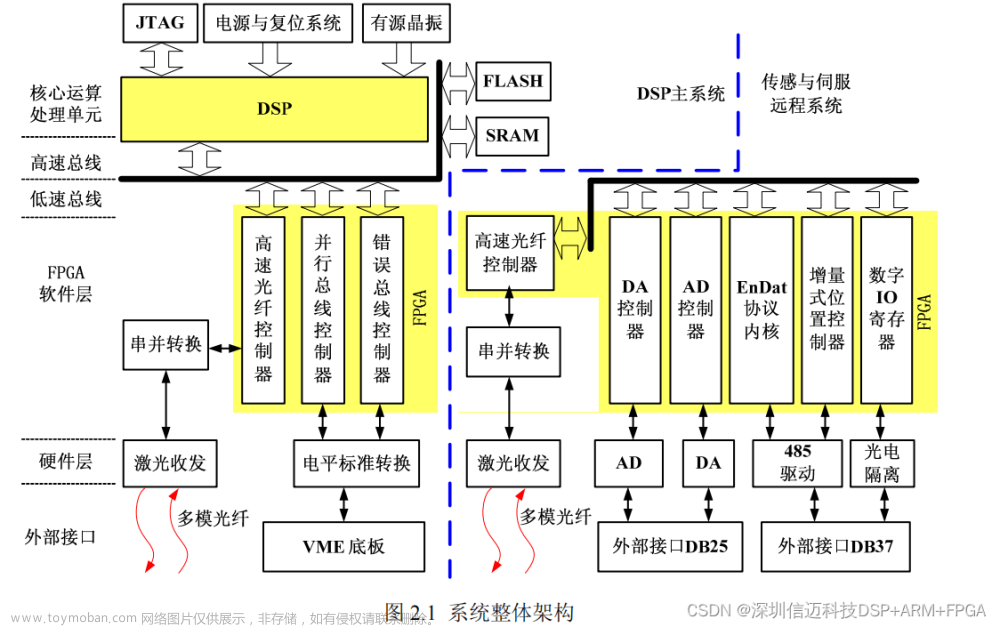
伺服系统故障拓扑图

Er.941 变更参数需重新上电生效
产生机理:伺服驱动器的功能码属性“生效时间”为“再次通电”时,该功能码参数值变更后,驱动器提醒用户需要重新上电。
| 原因 |
确认方法 |
处理措施 |
| 变更了再次通电后更改生效的功能码 |
确认是否更改了“生效时间”为“重新上电”的功能码 |
重新上电 |
Er.950 正极限报警
产生机理:当碰到正极限信号时会报警Er.950。

解决措施:①执行复位后反向点动离开正极限信号开关
②手动移动轴离开正极限开关
Er.120 产品匹配故障
产生机理:伺服系统中,伺服驱动器的功率设置,驱动功率设置小于所带电机的功率
产生原因:①小驱动带大电机
②驱动器功率(H01-02)设置错误
解决措施:①伺服驱动器重新断电上电
②设置正确的驱动器编号H01-02文章来源:https://www.toymoban.com/news/detail-632269.html
Er.122 绝对值模式产品匹配故障
产生机理:把增量电机设置成了绝对值电机模式<文章来源地址https://www.toymoban.com/news/detail-632269.html
到了这里,关于汇川伺服常见故障处理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!