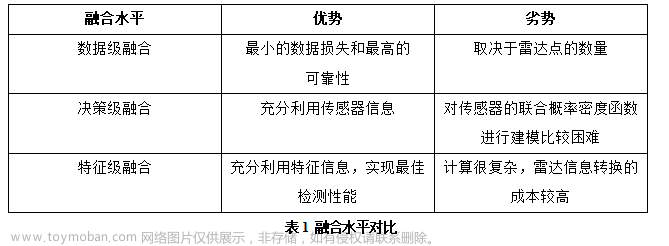
相机靶面大小
CCD/CMOS图像传感器尺寸(sensor format)1/2’‘、1/3’‘、1/4’'实际是多大
1英寸——靶面尺寸为宽12.7mm*高9.6mm,对角线16mm。
2/3英寸——靶面尺寸为宽8.8mm*高6.6mm,对角线11mm。
1/2英寸——靶面尺寸为宽6.4mm*高4.8mm,对角线8mm。
1/3英寸——靶面尺寸为宽4.8mm*高3.6mm,对角线6mm。
1/4英寸——靶面尺寸为宽3.2mm*高2.4mm,对角线4mm。
单位是英寸,1英寸=2.54厘米。
1/2’'大小指的是对角线长1/2英寸,而不是边长。
CCD尺寸一般用英寸来表示,1/2就是二分之一英寸,是对角线尺寸。靶面尺寸就是CCD尺寸,数码传感器CCD的尺寸,一英寸换算成毫米是16mm,而不是通常的25.4mm, 这里沿用了早起录像机真空管的外径尺寸1"(25.4mm),但除去玻璃管厚度,成像区实际只有16mm,即CCD规格中的1”=16mm。
一般长宽比为4:3,1/2英寸对角线就是8mm,按4:3的比率,长和宽就是6.4X4.8。数码相机的传感器也一样可以这样换算。1/2.5“ CCD长5.12mm宽3.84mm,对角线长度6.4mm。为什么数码相机CCD尺寸单位“英寸”不是常规意义上的1英寸=25.4mm。大多数小尺寸CCD长宽比都是4:3。
市面上的消费级数码相机主要有2/3英寸、1/1.8英寸、1/2.3英寸、1/2.5英寸、1/2.7英寸、1/3.2英寸。CCD/CMOS尺寸越大,感光面积越大,成像效果越好。

光圈值
光圈值,是镜头的焦距除以镜头通光直径得出的相对值(相对孔径的倒数)。
例如针对50mm的标准镜头而言,最大的通光直径为29.5mm,其最大光圈的计算值为50mm÷29.5mm=F1.7,这样就能够理解同一变焦镜头在不同的焦距下,虽然最大的通光直径相同,但是换算之后其最大光圈是不同的。F值越大,光圈越小,反之,F值越小,光圈越大。
表达光圈大小我们是用F值。
光圈F值 = 镜头的焦距/镜头口径的直径
从以上的公式可知要达到相同的光圈F值,长焦距镜头的口径要比短焦距镜头的口径大。当光圈物理孔径不变时,镜头中心与感光器件距离愈远,F数愈大,反之,镜头中心与感光器件距离愈近,通过光孔到达感光器件的光密度愈高,F数就愈小。文章来源:https://www.toymoban.com/news/detail-632799.html
完整的光圈值系列如下: F1, F1.4, F2, F2.8, F4, F5.6, F8, F11, F16, F22, F32, F44, F64。文章来源地址https://www.toymoban.com/news/detail-632799.html
到了这里,关于相机传感器格式与镜头光圈参数的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!