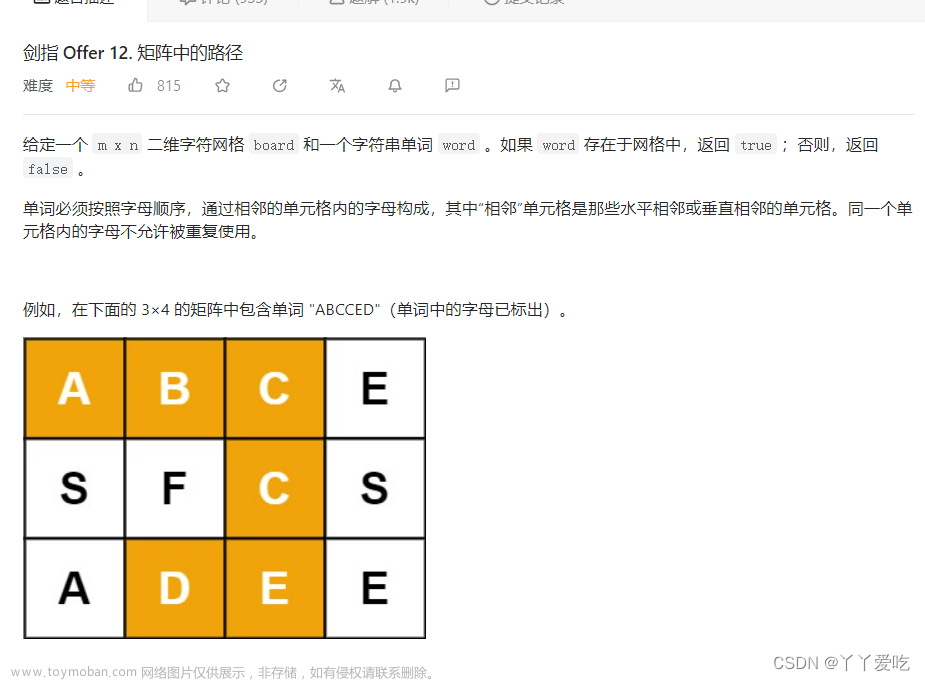
地上有一个m行n列的方格,从坐标 [0,0] 到坐标 [m-1,n-1] 。一个机器人从坐标 [0, 0] 的格子开始移动,它每次可以向左、右、上、下移动一格(不能移动到方格外),也不能进入行坐标和列坐标的数位之和大于k的格子。例如,当k为18时,机器人能够进入方格 [35, 37] ,因为3+5+3+7=18。但它不能进入方格 [35, 38],因为3+5+3+8=19。请问该机器人能够到达多少个格子?
示例 1:
输入:m = 2, n = 3, k = 1 输出:3
示例 2:
输入:m = 3, n = 1, k = 0 输出:1
提示:文章来源:https://www.toymoban.com/news/detail-632810.html
1 <= n,m <= 1000 <= k <= 20
class Solution {
public int movingCount(int m, int n, int k) {
boolean[][] visited = new boolean[m][n];
return dfs(0, 0, m, n, k, visited);
}
private int dfs(int i, int j, int m, int n, int k, boolean visited[][]) {
if (i < 0 || i >= m || j < 0 || j >= n || (i/10 + i%10 + j/10 + j%10) > k || visited[i][j]) {
return 0;
}
visited[i][j] = true;
return 1+ dfs(i + 1, j, m, n, k, visited) + dfs(i - 1, j, m, n, k, visited) +
dfs(i, j + 1, m, n, k, visited) + dfs(i, j - 1, m, n, k, visited);
}
}本题解使用到了递归,也就是递归处理机器人在上,下,左,右的行进,如果不符合条件则返回0,如果符合条件则返回1+在此格子上的又一上,下,左,右的选择。文章来源地址https://www.toymoban.com/news/detail-632810.html
到了这里,关于剑指 Offer 13. 机器人的运动范围的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!