9 USART串口
注:笔记主要参考B站 江科大自化协 教学视频“STM32入门教程-2023持续更新中”。
注:工程及代码文件放在了本人的Github仓库。
9.1 串口通信协议
从本节开始,将逐一学习STM32的通信接口。首先介绍以下stm32都集成了什么通信外设。
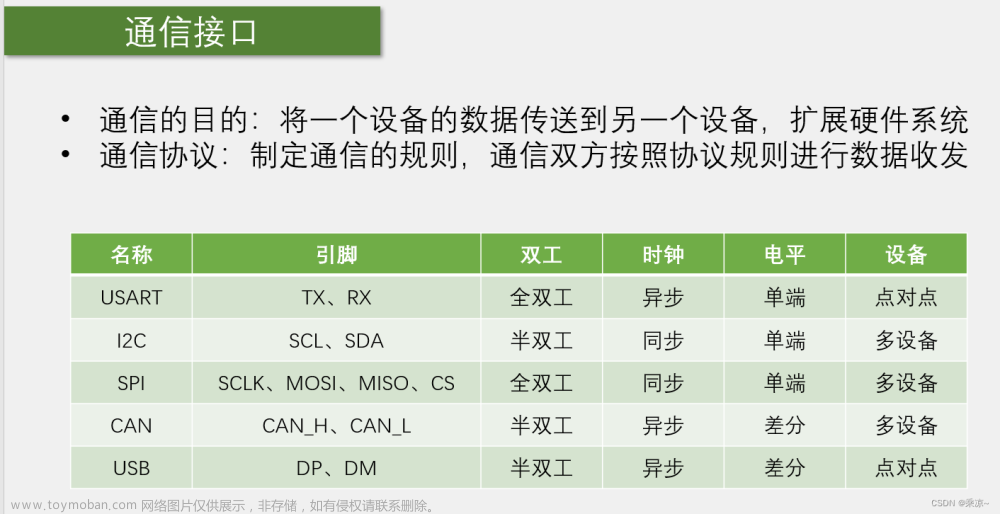
为了控制或读取外挂模块,stm32需要与外挂模块进行通信,来扩展硬件系统。而这个“通信”的过程就需要遵守相应的“通信协议”,也就是通信双方需要按照协议规则进行数据收发。不同外挂模块的会采用不同的通信协议,如下表:
| 名称 | 引脚 | 双工 | 时钟 | 电平 | 设备 |
|---|---|---|---|---|---|
| USART | TX/TXD、RX/RXD | 全双工 | 异步 | 单端 | 点对点 |
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备 |
| SPI | SCLK、MOSI、MISO、CS | 全双工 | 同步 | 单端 | 多设备 |
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备 |
| USB | DP/D+、DM/D- | 半双工 | 异步 | 差分 | 点对点 |
下面介绍一下引脚的全称:
- USART:TX(Transmit Exchange)数据发送脚、RX(Receive Exchange)数据接收脚。
- IIC:SCL(Serial Clock)时钟线、SDA(Serial Data)数据线。
- SPI:MOSI(Master Output Slave Input)主机输出数据脚、MISO(Master Input Slave Output)主机输入数据脚、CS(Chip Select)片选
- USB:DP(Data Postive)差分线正、DM(Data Minus)差分线负
注:上述协议中,单端电平都需要共地。
注:使用差分信号可以抑制共模噪声,可以极大的提高信号的抗干扰特性,所以一般差分信号的传输速度和传输距离都非常高。
本节将介绍串口。串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信。单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块互相通信,极大地扩展了单片机的应用范围,增强了单片机系统的硬件实力。
一般单片机中都会有串口的通信外设。在单片机领域中,相比于IIC、SPI等协议,串口是一种非常简单的通信接口,只支持点对点的通信。单片机与电脑通信,是串口的一大优势,可以外接电脑屏幕,非常适合调试程序、打印信息……IIC或SPI协议一般都是芯片之间的通信,有片选引脚所以支持总线通信,而不会直接外接在电脑上。

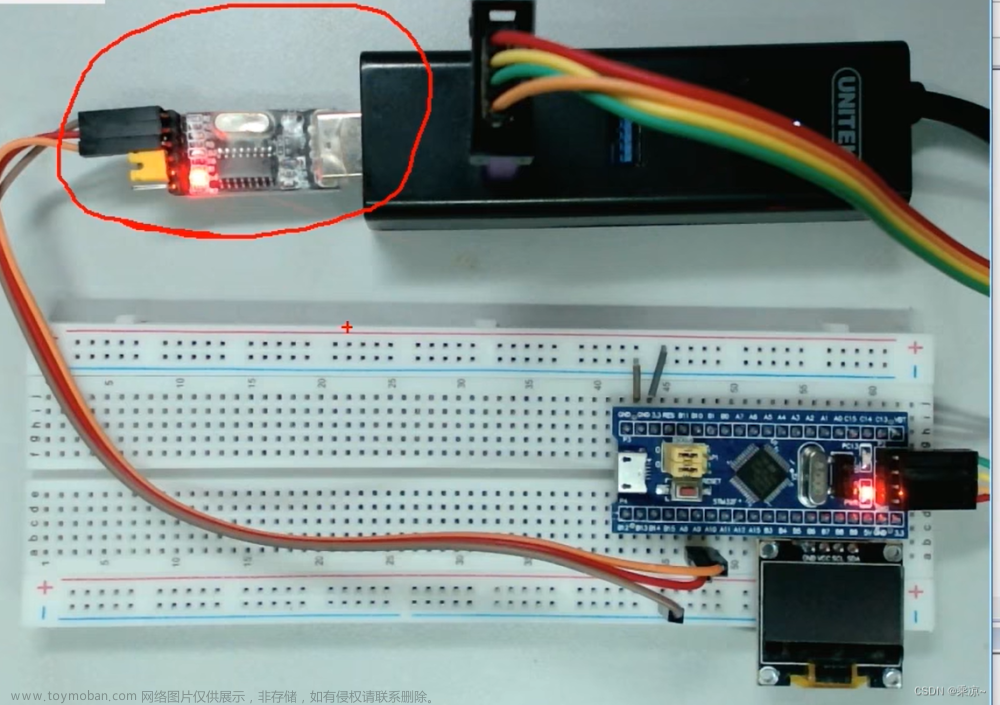
- USB转串口模块:使用CH340芯片,可以将串口协议转换成USB协议。使用此模块可以实现单片机与电脑的通信。
- 陀螺仪模块:左侧是串口引脚,右侧是IIC引脚。可以用于测量角速度、角速度等姿态参数。
- 蓝牙串口模块:上面的芯片可以和手机互联,下面四个引脚是串口引脚。此芯片可以实现手机遥控单片机的功能。

下面介绍一些串口引脚的注意事项:
- TX与RX:简单双向串口通信有两根通信线(发送端TX和接收端RX),要交叉连接。不过,若仅单向的数据传输,可以只接一根通信线。
- GND:一定要共地。由于TX和RX的高低电平都是相对于GND来说的,所以GND严格来说也算是通信线。
- VCC:相同的电平才能通信,如果两设备都有单独的供电,VCC就可以不接在一起。但如果某个模块没有供电,就需要连接VCC,注意供电电压要按照模块要求来,必要时需要添加电压转换电路。
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
- TTL电平【单片机】:+3.3V或+5V表示1,0V表示0。一般低压小型设备,使用的都是TTL电平。传输范围几十米。
- RS232电平:-3~-15V表示1,+3~+15V表示0。一般在大型机器上使用,由于环境比较恶劣,静电干扰比较大,所以通信电压都很大,并且允许波动的范围也很大。传输范围几十米。
- RS485电平:两线压差+2~+6V表示1,-2~-6V表示0(差分信号)。抗干扰能力极强,通信距离可达上千米。
注:不同电平标准之间的转换只需要加电压转换芯片即可,并不需要修改相应的软件代码。
上面介绍了串口协议的硬件部分(如何表示1/0),下面来介绍串口协议的软件部分(如何使用1/0组成字节数据)。

下面介绍串口的参数:
- 波特率:串口通信的速率(bit/s),也就是通信双方所约定的通信速率(异步通信)。
- 空闲状态:固定为高电平。
- 起始位:固定为低电平,标志一个数据帧的开始。
- 数据位:低位先行,数据帧的有效载荷,1为高电平,0为低电平。
- 校验位(选填):用于数据验证,根据数据位计算得来。
- 停止位:固定为高电平,用于表示数据帧的间隔,同时也可以使得通信线回归到空闲状态。可以配置停止位是1位/2位。

上图给出了几个例子,来展示串口通信的时序图:
- 右侧最后两个图展示了不同长度停止位的现象。
注:在stm32中,根据发送数据自动转换发送波形、或根据波形自动读取数据,都是由USART外设自动完成的,无需软件控制每一位的发送或读取。
9.2 stm32的片上外设-USART
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步收发器 是STM32内部集成的硬件外设,可根据数据寄存器的一个字节数据 自动生成数据帧时序,从TX引脚发送出去,也可 自动接收RX引脚的数据帧时序,拼接为一个字节数据,存放在数据寄存器里。USART中的“S”表示同步,只支持时钟输出,不支持时钟输入,是为了兼容别的协议或特殊用途而设计的,并不支持两个USART之间进行同步通信,所以这个功能几乎不会用到,一般更常使用的是UART同步异步收发器。下面是一些参数:
- 自带波特率发生器,最高达4.5Mbits/s,常用9600/115200。
- 可配置数据位长度(8/9)、停止位长度(0.5/1/1.5/2)。
- 可选校验位:无校验(常用)/奇校验/偶校验。
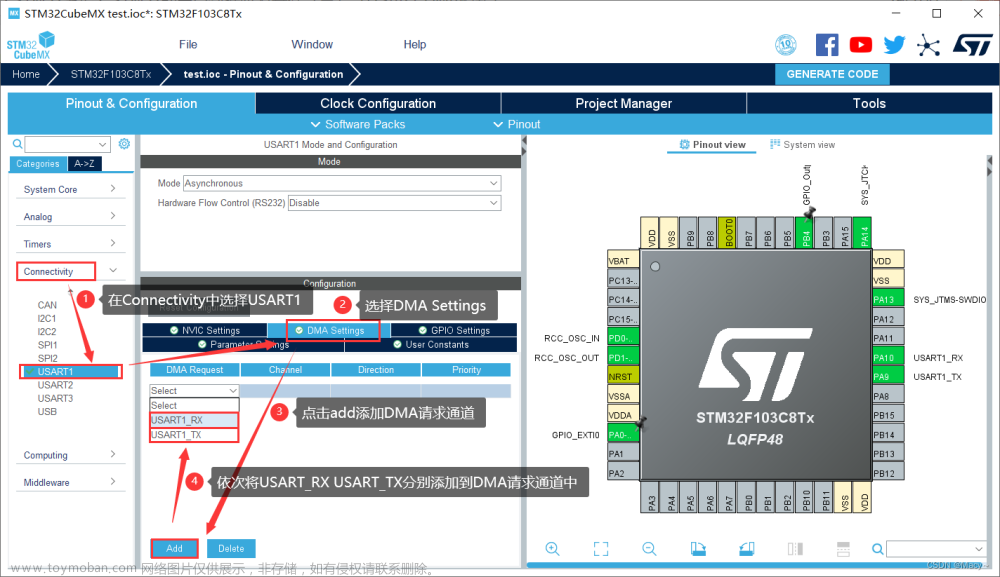
- 支持同步模式(一般不用)、硬件流控制(指示从设备准备好接收的信号,一般不用)、DMA、智能卡、IrDA(手机红外通信,但并不是红外遥控,目前很少见)、LIN(局域网的通信协议)。
- STM32F103C8T6 USART资源:USART1(APB2)、USART2(APB1)、USART3(APB1)。
| 引脚 | USART1 | USART2 | USART3 |
|---|---|---|---|
| TX | PA9/PB6 | PA2 | PB10 |
| RX | PA10/PB7 | PA3 | PB11 |
| CK | PA8 | PA4 | PB12 |
| CTS | PA11 | PA0 | PB13 |
| RTS | PA12 | PA1 | PB14 |
| 注:斜杠后面的引脚表示重定义 | |||

- 发送数据的过程:某时刻给“TDR”写入数据0x55,此时硬件检测到写入数据,就会检查当前“发送移位寄存器”是否 有数据正在进行移位,若正在移位,就会等待移位完成;若没有移位,就会将TDR中的数据立刻移动到“发送移位寄存器”中,准备发送。然后,“发送移位寄存器”就会在下面的“发送器控制”的驱动下,向右一位一位的移位(低位先行),将数据输出到TX发送引脚。移位完成后,新的数据会再次自动的从TDR转移到“发送移位寄存器”中来。有了TDR和“发送移位寄存器”的双重缓存,可以保证连续发送数据时,数据帧之间不会有空闲。
- 写入数据的时机:当数据从TDR移动到“发送移位寄存器”时,标志位TXE置位(TX Empty,发送寄存器空),此时检测到TXE置位就可以继续写入下一个数据,但注意此时上一个数据实际上还没发送出去。
- 接收数据的过程:数据从RX引脚通向“接收移位寄存器”,在“接收器控制”的驱动下,一位一位的读取RX电平并放在最高位,整个过程不断右移(低位先行),最终就可以接收1个字节。当一个字节移位完成后,这一个字节的数据就会整体地一下子转移到“接收数据寄存器RDR”中。然后就准备继续读取下一帧数据。同样,RDR和“接收移位寄存器”也组成了双重缓存结构,可以保证连续读取数据。
- 读取数据的时机:接收数据从“接收移位寄存器”转移到RDR的过程中,标志位RXNE置位(RX Not Empty,接收数据寄存器非空)。所以当检测到标志位RXNE置位时,就可以将数据读走。
下面来看看其他的硬件电路功能:
- 发送器控制:控制“发送移位寄存器”工作。
- 接收器控制:控制“接收移位寄存器”工作。
- 硬件数据流控:也就是“硬件流控制”,简称“流控”。如果主设备连续发送,导致从设备内部无法及时处理接收数据,就会出现数据丢弃或覆盖的现象(注意不是UART没接收到,而是从设备没有及时将数据从RDR取走),此时“流控”就可以帮助从设备向主设备发信号,指明自己还没有准备好接收数据,主设备也就不会发送数据了。本教程不涉及。
- nRTS(Request To Send):输出脚,请求发送。也就是告诉主设备,当前是否已经准备好接收。前方“n”表示低电平有效。
- nCTS(Clear To Send):输入脚,清除发送。用于接收从设备的nRTS信号。前方“n”表示低电平有效。
- SCLK:用于产生“同步功能”的时钟信号,配合“发送移位寄存器”输出,用于给从设备提供时钟。注意没有同步时钟输入,所以两个USART之间不能同步通信。
- 唤醒单元:实现串口挂载多设备。前面提到串口一般是点对点通信,但是这个模块通过给串口分配地址“USART地址”,就可以决定是否唤醒USART工作,进而实现了总线通信。
- 状态寄存器SR:存储着串口通信的各种标志位,其中比较重要的有发送寄存器空TXE、接收数据寄存器非空RXNE。
- USART中断控制:中断输出控制,配置中断是否可以通向NVIC。其中断申请位就是状态寄存器SR中的各种标志位。
- 波特率发生器部分:其实就是分频器,APB时钟进行分频,得到发送和接收移位的时钟。
- fPCLKx(x=1,2):时钟输入。由于UASRT1挂载在APB2上,所以 时钟输入fPCLKx(x=1,2) 就是PCLK2的时钟,一般为72MHz。而UASRT2、USART3都挂载在APB1上,所以 时钟输入fPCLKx(x=1,2) 就是PCLK1的时钟,一般为36MHz。
- /UASRTDIV:时钟分频系数。内部结构也就是虚线框中的“传统的波特率发生器”。
- /16:再进行16分频,得到最终的“发送器时钟”、“接收器时钟”。
注:发送时添加开始位、停止位;接收时去除开始位、停止位,这些工作由内部硬件电路自动完成。
注:更多关于控制寄存器CR、状态寄存器SR的描述可以查阅参考手册“25.6 USART寄存器描述”。

上图给出USART最主要、最基本的结构:
- 波特率发生器:用于产生约定的通信速率。时钟来源是PCLK2/PCLK1,经过波特率发生器分频后,产生的时钟通向发送控制器、接收控制器。
- 发送控制器、接收控制器:用于控制发送移位、接收移位。
- GPIO:发送端配置成复用推挽输出、接收端配置成上拉输入。
- 标志位:TXE置位时写入数据、RXNE置位时接收数据。
- 开关控制:用于开启整个USART外设。
下面来看几个细节的问题:
细节1:数据帧

上图给出了8位字长(无校验位)、9位字长(有校验位)的波形:
- 时钟上升沿:可以看到每个数据中间都有一个时钟上升沿,所以接收端采样时刻就是时钟上升沿。时钟的极性、相位等都可以通过配置寄存器配置。
- 空闲帧、断开帧:用于局域网协议。
- 尽量选择9位字长有校验、8位字长无校验。

stm32串口外设的停止位长度可以配置成0.5/1/1.5/1位,共四种选择,区别就是停止位的时长不一样。
- 一般就选择停止位长度为1位。
细节2:USART输入数据采样规则
串口的输出TX只需要保持相应时长的电平即可,电路简单;但是串口输入RX则需要判断电平持续时间,所以电路会更加复杂,所以下面来详细介绍stm32串口外设对于输入数据的采样。

注意到采样时钟是波特率的16倍,即会对某一位采样16次。
- 检测下降沿:若突然检测到下降沿,则开始进行检测。
- 检测3、5、7位:在第3、5、7间隔采样,采样判断原则为若三位全为0,则正常进入后续;若有2个0,则还是会接着检测,但噪声标志位NE(Noise Error)置位(告诉用户,我这儿接收的信号有噪声,你悠着点用😂);若低于2个0,则认为之前检测到的下降沿为噪声,忽略已经捕获的数据,重新回到空闲状态开始捕捉下降沿。
- 检测8、9、10位:连续采样。采样判断原则与上述相同。

由于起始位采样已经对齐了数据时钟,所以数据采样就直接在8、9、10位采样。
- 数据采样的判断原则:三个数据中,0/1哪个数据多就判断为接收到哪个。但是如果三个数据有不一致的情况,噪声标志位NE(Noise Error)置位。
细节3:计算分频系数DIV

发送器和接收器的波特率由波特率寄存器BRR里的分频系数DIV确定:
波特率
=
f
P
C
L
K
2
/
1
16
∗
D
I
V
波特率 = \frac{f_{PCLK2/1}}{16 * DIV}
波特率=16∗DIVfPCLK2/1
例如:若输入时钟为
f
P
C
L
K
2
/
1
=
72
M
H
z
f_{PCLK2/1}= 72MHz
fPCLK2/1=72MHz,希望配置波特率为9600,则分频系数为:
D
I
V
=
72
M
16
∗
9600
=
468.75
DIV=\frac{72M}{16*9600}=468.75
DIV=16∗960072M=468.75,转换成二进制为111010100.11,于是USART_BRR的值为0001_1101_0100_1100(高位补零、低位补零)。
比较方便的是,上述过程都可以使用USART的外设库函数实现,调用时只需输入波特率,库函数会自动计算出DIV,并按照格式配置好BRR寄存器。
注:十进制转二进制工具为菜鸟工具的 “在线进制转换器”。
细节4:USB转串口模块

主要关注的是该模块的供电情况。
- USB插座:直接插在电脑USB端口上,注意整个模块的供电来自于USB的VCC+5V。
- CON6插针座:
- 引脚2、引脚3:用于连接到stm32上进行串口通信。
- 引脚5【CH340_VCC】:通过跳线帽可以选择 接入+3.3V(stm32) 或者+5V。CH340芯片的供电引脚,同时决定了TTL,所以也就是串口通信的TTL电平。神奇的是,即使不接跳线帽CH340也可以正常工作,TTL为3.3V,但是显然接上电路以后更加稳定。
- 通信和供电的选择:CON6插针座选择引脚4/6进行通信后,剩下的引脚可以用于给从设备供电,但是剩下的这个脚显然与TTL电平不匹配。此时需要注意 优先保证供电电平的正确,通信TTL电平不一致问题不大。当然,若从设备自己有电源,那么就不存在这个问题了。
- TXD指示灯、RXD指示灯:若相应总线上有数据传输,那么指示灯就会闪烁。
细节5:数据模式
显然计算机在通信过程中只能传输二进制数据,那么如何发送文本呢?就需要制定一个规则,来约定字符和接收数据的映射关系,即字符编码表。不同的编码格式有不同的映射,具体可以在网上随便搜搜“字符编码格式”,如知乎文章“字符常见的编码方式”。
HEX模式/十六进制模式/二进制模式:以原始数据的形式显示;
文本模式/字符模式:以原始数据编码后的形式显示。

9.3 USART收发相关实验
9.3.1 实验1:串口发送
需求:在软件代码中定义要发送的信息,然后通过串口发送到电脑端,使用“串口助手”小工具查看。要求依次发送单字节数据、数组、字符串、数据的每一位。
注:串口助手可以切换“文本模式”/“HEX模式”。
注:数字和字符的对应关系可以参考ASCII码表。

注:接线图也可以不接OLED显示屏。

下面是代码展示:
- main.c
#include "stm32f10x.h" // Device header
#include "SerialPort.h"
int main(void){
uint8_t send_byte = 0x42;
uint8_t send_array[6] = {0x30,0x31,0x32,0x33,0x34,0x35};
//串口初始化
SerialPort_Init();
//发送单个字节
SerialPort_SendByte('A');//可以直接发送字符
SerialPort_SendByte(send_byte);
SerialPort_SendByte('\r');
SerialPort_SendByte('\n');
//发送数组
SerialPort_SendArray(send_array,6);
SerialPort_SendByte('\r');
SerialPort_SendByte('\n');
//发送字符串
SerialPort_SendString("Hello World!\r\n");
//发送数字的每一位
SerialPort_SendNum(65535, 5);
SerialPort_SendString("\r\n");
while(1){
// //循环发送数字
// SerialPort_SendByte(send_byte);
// OLED_ShowHexNum(1,9,send_byte,2);
// send_byte++;
// Delay_ms(1000);
};
}
- SerialPort.h
#ifndef __SERIALPORT_H
#define __SERIALPORT_H
void SerialPort_Init(void);
void SerialPort_SendByte(uint8_t send_byte);
void SerialPort_SendArray(uint8_t *send_array, uint16_t size_array);
void SerialPort_SendString(char *send_string);
void SerialPort_SendNum(uint32_t send_num, uint16_t send_len);
#endif
- SerialPort.c
#include "stm32f10x.h" // Device header
//串口初始化-USART1
void SerialPort_Init(void){
//1.开启RCC外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//2.初始化GPIO-PA9
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//3.初始化USART结构体
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
//4.配置中断,开启NVIC(接收数据使用)
//5.开启外设
USART_Cmd(USART1, ENABLE);
}
//串口发送1字节数据
void SerialPort_SendByte(uint8_t send_byte){
//向发送数据寄存器TDR中写入数据
USART_SendData(USART1, send_byte);
//确认数据被转移到发送移位寄存器(等待标志位TXE置位)
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)==RESET);
}
//发送一个数组
void SerialPort_SendArray(uint8_t *send_array, uint16_t size_array){
uint8_t i=0;
for(i=0;i<size_array;i++){
SerialPort_SendByte(send_array[i]);
}
}
//发送一个字符串
void SerialPort_SendString(char *send_string){
uint8_t i=0;
for(i=0; send_string[i]!='\0'; i++){
SerialPort_SendByte(send_string[i]);
}
}
//非外部调用函数-幂次函数
uint32_t SerialPort_Pow(uint32_t X, uint32_t Y){
uint32_t result = 1;
while(Y--){
result *= X;
}
return result;
}
//发送数字的每一位-先发高位
void SerialPort_SendNum(uint32_t send_num, uint16_t send_len){
uint16_t i;
for(i=0;i<send_len;i++){
SerialPort_SendByte((send_num/SerialPort_Pow(10,send_len-i-1))%10+'0');
}
}
编程感想:
- 关于接线。注意串口通信的两个设备是交叉连接的,所以“USB转串口模块”的TX应该接在stm32串口的RX(PA10)、RX应该接在stm32串口的TX(PA9)!
- 关于
sizeof。相信很多人也想到,在封装发送数组的函数时,为什么不直接在函数中使用sizeof函数来计算数组的大小呢?这样能少传递一个参数,更简洁。但实际上,这里面的水很深,这样操作是不能得到正确结果的,具体原理可以参考CSDN博文“数组名不等于指针”。最终结论就是,数组名在传参过程中,会退化成一个指针,此时所表示的大小不是数组的实际大小,而是这个指针的大小,所以要想在函数中使用到数组大小,最好还是多传递一个参数。
9.3.2 实验2:移植printf函数
需求:将C语言自带函数printf进行封装,默认成将需要打印的数据发送到串口,进而可以显示在电脑端串口助手上。
接线图、函数调用(非库函数) 与上一小节实验“串口发送”相同。本节本人目前也不懂原理,所以下面直接给出 代码展示:
方法一:
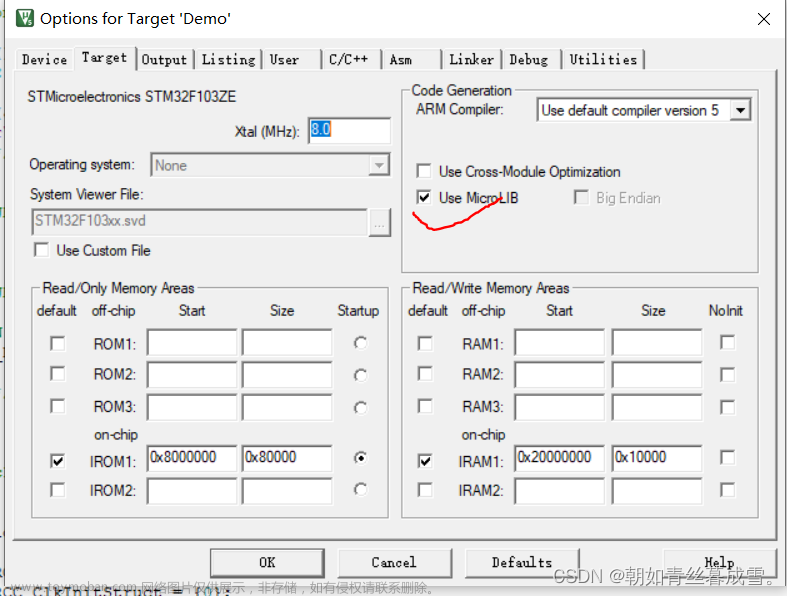
- 首先点击“魔术棒”,在Target界面的“Code Generation”方框中勾选“USE MicroLIB”。MicroLIB是Keil为嵌入式平台优化的一个精简库,要使用
printf函数就会用到这个MicroLIB精简库。 - 对
printf函数重定向,将printf函数打印的东西输出到串口。于是在 SerialPort.c 模块中添加下列代码:
#include <stdio.h>
//对printf函数重定向-将fputc函数原型重定向到串口
//注:ptintf函数本质上就是循环调用fputc,将字符一个一个输出
int fputc(int ch, FILE *f){
SerialPort_SendByte(ch);
return ch;
}
在 SerialPort.h 模块中添加下列代码:
#include <stdio.h>
- 于是就可以在 main.c 中调用
printf函数,将数据输出到串口了。
//使用重定向的printf函数
printf("%d\r\n",666);
但注意这个方法直接将printf函数重定向到了USART1,别的USART外设(USART2、USART3等)想用就没办法了。所以有如下的改进方法。
方法二:
若多个串口都想使用printf函数,那么就可以使用sprintf函数。sprintf函数可以将格式化字符输出到一个字符串里,然后再调用相应的“串口发送字符串”函数发送这个字符串,整个过程不涉及重定向,于是就实现了所有USART外设都可以打印信息到串口了。所以下面可以直接在 main.c 中定义:
char String[100];//定义一个足够长的字符串数组
sprintf(String, "Num=%d\r\n", 666);//将格式化字符串存储在String中
SerialPort_SendString(String);//串口发送字符串
方法三:
方法二的sprintf函数很方便,但是直接在主函数中写比较麻烦,于是本方法就是来封装“方法二”。具体方法如下:
- C语言可变参数。在串口模块
SerialPort.c中添加下面代码:
#include <stdarg.h>
//对sprintf函数进行封装
void SerialPort_Printf(char *format,...){
char String[100];//定义输出的字符串
va_list arg;//定义参数列表变量
va_start(arg, format);//从format位置开始接收参数表,放在arg里面
vsprintf(String, format, arg);//sprintf只接收直接写的参数,对于封装格式改用vsprintf
va_end(arg);//释放参数表
SerialPort_SendString(String);
}
//注意上述函数要在头文件中声明,但头文件就不需要再添加<stdarg.h>了。
- 直接在主函数中调用:
SerialPort_Printf("Num=%d\r\n", 888);
特殊说明:显示汉字
使用上面几种printf函数时,有可能会出现乱码,要解决这个问题,关键是要保持Keil编译器(“扳手”图标Editor界面的Encoding下拉菜单)和“串口助手”的文本编码一致。可以选择以下两种情况:
- 两者都选择UTF-8编码。但是直接在字符串写汉字,编译器有可能报错,解决方法是点击“魔术棒”–>C/C+±->最下面的Controls输入
--no-multibyte-chars即可。- 有些串口助手软件可能不兼容UTF-8,所以两者都需要选择GB2312编码。
注:更改编译器文本编码格式后,需要将文件全部关闭,重新打开,否则编码方式不会改变。
9.3.3 实验3:串口发送+接收
需求:电脑端发送数据,stm32接收到数据后,将数据在OLED显示屏上显示出来、并且回传到电脑。
程序整体思路:
- 查询。主函数不断查询RXNE标志位,但是会占用很多的CPU资源,所以不推荐。
- 中断。推荐方法,下面的演示也是基于此方法。
本实验的 接线图 与前两小节的实验均相同,下面给出 代码调用:

下面是 代码展示,仅给出在串口模块中增添的函数:
- main.c
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "SerialPort.h"
int main(void){
uint8_t Rx_byte = 0;//串口接收的单比特数据
//设置中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//OLED初始化
OLED_Init();
OLED_ShowString(1,1,"Rx_byte:");
//串口初始化
SerialPort_Init();
while(1){
if(SerialPort_GetRxFlag()==1){
Rx_byte = SerialPort_GetRxData();
OLED_ShowHexNum(1,9,Rx_byte,2);
SerialPort_SendByte(Rx_byte);
}
};
}
- SerialPort.c
uint8_t SerialPort_RxData = 0;
uint8_t SerialPort_RxFlag = 0;
//获取接收的状态
uint8_t SerialPort_GetRxFlag(void){
if(SerialPort_RxFlag==1){
SerialPort_RxFlag = 0;
return 1;
}else{
return 0;
}
}
//获取接收的数据
uint8_t SerialPort_GetRxData(void){
return SerialPort_RxData;
}
//USART1_RXNE中断函数
void USART1_IRQHandler(void){
if(USART_GetITStatus(USART1, USART_IT_RXNE)==SET){
SerialPort_RxFlag = 1;
SerialPort_RxData = USART_ReceiveData(USART1);
//读操作可以自动清零标志位,但加上也没事
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
//不要忘了将前两个函数在头文件中声明
9.4 USART串口数据包
数据包的作用是将一个个单独的数据打包,方便进行多字节的数据通信。因为实际应用中,经常需要进行数据打包。比如陀螺仪传感器需要将数据发送到stm32,其中包括X轴、Y轴、Z轴三个字节,循环不断的发送;若采用一个一个进行发送的方式,接收方就有可能分不清对应的顺序,进而出现数据错位现象。此时,若能将同一批数据进行分割和打包,就可以方便接收方识别。
1. 数据包格式的定义:

若载荷数据与包头、包尾一样怎么办呢?有三种解决思路:
- 限制载荷数据的范围。使其不会与包头、包尾重复。
- 尽量使用固定长度的数据包。只要数据长度固定,那么就可以通过包头、包尾定位数据。
- 增加包头包尾的数量,使其尽量呈现出载荷数据不会出现的状态。
注:包尾可以去除。但是这样会使得载荷数据和包头重复的问题更加严重。
若想发送16位整型数据、32位整型数据、float、double、结构体等,只需使用 uint8_t型指针 指向这些数据,就可以进行发送(将各种数据转换成字节流)。

文本数据包中,每个数据都经过了一层编码和译码。
由于包头包尾非常容易唯一确定,文本数据包基本不用担心载荷数据和包头包尾重复的问题。
优缺点比较:
- HEX数据包:
- 优点:传输最直接,解析数据非常简单,比较适合一些模块发送最原始的数据。如使用串口通信的陀螺仪、温湿度传感器。
- 缺点:灵活性不足,载荷容易和包头包尾重复。
- 文本数据包:
- 优点:数据直观易理解,非常灵活,比较适合一些输入指令进行人机交互的场合。如蓝牙模块常用的AT指令、CNC和3D打印机常用的G代码,都是文本数据包的格式。
- 缺点:解析效率低。
2. 数据包格式的收发流程:
数据包发送是非常简单的,直接发就完事儿了。但是接收数据包的过程比较复杂,这是就要考虑使用状态机。


9.5 USART数据包相关实验
9.5.1 实验1:串口收发HEX数据包
需求:自定义数据包格式,使用串口完成指定格式的数据包收发,并将收发结果显示在OLED上。另外按键的功能是将发送的当前存储的发送数据全部加1再发送出去。
- 数据包头:0xFF。
- 载荷数据:固定数据段长度为4个字节。
- 数据包尾:0xFE。


下面是代码展示:其中将串口的模块的数据接收部分全部删除,重写。
- main.c
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "SerialPort.h"
#include "Key.h"
int main(void){
//存储串口接收的HEX数据包
uint8_t *Rx_Packet = SerialPort_GetRxPacket();
//存储串口发送的HEX数据包
uint8_t Tx_Packet[4] = {0x01,0x02,0x03,0x04};
//设置中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//OLED初始化
OLED_Init();
OLED_ShowString(1,1,"Rx_Packet:");
OLED_ShowString(3,1,"Tx_Packet:");
//串口初始化
SerialPort_Init();
//按键初始化
Key_Init();
while(1){
//显示接收到的数据
if(SerialPort_GetRxFlag()==1){
OLED_ShowHexNum(2,1,*Rx_Packet,2);
OLED_ShowHexNum(2,4,*(Rx_Packet+1),2);
OLED_ShowHexNum(2,7,*(Rx_Packet+2),2);
OLED_ShowHexNum(2,10,*(Rx_Packet+3),2);
}
//检测按键,发送数据包到电脑
if(Key_GetNum()==1){
Tx_Packet[0]++;
Tx_Packet[1]++;
Tx_Packet[2]++;
Tx_Packet[3]++;
SerialPort_SendPacket(Tx_Packet);
OLED_ShowHexNum(4,1,Tx_Packet[0],2);
OLED_ShowHexNum(4,4,Tx_Packet[1],2);
OLED_ShowHexNum(4,7,Tx_Packet[2],2);
OLED_ShowHexNum(4,10,Tx_Packet[3],2);
}
};
}
- SerialPort.c新增函数
uint8_t SerialPort_RxPacket[4];
uint8_t SerialPort_RxPacketFlag = 0;
//获取接收的状态
uint8_t SerialPort_GetRxFlag(void){
if(SerialPort_RxPacketFlag==1){
SerialPort_RxPacketFlag = 0;
return 1;
}else{
return 0;
}
}
//获取接收的HEX数据包
uint8_t* SerialPort_GetRxPacket(void){
return SerialPort_RxPacket;
}
//发送HEX数据包
void SerialPort_SendPacket(uint8_t *send_array){
SerialPort_SendByte(0xFF);
SerialPort_SendArray(send_array, 4);
SerialPort_SendByte(0xFE);
}
//USART1_RXNE中断函数
void USART1_IRQHandler(void){
uint8_t rec_byte;
static uint8_t rx_state;
static uint8_t rx_index;
if(USART_GetITStatus(USART1, USART_IT_RXNE)==SET){
rec_byte = USART_ReceiveData(USART1);
//利用状态机,接收HEX数据包
if(rx_state==0){
if(rec_byte==0xFF){
rx_index = 0;
rx_state = 1;
}
}else if(rx_state==1){
SerialPort_RxPacket[rx_index] = rec_byte;
rx_index++;
if(rx_index>=4){
rx_state = 2;
}
}else if(rx_state==2){
if(rec_byte==0xFE){
SerialPort_RxPacketFlag = 1;
rx_state = 0;
}
}
//读操作可以自动清零标志位,但加上也没事
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
//除了中断函数,其余函数还要在头文件SerialPort.h中声明
编程感想:
- 数据混叠。若电脑端连续发送数据包,而stm32处理不及时,会导致数据错位。但是一般像传感器模块等的数据都具有连续性,所以就算数据错位也没关系。
- 发送数据不匹配。注意发送字节数据一定要写成
0x11的形式,而不是直接写一个11进行发送。- 收发数据没反应。注意一定要在最开始声明的地方赋初值,否则有可能读不出数据。当然,还有一种可能是串口连接不稳定,可以重新拔插一下串口。
9.5.2 实验2:串口收发文本数据包
需求:使用电脑端发送指定格式的文本数据包,来控制单片机点亮或熄灭LED灯,单片机完成指令后再将接收的状态回传到电脑。
- 数据包头:@。
- 数据包:有效指令为"@LED_ON\r\n"、“@LED_OFF\r\n”。(不定字长)
- 数据包尾:\r\n。


下面是代码展示:
- main.c
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "SerialPort.h"
#include "LED.h"
#include <string.h>
int main(void){
//存储串口接收的HEX数据包
char *Rx_Packet = SerialPort_GetRxPacket();
//设置中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//OLED初始化
OLED_Init();
OLED_ShowString(1,1,"Rx_Packet:");
OLED_ShowString(3,1,"Tx_Packet:");
//串口初始化
SerialPort_Init();
//LED初始化
LED_Init();
while(1){
//对接收到的文本进行判断
if(SerialPort_GetRxFlag()==1){
//OLED显示接收到的文本
OLED_ShowString(2,1," ");
OLED_ShowString(2,1,Rx_Packet);
//根据接收的内容执行相应的动作
if(strcmp(Rx_Packet, "LED_ON")==0){
LED1_ON();
OLED_ShowString(4,1," ");
OLED_ShowString(4,1,"LED_ON_OK");
SerialPort_SendString("LED_ON_OK\r\n");
}else if(strcmp(Rx_Packet, "LED_OFF")==0){
LED1_OFF();
OLED_ShowString(4,1," ");
OLED_ShowString(4,1,"LED_OFF_OK");
SerialPort_SendString("LED_OFF_OK\r\n");
}else{
OLED_ShowString(4,1," ");
OLED_ShowString(4,1,"ERROR_COMMAND");
SerialPort_SendString("ERROR_COMMAND\r\n");
}
}
};
}
- SerialPort.c新增函数(将上一节HEX数据包部分全部删除)
char SerialPort_RxPacket[100];
uint8_t SerialPort_RxPacketFlag = 0;
//获取接收的状态
uint8_t SerialPort_GetRxFlag(void){
if(SerialPort_RxPacketFlag==1){
SerialPort_RxPacketFlag = 0;
return 1;
}else{
return 0;
}
}
//获取接收的HEX数据包
char* SerialPort_GetRxPacket(void){
return SerialPort_RxPacket;
}
//USART1_RXNE中断函数
void USART1_IRQHandler(void){
uint8_t rec_byte;
static uint8_t rx_state;
static uint8_t rx_index;
if(USART_GetITStatus(USART1, USART_IT_RXNE)==SET){
rec_byte = USART_ReceiveData(USART1);
//利用状态机,接收HEX数据包
if(rx_state==0){
if(rec_byte== '@'){
rx_index = 0;
rx_state = 1;
}
}else if(rx_state==1){
if(rec_byte != '\r'){
SerialPort_RxPacket[rx_index] = rec_byte;
rx_index++;
}else{
rx_state = 2;
}
}else if(rx_state==2){
if(rec_byte == '\n'){
SerialPort_RxPacket[rx_index] = '\0';//字符串结束标志符
SerialPort_RxPacketFlag = 1;
rx_state = 0;
}
}
//读操作可以自动清零标志位,但加上也没事
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
//除了中断函数,其他函数还要在头文件SerialPort.h中声明
- LED.c新增函数
/**
* @brief LED1亮
*/
void LED1_ON(void){
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
/**
* @brief LED1灭
*/
void LED1_OFF(void){
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
//注意还要在头文件LED.h中声明
编程感想:
- 数据混叠。同样的问题,如果电脑端发送指令太快,就有可能导致stm32来不及处理,导致错误。一个解决方法是指令发慢一点;当然另一种方法是增加标志位,当LED的状态没有改变之前,不理会接收数据,这样会破坏当前程序的独立性,并且原理不复杂,我就先不写了。
9.6 软件使用:FlyMcu串口下载 & STLINK Utility
- FlyMcu可以通过串口给stm32下载程序。绿色软件,无需安装。
- STLINK Utility通过STLINK给stm32下载程序。需要安装。
以上两款软件类似于51单片机的程序烧录软件——STC-ISP,可以通过串口给51单片机下载程序。
硬件方面,接线图本章的第一个实验“串口发送”相同,这是因为该芯片的串口下载只适配了USART1,所以引脚都要连接在USART1引脚上。
下面依次介绍FlyMcu、STLINK Utility:

FlyMcu只能下载HEX文件,Keil生成HEX文件 的方法:
- 点击“魔术棒”–>Output选项卡–>勾选“Create HEX File”。编译过后,就可以在工程目录的“Object文件夹”下找到该工程的HEX文件——“工程名.hex”。
使用FlyMcu下载程序:
- 配置下载串口:点击菜单栏“搜索串口”,稍等一会,点击紧随其后的“Port:xx”选项,选择对应的串口。接着点击紧随其后的“bps:xx”选择下载的波特率。
- 选择程序文件。菜单栏下一行,点击“…”按钮,选择HEX文件。
- 其他功能保持默认。
- 调整启动位置为BootLoader程序。由于串口下载需要使得stm32的启动位置为BootLoader启动程序,而BootLoader启动程序固定放在“系统存储器”,所以BOOT引脚应调整为 [BOOT1,BOOT0]=[0,1]。注意调整BOOT后,一定要按一下最小系统板上的复位键,调整才会生效。

- 点击FlyMcu的“开始编程”。此时程序就会被下载到主闪存中了,但由于BOOT引脚没有变动,所以程序下载完复位后,还是会停留在BootLoader程序中。
- 调整启动位置为主闪存。BOOT引脚应调整为 [BOOT1,BOOT0]=[0,0],然后按下复位键,就可以看到程序正常运行了。
注:关于串口下载的原理,我觉得前面将“存储器映像”时已经说得很清楚了,就不记录了,UP讲解的地方在“P30 [9-6] FlyMcu串口下载&STLINK Utility 中的4:56~8:11”。
每次下载程序都要拔插两边跳线帽,太麻烦了,有什么更简单的方法吗?
- 方法一:设计外围的STM32一键下载电路。利用“USB转串口模块”上CH340的 RTS#、DTR# 两个流控输出引脚分别控制stm32的BOOT0引脚、复位引脚(但是不使用流控功能,而仅仅只是当作一个普通的GPIO口),加上FlyMcu的选项,便可以利用电路自动切换BOOT引脚的高低电平。
- 方法二:软件设置自动跳转(一次性功能)。勾选FlyMcu的“编程后执行”,去除勾选“编程到FLASH时写选项字节”。然后 [BOOT1,BOOT0]=[0,1],并按下复位键。然后点击“开始编程”,就可以看到程序正常执行。
方法二评价:该方法原理是下载程序后,软件设置从主闪存(0x08000000)开始执行程序,但是按下复位键后,程序又会回到“系统存储器”执行BootLoader程序。所以可以不断的使用串口调试程序,最后调试成功后再将BOOT引脚切换回来即可。也就是,只需要最开始和最后切换跳线帽而已。
读FLASH: 读取主闪存中的程序数据,以BIN文件格式存储(BIN文件不包含地址信息,HEX文件包含地址信息)。后续可以使用STLINK Utility下载,实现盗取他人软件劳动成果😂。
清除芯片: 将主程序区域全部擦除(全部变成高电平)。
读器件信息: 读取芯片的信息。但是FLASH容量、SRAM容量等信息可能会出错。
设定选项字节等: 可以设置选项字节的各项参数。点击“STM32F1选项设置”,弹出以下界面:
- 读保护字节:是否允许读出主闪存数据。注意如果“阻止读出”,那么就无法使用Keil下载程序了。另外,在清除读保护的同时,同时也会清空主闪存的数据。
- 硬件选项字节:有需求可以使用。
- 用户数据字节:有需求可以使用。那使用选项字节存储数据有什么好处呢?
- 选项字节的数据相当于是“世外桃源”,无论如何下载程序,选项字节中的数据都可以不变,可以存储一些不随程序变化的参数;
- 用上位机(如FlyMcu、STLINK Utility)可以很方便的修改。
- 写保护字节:可以对Flash的某几页单独写保护。比如在主程序的最后几页写了一些自定的数据,不希望在下载时被擦除,就可以将最后几页设置写保护锁起来。注意,开启“写保护”后,若需要对保护区写入程序就会出错!并且该软件不支持单独写入选项字节,只能在Flash下载时顺便写入选项字节,那也就是说,如果将Flash前几页写保护了,就再也无法使用FlyMcu下载程序了!!(使用STLINK Utility可以补救回来)
注意配置好选项字节数据后,点击“采用这个设置”,并在FlyMcu主界面勾选“编程到FLASH时写选项字节”。


STLINK Utility需要安装,安装完成后,在桌面上存在快捷方式。STLINK Utility可以下载多种文件,包括HEX文件、BIN文件等。下面演示 下载程序的流程:
- 硬件接线。无需连接“USB转串口模块”,只需连接STLINK即可。BOOT引脚设置为 [BOOT1,BOOT0]=[0,0],然后按下复位键。点击左起第三个按钮进行连接。
- 左起第一个按钮:打开程序文件,支持HEX格式、BIN格式。(也可以直接跳到下一步)
- 左起第六个按钮:下载程序。跳过上一步的,此时选择程序文件。然后点击“Start”下载程序。下载完成后可以发现程序正常运行。
选项字节的配置:菜单栏“Target”–>“Option Byte…”,下面依次介绍:
- 读保护。
- 硬件参数。灰色的选项就是本芯片不支持的选项。
- 用户参数。
- 写保护。
注:配置好之后点击“Apply”,就可以直接单独更改选项字节的参数。文章来源:https://www.toymoban.com/news/detail-633964.html
左起第二个按钮:读芯片数据,格式可以选为HEX格式、BIN格式。
左起第四个按钮:断开连接。
左起第五个按钮:擦除芯片。
STLINK固件更新:菜单栏“ST-LINK”–>Firmware update–>重新拔插STLINK–>点击“Device Connect”–>“Yes>>>>”。文章来源地址https://www.toymoban.com/news/detail-633964.html

到了这里,关于stm32学习笔记-9 USART串口的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!