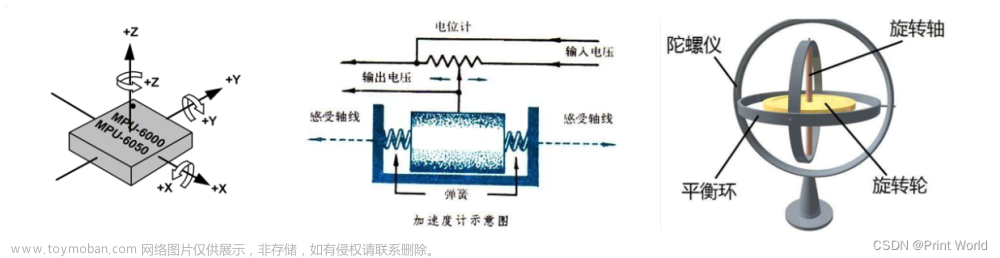
由于近期在搞IMU的姿态解算,需要用一个IMU传感器去进行角度的获取,因此采用了最实惠的MPU6050!通过IIC读取MPU6050后的数据只是简单的数值,并没有物理意义,因此本文主要记录下如何将MPU6050的数据换算成有意义的物理值。
要得到MPU6050的具体参数,那必须是官方的datasheet啦!
目录
一、Gyro角速度的换算
二、ACC加速度的换算
一、Gyro角速度的换算

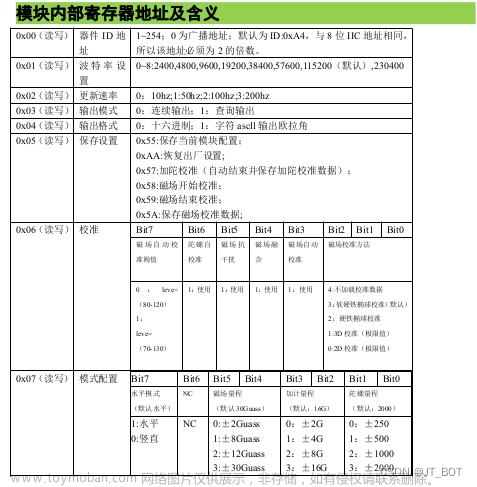
首先陀螺仪有4个量程,由于我设置的FS_SEL 为 3,因此量程为±2000°/s

陀螺仪的测量的精度为16位,因此也就是int16,故范围为:-32768~32767
因此灵敏度为:32767/2000 = 16.40 °/s

但由于我们一般要使用弧度制,也就是要角度转化为弧度
2*π / 360°
故最终计算公式为:(Gyro_X / 16.40 °/s ) * 2*π / 360°
也可以表示为:Gyro_X * 0.001064
二、ACC加速度的换算

加速度有4个量程,由于我设置的AFS_SEL 为 0 ,因此量程为 ±2g

加速度的测量的精度为16位,因此也就是int16,故范围为:-32768~32767
因此灵敏度为:32767/2 = 16384 g
 文章来源:https://www.toymoban.com/news/detail-634053.html
文章来源:https://www.toymoban.com/news/detail-634053.html
故最终计算公式为:ACC_X / 16384 g 文章来源地址https://www.toymoban.com/news/detail-634053.html
到了这里,关于【机器人学习】MPU6050数据的换算的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!