-
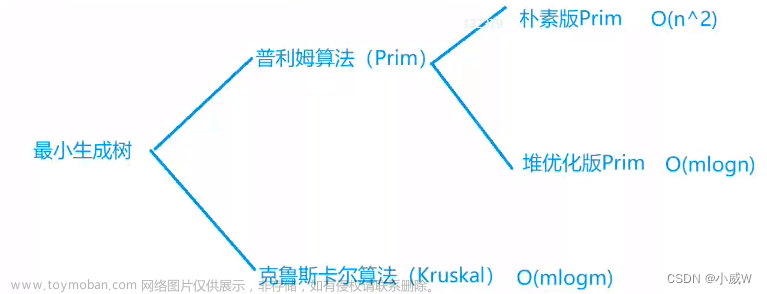
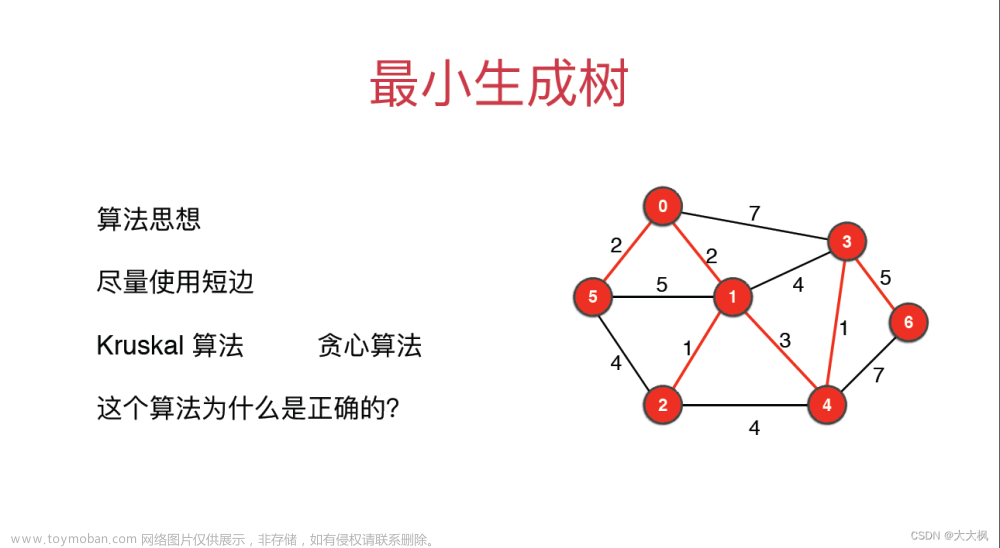
最小生成树
-
Prim算法
- 朴素版Prim O(n^2)
- 稠密图
- 步骤:
- S:表示最小生成树的集合
- 初始化距离
- 找距离集合S最近的节点
- 将节点加入集合S
- 用该节点更新非S点到集合S点的距离
- 代码:
const int N = 510; const int INF = 0x3f3f3f3f; int g[N][N]; int d[N];//非生成树节点与生成树节点的最短距离 int st[N]; int n, m; int prim(){ memset(d, 0x3f, sizeof d);//初始化 int res = 0;//记录生成树权值和 for(int i = 0; i < n; ++ i){//遍历n次选取n个点加入生成树 int t = 0; for(int j = 1; j <= n; ++ j){ if(!st[j] && (!t || d[j] < d[t]))//在非生成树集合中选取最小距离的点 t = j; } st[t] = 1;//加入生成树集合 if(i && d[t] == INF) return INF;//某个点与生成树集合不联通,则不存在生成树 if(i) res += d[t]; //累加最小权值 for(int j = 1; j <= n; ++ j) //更新其他点到生成树的距离 d[j] = min(d[j], g[t][j]); } return res; } int main(){ cin >> n >> m; memset(g, 0x3f, sizeof g); while(m -- ){ int u, v, w; cin >> u >> v >> w; g[u][v] = g[v][u] = min(g[u][v], w);//无向图去重边 } int t = prim(); if(t == INF) cout << "impossible"; else cout << t; return 0; }
-
堆优化版Prim O(mlogn)
- 用堆优化找最短距离的过程将O(n)-->O(1)
- 朴素版Prim O(n^2)
-
Kruskal算法 O(mlogm)
- 稀疏图
- 步骤:
- 将所有边的权值从小到大排序
- 枚举每条边u--v, w
- 若u,v不同时在生成树集合中,那么将这条边加入集合
- 利用并查集
- 代码:
const int N = 2e5 + 10; const int INF = 0x3f3f3f3f; int f[N]; struct edge{ int u, v, w; //运算符重载 bool operator< (const edge &e)const{ return w < e.w; } }edges[N]; int n, m; int find(int x){ return x == f[x] ? x : (f[x] = find(f[x])); } int kruskal(){ sort(edges + 1, edges + 1 + m);//权值排序 for(int i = 1; i <= n; ++ i) f[i] = i;//并查集初始化 int res = 0, cnt = 0;//res记录总权值,cnt记录边的条数 for(int i = 1; i <= m; ++ i){//遍历每条边 int u = edges[i].u;//获取信息 int v = edges[i].v; int w = edges[i].w; u = find(u), v = find(v);//祖宗节点 if(u != v){//不在同一集合中 res += w; cnt ++ ; f[u] = v;//加入同一集合 } } if(cnt < n - 1) return INF;//边数小于节点数-1,则不连通,不存在最小生成树 else return res; } int main(){ cin >> n >> m; for(int i = 1; i <= m; ++ i){ int a, b, c; cin >> a >> b >> c; edges[i] = {a, b, c}; } int t = kruskal(); if(t == INF) cout << "impossible"; else cout << t; return 0; }
-
-
二分图
-
判别二分图-染色法 O(m + n)
- 一个图是二分图当接近当图中不含有奇数(就是离散数学中的二部图)
- 代码:
const int N = 1e5 + 10; const int M = 2 * N; int h[N], e[M], ne[M], idx = 1; int color[N]; int n, m; void add(int u, int v){ e[idx] = v; ne[idx] = h[u]; h[u] = idx; idx ++ ; } //dfs染色,并且判断染色过程是否有矛盾 bool dfs(int u, int c){ color[u] = c;//染色 for(int i = h[u]; i; i = ne[i]){//遍历邻接点 int j = e[i]; if(!color[j]){//没有染色就染色 if(!dfs(j, 3 - c)) return false;//染色出现矛盾 }else if(color[j] == c) return false;//已经染色,判断相邻点是否同色 } return true; } int main(){ cin >> n >> m; while(m -- ){ int u, v; cin >> u >> v; add(u, v);//无向图建边 add(v, u); } bool flag = true; for(int i = 1; i <= n; ++ i){//以所有点为起点染色,因为可能不连通 if(!color[i]){ flag = dfs(i, 1); if(!flag) break; } } if(flag) cout << "Yes"; else cout << "No"; return 0; }
-
匈牙利算法 最坏O(mn)
- 求二分图的最大匹配数
- 代码:
const int N = 510; const int M = 1e5 + 10; int h[N], e[M], ne[M], idx = 1; int match[N]; int st[N]; int n1, n2, m; void add(int a, int b){ e[idx] = b; ne[idx] = h[a]; h[a] = idx ++ ; } bool find(int x){ for(int i = h[x]; i; i = ne[i]){ //遍历该节点邻接的所有节点 int j = e[i]; if(!st[j]){ st[j] = 1;//不管j有没有匹配过,强制标记为已经匹配,为了防止匹配j的节点再次将j匹配 if(!match[j] || find(match[j])){ //j没有匹配或者匹配j的节点可以换一个匹配,在换匹配的过程中不会再匹配j,因为j已经被标记 match[j] = x; //将x与j匹配 return true; //成功匹配 } } } return false; } int main(){ cin >> n1 >> n2 >> m; while(m -- ){ int a, b; cin >> a >> b; add(a, b); //只用一次 } int res = 0;//记录最大匹配数 for(int i = 1; i <= n1; ++ i){//匹配每一个节点 memset(st, 0, sizeof st); if(find(i)) res ++ ; //匹配成功 } cout << res; return 0; }
- 最大流算法
-
文章来源地址https://www.toymoban.com/news/detail-634767.html
文章来源:https://www.toymoban.com/news/detail-634767.html
到了这里,关于[图论第三节]最小生成树/二分图的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![【算法每日一练]-图论(保姆级教程篇7 最小生成树 ,并查集模板篇)#村村通 #最小生成树](https://imgs.yssmx.com/Uploads/2024/02/759236-1.png)