0.引言
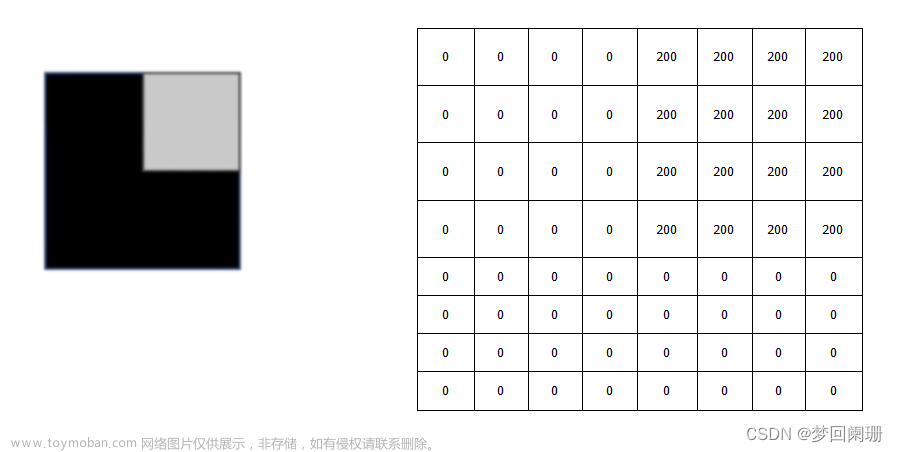
在图像处理中,梯度是指图像中像素灰度变化的速率或幅度,我们先来看下面这张图

假设我们想要计算出A点的梯度,我们可以发现A点位于边缘点,A点左边为黑色,右边为白色,而计算图像的梯度可以提取出图像中的边缘信息,我们常用的方法是使用Sobel算子或Scharr算子进行梯度计算。接下来我们分别来看看具体是如何做的
1. Sobel算子
和我们之前介绍的各种图像计算的方法类似,我们利用某一个大小的卷积核来进行计算,我们这里也一样,Sobel算子有两个核,一个用于计算图像在水平方向上的差异(x方向梯度),另一个用于计算图像在垂直方向上的差异(y方向梯度)。这两个核可以在水平和垂直方向上检测出图像中的边缘信息。
下面是Sobel算子在x和y方向上的核矩阵:

我们来看他这个是如何来识别边缘的,以x方向为例,如果两边相差太大了,那么结果的绝对值也会比较大,说明应该在边缘点附近,如果两边值非常接近,则结果也会趋于0,此时说明不在边缘地附近。y方向也是同理。接下来我们看一下如何在Opencv中实现,我们调用cv2.Sobel()函数,
dst = cv2.Sobel(src, ddepth, dx, dy, ksize)
- ddepth:输出图像的深度(数据类型),一般我们指定为64位浮点数型,设为CV_64F
- dx和dy分别表示水平和竖直方向
- ksize是Sobel算子的大小
我们以下面这张图为例计算梯度,
# 导入原始图
img = cv2.imread('pie.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow("img",img)
cv2.waitKey()
cv2.destroyAllWindows()

x方向计算梯度
# 定义图像展示函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
cv_show(sobelx,'sobelx')

我们发现只有一半。我们来思考一个问题哈,从黑到白是正数,白到黑就是负数了,所有的负数会被截断成0,所以导致我们右半边的边缘无法显示,因此我们要取绝对值来解决这个问题。
我们调用cv2.convertScaleAbs(sobelx) 实现将结果转换为无符号8位整数
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx) #实现将结果转换为无符号8位整数
cv_show(sobelx,'sobelx')

现在我们基本找到了边缘,接下来我们还需要看y方向的情况
计算y方向的梯度
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
cv_show(sobely,'sobely')

现在我们分别得到了x方向和y方向的边缘,接下来我们进行求和处理。
求和
调用cv2.addWeighted函数
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')

接下来,我们以之前小狗洋气的图片来看一下它的梯度结果
# 原始图像
img = cv2.imread('yangqi.jpg',cv2.IMREAD_GRAYSCALE)
cv_show(img,'img')

接下来我们来看一下求梯度后的结果
img = cv2.imread('yangqi.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')

可以看到,我们把图片所有的轮廓都给提取出来了。
Sobel算子具有简单且易于实现的优点,它对噪声有一定的抑制作用,并可以快速检测出图像中的边缘。然而,Sobel算子也存在一些局限性,如对于较弱的边缘响应不敏感,并且可能会产生较粗的边缘。对于更复杂的场景,可能需要结合其他的边缘检测算法或采用更高级的技术。
2. Scharr算子
Scharr算子和Sobel算子很像,但在边缘检测方面具有更好的性能。Scharr算子也是基于一阶导数的近似,和Sobel算子一样,Scharr算子也有两个3x3的核、
具体核矩阵如下:

在Opencv中,我们调用cv2.Scharr()函数实现。
scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0) cv_show(scharrxy,'scharr')

从结果来看,与Sobel算子相比,检测出来的边缘更多,因为Scharr算子具有更高的方向敏感性和更好的旋转不变性,能够更准确地检测到边缘,并且在边缘方向变化较大的情况下效果更好。因此,在很多应用中,Scharr算子常常被用作替代Sobel算子的选择。
3. Laplacian算子
Laplacian算子常用于检测图像中的边缘和纹理,但是它计算图像的二阶导数,以此捕捉到图像中的灰度变化,它只有一个核

在Opencv中,我们调用cv2.Laplacian()函数实现,因为这里只有一个核,因此不用分别计算x方向和y方向,直接计算一个即可
laplacian = cv2.Laplacian(img,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)

从结果来看,Laplacian单独使用对边缘检测的效果一般,因为它是一个二阶导数运算,所以图像中的噪声会被放大。因此,在应用Laplacian算子之前,可能需要对图像进行预处理,例如平滑/模糊来降低噪声的影响,我们一般不会单独使用Laplacian算子,而是结合其他的方法使用。文章来源:https://www.toymoban.com/news/detail-635197.html
🔎本章的介绍到此介绍,如果文章对你有帮助,请多多点赞、收藏、评论、订阅支持!!《Opencv入门到项目实战》文章来源地址https://www.toymoban.com/news/detail-635197.html
到了这里,关于【Opencv入门到项目实战】(四):图像梯度计算|Sobel算子|Scharr算子|Laplacian算子的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!