MSP432P401R基础使用
一、GPIO输出 点灯 跑马灯
(一)GPIO输出
打开芯片数据手册(msp432p401r)第17页的表详细描述了对应引脚的GPIO功能
1.库函数
- 配置GPIO模式:
GPIO_setAOutputPin(Port,pin)//设置GPIO为输出模式
- 设置高低电平
GPIO_setOutputHoghOnPin(Port,Pin)//设置GPIO为高电平
GPIO_setOutputLowOnPin(Port,Pin)//设置GPIO为低电平
GPIO_toggleOutputOnPin(Port,Pin)//翻转GPIO引脚电平
- 配置驱动强度
只有P2.0、P2.1、P2.2、P2.3引脚可以配置为高驱动程度
This I/O can be configured for high drive operation with up to 20-mA drive capability.
此I/O可配置为高达20 mA驱动能力的高驱动操作。
GPIO_setDriveStrengthHigh(Port,Pin)//强驱动
GPIO_setDriveStrengthLow(Port,Pin)//弱驱动(无特殊要求,一般不用设置)
//几乎不用,需要使用时自行查看参数、返回值等详细信息
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
int main(void)
{
// 初始化 MSP432P401R 微控制器
MAP_WDT_A_holdTimer();
// 配置 P1.0 引脚为输出模式
MAP_GPIO_setAsOutputPin(GPIO_PORT_P1, GPIO_PIN0);
// 设置 P1.0 引脚的驱动强度为高级别
MAP_GPIO_setDriveStrengthHigh(GPIO_PORT_P1, GPIO_PIN0);
while (1)
{
// 在 P1.0 引脚输出高电平
MAP_GPIO_setOutputHighOnPin(GPIO_PORT_P1, GPIO_PIN0);
// 延时约一秒钟
MAP_PCM_gotoLPM0();
}
}
(二)点亮LED灯
1.硬件连接
可以打开评估版手册(MSP432开发板手册/slau597f)37页原理图

共阴极连接,高电平亮,低电平熄灭
2.代码
led.h
#ifndef __LED_H
#define __LED_H
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
// 位带操作
#define LED_RED BITBAND_PERI(P1OUT,0)
#define LED_R BITBAND_PERI(P2OUT,0)
#define LED_G BITBAND_PERI(P2OUT,1)
#define LED_B BITBAND_PERI(P2OUT,2)
void LED_Init(void);//LED初始化函数
void LED_RED_On(void);//打开LED1
void LED_RED_Off(void);//关闭LED1
void LED_RED_Tog(void);//翻转LED1
void LED_Y_On(void);//打开黄色RGB灯
void LED_C_On(void);//打开青色RGB灯
void LED_P_On(void);//打开品红RGB灯
void LED_R_On(void);//红色RGB灯
void LED_G_On(void);//绿色RGB灯
void LED_B_On(void);//蓝色RGB灯
void LED_R_Off(void);
void LED_G_Off(void);
void LED_B_Off(void);
void LED_R_Tog(void);
void LED_G_Tog(void);
void LED_B_Tog(void);
void LED_W_On(void);//白色RGB灯
void LED_W_Off(void);
void LED_W_Tog(void);
#endif
led.c
#include "led.h"
void LED_Init(void)
{
MAP_GPIO_setAsOutputPin(GPIO_PORT_P1, GPIO_PIN0);//设置GPIO为输出模式
MAP_GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN0 + GPIO_PIN1 + GPIO_PIN2);
LED_RED_Off();
LED_R_Off();
LED_G_Off();
LED_B_Off();
}
void LED_RED_On(void) { LED_RED = 1; }
void LED_RED_Off(void) { LED_RED = 0; }
void LED_RED_Tog(void) { LED_RED ^= 1; }
void LED_R_Off(void) { LED_R = 0;}
void LED_G_Off(void) { LED_G = 0;}
void LED_B_Off(void) { LED_B = 0; }
void LED_R_On(void) { LED_R = 1; }
void LED_G_On(void) { LED_G = 1; }
void LED_B_On(void) { LED_B = 1; }
void LED_R_Tog(void) { LED_R ^= 1; }
void LED_G_Tog(void) { LED_G ^= 1; }
void LED_B_Tog(void) { LED_B ^= 1; }
//白色 White
void LED_W_On(void)
{
LED_R_On();
LED_G_On();
LED_B_On();
}
//白色 White
void LED_W_Off(void)
{
LED_R_Off();
LED_G_Off();
LED_B_Off();
}
//白色 White
void LED_W_Tog(void)
{
LED_R_Tog();
LED_G_Tog();
LED_B_Tog();
}
//黄色 Yellow
void LED_Y_On(void)
{
LED_R_On();
LED_G_On();
LED_B_Off();
}
//品红 Pinkish red
void LED_P_On(void)
{
LED_R_On();
LED_G_Off();
LED_B_On();
}
//青色 Cyan
void LED_C_On(void)
{
LED_R_Off();
LED_G_On();
LED_B_On();
}
main.c
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
/* Standard Includes */
#include <stdint.h>
#include <stdbool.h>
#include "led.h"
int main(void)
{
uint32_t i;
/* Stop Watchdog */
MAP_WDT_A_holdTimer();//关闭看门狗
LED_Init();//LED初始化
while (1)
{
LED_RED_On();
for (i = 0; i < 500000; i++);
LED_RED_Off();
LED_R_On();
for (i = 0; i < 500000; i++);
LED_R_Off();
LED_G_On();
for (i = 0; i < 500000; i++);
LED_G_Off();
LED_B_On();
for (i = 0; i < 500000; i++);
LED_B_Off();
LED_C_On();
for (i = 0; i < 500000; i++);
LED_P_On();
for (i = 0; i < 500000; i++);
LED_Y_On();
for (i = 0; i < 500000; i++);
LED_W_On();
for (i = 0; i < 500000; i++);
LED_W_Off();
}
}
二、GPIO做输入 按键输入
(一)GPIO做输入
1.库函数
配置GPIO模式:
GPIO_setAslnputPin(Port,Pin);//设置为浮空输入
GPIO_setAslnputWithPullUpResistor(Port,Pin);//设置为上拉输入模式
GPIO_setAslnputWithPullDownResistor(Port,Pin);//设置为下拉输入模式
获取电平状态:
GPIO_getlnputPinValue(Port,Pin);
(二)按键输入
1.硬件连接
可以打开评估版手册(MSP432开发板手册/slau597f)37页原理图

可以看到按下后被拉低为低电平,所以我们应该把引脚配置为上拉输入
2.代码
key.h
#ifndef __KEY_H
#define __KEY_H
#include "driverlib.h"
#define KEY1 BITBAND_PERI(P1IN, 1) //读取按键1
#define KEY2 BITBAND_PERI(P1IN, 4) //读取按键2
#define KEY1_PRES 1 //KEY0按下
#define KEY2_PRES 2 //KEY1按下
void KEY_Init(void);//IO初始化
uint8_t KEY_Scan(uint8_t); //按键扫描函数
#endif
key.c
#include "driverlib.h"
#include "key.h"
//按键初始化函数
void KEY_Init(void) //IO初始化
{
GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN1 | GPIO_PIN4);
}
//按键处理函数
//返回按键值
//mode:0,不支持连续按;1,支持连续按;
//0,没有任何按键按下
//1,KEY0按下
//2,KEY1按下
//3,KEY3按下 WK_UP
//注意此函数有响应优先级,KEY0>KEY1>KEY_UP!!
uint8_t KEY_Scan(uint8_t mode)
{
uint16_t i;
static uint8_t key_up = 1; //按键按松开标志
if (mode)
key_up = 1; //支持连按
if (key_up && (KEY2 == 0 || KEY1 == 0))
{
for (i = 0; i < 5000; i++)
; //去抖动
key_up = 0;
if (KEY1 == 0)
return KEY1_PRES;
else if (KEY2 == 0)
return KEY2_PRES;
}
else if (KEY2 == 1 && KEY1 == 1)
key_up = 1;
return 0;// 无按键按下
}
main.c
#include "driverlib.h"
/* Standard Includes */
#include <stdint.h>
#include <stdbool.h>
#include "led.h"
#include "key.h"
int main(void)
{
uint8_t key;
/* Stop Watchdog */
MAP_WDT_A_holdTimer();
LED_Init();
KEY_Init();
while (1)
{
key = KEY_Scan(0);//不支持连按
if (key == KEY1_PRES)
LED_RED_On();//打开LED1
else if (key == KEY2_PRES)
LED_RED_Off();//关闭LED1
}
}
三、外部中断
MSP432P401R并不是每一个IO口都可以中断,必须参考msp432p401r第17页

port interrupt:端口中断
只有P1到P7所以IO口可以做外部中断
(一)库函数
1.gpio.h
- (1)开启外部中断
GPIO_enableInterrupt(GPIO_PORT_Px,GPIO_PINx);
- 配置触发方式
GPIO_interruptEdgeSelect(GPIO_PORT_P1,GPIO_PIN4,Edge);
Edge有效值:
GPIO_HIGH_TO_LOW_TRANSITION//下降沿(从高到低)
GPIO_LOW_TO_HIGH_TRANSITION//上升沿(从低到高)
- 获取GPIO中断状态
GPIO_getEnabledInterruptStatus(GPIO_PORT_Px);
- 清除GPIO中断标志位
GPIO_clearInterruptFlag(GPIO_PORT_Px,GPIO_PINx);
配合使用
status=GPIO_getEnabledInterruptStatus(GPIO_PORT_Px);
GPIO_clearInterruptFlag(GPIO_PORT_Px,status);
2.interrupt.h
- 开启总中断
Interrupt_enableMaster(void);
- 开启端口中断
Interrupt_enableInterrupt(interruptNumber);
interruptNumber有效值:
INT_PORT1
INT_PORT2
INT_PORT3
INT_PORT4
INT_PORT5
INT_PORT6
(二)一般配置步骤
-
配置GPIO输入
GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN1); //P1.1 GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN4); //P1.4 -
清除中断标志位
GPIO_clearInterruptFlag(GPIO_PORT_P1, GPIO_PIN1); GPIO_clearInterruptFlag(GPIO_PORT_P1, GPIO_PIN4); -
配置触发方式
GPIO_interruptEdgeSelect(GPIO_PORT_P1, GPIO_PIN1, GPIO_HIGH_TO_LOW_TRANSITION); GPIO_interruptEdgeSelect(GPIO_PORT_P1, GPIO_PIN4, GPIO_HIGH_TO_LOW_TRANSITION); -
开启外部中断
GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN1); GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN4); -
开启端口中断
Interrupt_enableInterrupt(INT_PORT1); -
开启总中断
Interrupt_enableMaster(); -
编写中断服务函数
void PORT1_IRQHandler(void)
{
uint16_t status;
status = GPIO_getEnabledInterruptStatus(GPIO_PORT_P1);
GPIO_clearInterruptFlag(GPIO_PORT_P1, status);
delay_ms(10);//按键消抖
if (status & GPIO_PIN1) //对应P1.1
{
if (KEY1 == 0)
{
LED_RED_On(); //点亮红灯
}
}
if (status & GPIO_PIN4) //对应P1.4
{
if (KEY2 == 0)
{
LED_RED_Tog();//翻转红灯
}
}
}
(三)中断优先级管理
详情见技术手册(slau356)82页
-
等级越低,中断优先级越高,也就是说等级0的优先级最高。
-
支持动态调整优先级
-
将优先级分为组优先级和子优先级,组优先级高的是可以打断组优先级低的,组优先级一样时就不会被打断,如果发生了两个组优先级一样的中断,则子优先级高的会先执行,另一个挂起
-
注意,这里的子优先级是硬件优先级,是已经设置好了的,不能更改
详情见msp432p401r第117页,中断号(NVIC INTERRUPT INPUT)越小,子优先级越高
例子:
系统有两个中断,中断A和中断B,中断号分别为1和2。
当不进行中断优先级配置时,组优先级一致,中断号即为中断优先级,中断号小的中断优先级高,所以中断优先级为A>B。假如此时系统正在执行中断B,而中断A发生了,系统会如何处理呢?因为它们组优先级一样,故中断A不能打断中断B,系统会先挂起中断A,待中断B执行完后,再执行中断A;
倘若将中断A的组优先级设置为1,中断B的组优先级设置为2,此时系统正在执行中断B,而中断A发生了,系统会如何处理呢?因为组优先级小的优先级高,所以中断优先级是A>B,故系统打断中断B,执行中断A,待中断A执行完后,再继续执行中断B。
总结:
- 组优先级高的能打断组优先级低的
- 在组优先级一样的情况下,子优先级高的不能打断子优先级低的
1.代码
- 设置组优先级
Interrupt_setPriority(interruptNuber,level);
level:x<<5,x∈[0,7]
只使用高3位,配置时左移5位。
(四)外部中断实验
exti.h
#ifndef __EXTI_H
#define __EXIT_H
#include "driverlib.h"
void EXTIX_Init(void);//外部中断初始化
#endif
exti.c
#include "driverlib.h"
#include "exti.h"
void EXTIX_Init(void)
{
//1.配置GPIO输入
GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN1); //P1.1
GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN4); //P1.4
//2.清除中断标志位
GPIO_clearInterruptFlag(GPIO_PORT_P1, GPIO_PIN1);
GPIO_clearInterruptFlag(GPIO_PORT_P1, GPIO_PIN4);
//3.配置触发方式
GPIO_interruptEdgeSelect(GPIO_PORT_P1, GPIO_PIN1, GPIO_HIGH_TO_LOW_TRANSITION);
GPIO_interruptEdgeSelect(GPIO_PORT_P1, GPIO_PIN4, GPIO_HIGH_TO_LOW_TRANSITION);
//4.5 配置组优先级
Interrupt_setPriority(INT_PORT1, 1 << 5);
Interrupt_setPriority(INT_PORT1, 2 << 5);
//4.开启外部中断
GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN1);
GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN4);
//5.开启端口中断
Interrupt_enableInterrupt(INT_PORT1);
//6.开启总中断
Interrupt_enableMaster();
}
main.h
#include "driverlib.h"
/* Standard Includes */
#include <stdint.h>
#include <stdbool.h>
#include "led.h"
#include "key.h"
#include "delay.h"
#include "exti.h"
int main(void)
{
/* Stop Watchdog */
MAP_WDT_A_holdTimer();
LED_Init();
EXTIX_Init();
delay_init();
while (1)
{
}
}
//7.编写中断服务函数
void PORT1_IRQHandler(void)
{
uint16_t status;
status = GPIO_getEnabledInterruptStatus(GPIO_PORT_P1);
GPIO_clearInterruptFlag(GPIO_PORT_P1, status);
delay_ms(10);//按键消抖
if (status & GPIO_PIN1) //对应P1.1
{
if (KEY1 == 0)
{
LED_RED_On(); //点亮红灯
}
}
if (status & GPIO_PIN4) //对应P1.4
{
if (KEY2 == 0)
{
LED_RED_Tog();//翻转红灯
}
}
}
四、串口收发
(一)MSP432P401R串口资源+

详见msp432p401r第6页
A0的串口是通过跳线帽连接到调试器上的

开发板手册(slau597f)第38页
(二)UART模式的特性
- 7/8个数据位、1个奇/偶/无奇偶效验位
- 独立的发送和接收移位寄存器
- 独立的发送和接收缓冲寄存器
- LSP优先/MSB优先的数据发送和接收
- 为多处理器系统内置空闲线和地址位通信协议
- 支持分数波特率的可编程调制波特率
- 用于错误检测和抑制的状态标志
- 针对地址检测的状态标志
- 针对接收、发送,起始位接收和发送完成的独立中断能力
数据手册(slau356)第904页
(三)库函数
1.uart.h
-
初始化串口函数
UART_initModule(EUSCI_Ax_BASE, &uartConfig); -
使能串口模块
UART_enableModule(EUSCI_Ax_BASE); -
开启串口相关中断
UART_enableInterrupt(EUSCI_Ax_BASE, EUSCI_x_INTERRUPT); -
获取数据
UART_receiveData(EUSCI_Ax_BASE); -
发送数据
UART_transmitData(EUSCI_Ax_BASE,Data_8bit); -
开启串口端口中断
Interrupt_enableInterrupt(INT_EUSCIAx); -
开启总中断
Interrupt_enableMaster(void);
(四)一般配置步骤
- 配置时钟
- 配置GPIO复用
- 配置结构体
- 初始化串口
- 开启串口
- 开启串口相关中断
- 开启串口端口中断
- 开启总中断
- 编写UART ISR
(五)代码
usart.h
/****************************************************/
// MSP432P401R
// 串口配置
// Bilibili:m-RNA
// E-mail:m-RNA@qq.com
/****************************************************/
/****************** 版本更新说明 *****************
*
* CCS支持printf
* Keil支持标准C库跟微库
* 用Keil开发终于可以不开微库啦
*
* ? 需要注意:
* ①使用标准C库时,将无法使用scanf。
* 如果需要使用scanf时,请使用微库 MicroLIB
* ①低频时钟频率下,高波特率使得传输时误差过大,
* 比如35768Hz下19200波特率,
* 会使得传输出错,这时可以尝试降低波特率。
* ②baudrate_calculate的问题请去文件内查看。
*
* **************************************************
*
* ? v3.2 2021/10/28
* 简化对CCS支持的printf代码
*
* ? v3.1 2021/10/18
* 添加对CCS的printf支持
*
* ? v3.0 2021/10/15
* 此版本支持使用 标准C库
* 文件正式改名为与正点原子同名的
* usart.c 和 usart.h,方便移植
* 仅支持Keil平台开发
*
* ? v2.1 2021/8/27
* 添加支持固件库v3_21_00_05
* 仅支持 MicroLIB 微库、Keil平台开发
*
* ? v2.0 2021/8/25
* uart_init增添了波特率传入参数,可直接配置波特率。
* 计算UART的代码单独打包为名为
* baudrate_calculate的c文件和h文件
* 仅支持 MicroLIB 微库、Keil平台开发
*
* ? v1.0 2021/7/17
* 仅支持固件库v3_40_01_02
* 配置了SMCLK 48MHz 波特率 115200的初始化代码,
* 对接标准输入输出库,使其能使用printf、scanf函数
* 仅支持 MicroLIB 微库、Keil平台开发
*
****************************************************/
#ifndef __USART_H
#define __USART_H
#include "driverlib.h"
#include "stdio.h" //1.61328125kb
#ifdef __TI_COMPILER_VERSION__
//CCS平台
#include "stdarg.h"
#include "string.h"
#define USART0_MAX_SEND_LEN 600 //最大发送缓存字节数
int printf(const char *str, ...);
#endif
void uart_init(uint32_t baudRate);
#endif
usart.c
/****************************************************/
// MSP432P401R
// 串口配置
// Bilibili:m-RNA
// E-mail:m-RNA@qq.com
/****************************************************/
/****************** 版本更新说明 *****************
*
* CCS支持printf
* Keil支持标准C库跟微库
* 用Keil开发终于可以不开微库啦
*
* ? 需要注意:
* ①使用标准C库时,将无法使用scanf。
* 如果需要使用scanf时,请使用微库 MicroLIB
* ①低频时钟频率下,高波特率使得传输时误差过大,
* 比如35768Hz下19200波特率,
* 会使得传输出错,这时可以尝试降低波特率。
* ②baudrate_calculate的问题请去文件内查看。
*
* **************************************************
*
* ? v3.2 2021/10/28
* 简化对CCS支持的printf代码
*
* ? v3.1 2021/10/18
* 添加对CCS的printf支持
*
* ? v3.0 2021/10/15
* 此版本支持使用 标准C库
* 文件正式改名为与正点原子同名的
* usart.c 和 usart.h,方便移植
* 仅支持Keil平台开发
*
* ? v2.1 2021/8/27
* 添加支持固件库v3_21_00_05
* 仅支持 MicroLIB 微库、Keil平台开发
*
* ? v2.0 2021/8/25
* uart_init增添了波特率传入参数,可直接配置波特率。
* 计算UART的代码单独打包为名为
* baudrate_calculate的c文件和h文件
* 仅支持 MicroLIB 微库、Keil平台开发
*
* ? v1.0 2021/7/17
* 仅支持固件库v3_40_01_02
* 配置了SMCLK 48MHz 波特率 115200的初始化代码,
* 对接标准输入输出库,使其能使用printf、scanf函数
* 仅支持 MicroLIB 微库、Keil平台开发
*
****************************************************/
#include "usart.h"
#include "baudrate_calculate.h"
#ifdef __TI_COMPILER_VERSION__
//CCS平台
uint8_t USART0_TX_BUF[USART0_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
int printf(const char *str, ...)
{
uint16_t i,j;
va_list ap;
va_start(ap,str);
vsprintf((char*)USART0_TX_BUF,str,ap);
va_end(ap);
i=strlen((const char*)USART0_TX_BUF); //此次发送数据的长度
for(j=0;j<i;j++) //循环发送数据
{
//while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
UART_transmitData(EUSCI_A0_BASE, USART0_TX_BUF[j]);
}
return 0;
}
/***************** 函数说明 *****************
*
* 函数:int printf(const char *str, ...);
* 源码来自@正点原子
* 稍作改动适配CCS工程,在此也表感谢正点原子。
*
***************** 说明结束 *****************/
#else
//Keil支持标准C库跟微库
//预编译
//if 1 使用标准C库 如果报错就使用微库
//if 0 使用微库 得去勾选魔术棒里的 Use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
#else
int fgetc(FILE *f)
{
while (EUSCI_A_UART_RECEIVE_INTERRUPT_FLAG !=
UART_getInterruptStatus(EUSCI_A0_BASE, EUSCI_A_UART_RECEIVE_INTERRUPT_FLAG))
;
return UART_receiveData(EUSCI_A0_BASE);
}
#endif
int fputc(int ch, FILE *f)
{
UART_transmitData(EUSCI_A0_BASE, ch & 0xFF);
return ch;
}
/***************** 函数说明 *****************
*
* 以上两条对接标准输入输出库的函数:
* int fputc(int ch, FILE *f);
* int fgetc(FILE *f);
* 源码为BiliBili平台UP主 “CloudBoyStudio” 编写
* 本人RNA,不是作者
* 在此也表感谢
*
***************** 说明结束 *****************/
#endif
void uart_init(uint32_t baudRate)
{
#ifdef EUSCI_A_UART_7_BIT_LEN
//固件库v3_40_01_02
//默认SMCLK 48MHz 比特率 115200
const eUSCI_UART_ConfigV1 uartConfig =
{
EUSCI_A_UART_CLOCKSOURCE_SMCLK, // SMCLK Clock Source
26, // BRDIV = 26
0, // UCxBRF = 0
111, // UCxBRS = 111
EUSCI_A_UART_NO_PARITY, // No Parity
EUSCI_A_UART_LSB_FIRST, // MSB First
EUSCI_A_UART_ONE_STOP_BIT, // One stop bit
EUSCI_A_UART_MODE, // UART mode
EUSCI_A_UART_OVERSAMPLING_BAUDRATE_GENERATION, // Oversampling
EUSCI_A_UART_8_BIT_LEN // 8 bit data length
};
eusci_calcBaudDividers((eUSCI_UART_ConfigV1 *)&uartConfig, baudRate); //配置波特率
#else
//固件库v3_21_00_05
//默认SMCLK 48MHz 比特率 115200
const eUSCI_UART_Config uartConfig =
{
EUSCI_A_UART_CLOCKSOURCE_SMCLK, // SMCLK Clock Source
26, // BRDIV = 26
0, // UCxBRF = 0
111, // UCxBRS = 111
EUSCI_A_UART_NO_PARITY, // No Parity
EUSCI_A_UART_LSB_FIRST, // MSB First
EUSCI_A_UART_ONE_STOP_BIT, // One stop bit
EUSCI_A_UART_MODE, // UART mode
EUSCI_A_UART_OVERSAMPLING_BAUDRATE_GENERATION, // Oversampling
};
eusci_calcBaudDividers((eUSCI_UART_Config *)&uartConfig, baudRate); //配置波特率
#endif
MAP_GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3, GPIO_PRIMARY_MODULE_FUNCTION);//2.配置GPIO复用
MAP_UART_initModule(EUSCI_A0_BASE, &uartConfig);//3.初始化串口
MAP_UART_enableModule(EUSCI_A0_BASE);//4.开启串口模块
UART_enableInterrupt(EUSCI_A0_BASE, EUSCI_A_UART_RECEIVE_INTERRUPT);//5.开启串口相关中断
Interrupt_enableInterrupt(INT_EUSCIA0);//6.开启串口端口中断
Interrupt_enableMaster();//7.开启总中断
}
//8.编写UART ISR
void EUSCIA0_IRQHandler(void)
{
uint32_t status = UART_getEnabledInterruptStatus(EUSCI_A0_BASE);
if(status & EUSCI_A_UART_RECEIVE_INTERRUPT_FLAG) //接收中断
{
UART_transmitData(EUSCI_A0_BASE, MAP_UART_receiveData(EUSCI_A0_BASE)); //发送数据
}
}
sysinit.h
/* --COPYRIGHT--,BSD
* Copyright (c) 2017, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
#ifndef __SYSCTL_H__
#define __SYSCTL_H__
#include <stdint.h>
#include "driverlib.h"
/* Define to ensure that our current MSP432 has the SYSCTL module. This
definition is included in the device specific header file */
#ifdef __MCU_HAS_SYSCTL__
//*****************************************************************************
//
//! \addtogroup sysctl_api
//! @{
//
//*****************************************************************************
//*****************************************************************************
//
// If building with a C++ compiler, make all of the definitions in this header
// have a C binding.
//
//*****************************************************************************
#ifdef __cplusplus
extern "C"
{
#endif
//*****************************************************************************
//
// Control specific variables
//
//*****************************************************************************
#define SYSCTL_SRAM_BANK7 SYSCTL_SRAM_BANKEN_BNK7_EN
#define SYSCTL_SRAM_BANK6 SYSCTL_SRAM_BANKEN_BNK6_EN
#define SYSCTL_SRAM_BANK5 SYSCTL_SRAM_BANKEN_BNK5_EN
#define SYSCTL_SRAM_BANK4 SYSCTL_SRAM_BANKEN_BNK4_EN
#define SYSCTL_SRAM_BANK3 SYSCTL_SRAM_BANKEN_BNK3_EN
#define SYSCTL_SRAM_BANK2 SYSCTL_SRAM_BANKEN_BNK2_EN
#define SYSCTL_SRAM_BANK1 SYSCTL_SRAM_BANKEN_BNK1_EN
#define SYSCTL_HARD_RESET 1
#define SYSCTL_SOFT_RESET 0
#define SYSCTL_PERIPH_DMA SYSCTL_PERIHALT_CTL_HALT_DMA
#define SYSCTL_PERIPH_WDT SYSCTL_PERIHALT_CTL_HALT_WDT
#define SYSCTL_PERIPH_ADC SYSCTL_PERIHALT_CTL_HALT_ADC
#define SYSCTL_PERIPH_EUSCIB3 SYSCTL_PERIHALT_CTL_HALT_EUB3
#define SYSCTL_PERIPH_EUSCIB2 SYSCTL_PERIHALT_CTL_HALT_EUB2
#define SYSCTL_PERIPH_EUSCIB1 SYSCTL_PERIHALT_CTL_HALT_EUB1
#define SYSCTL_PERIPH_EUSCIB0 SYSCTL_PERIHALT_CTL_HALT_EUB0
#define SYSCTL_PERIPH_EUSCIA3 SYSCTL_PERIHALT_CTL_HALT_EUA3
#define SYSCTL_PERIPH_EUSCIA2 SYSCTL_PERIHALT_CTL_HALT_EUA2
#define SYSCTL_PERIPH_EUSCIA1 SYSCTL_PERIHALT_CTL_HALT_EUA1
#define SYSCTL_PERIPH_EUSCIA0 SYSCTL_PERIHALT_CTL_HALT_EUA0
#define SYSCTL_PERIPH_TIMER32_0_MODULE SYSCTL_PERIHALT_CTL_HALT_T32_0
#define SYSCTL_PERIPH_TIMER16_3 SYSCTL_PERIHALT_CTL_HALT_T16_3
#define SYSCTL_PERIPH_TIMER16_2 SYSCTL_PERIHALT_CTL_HALT_T16_2
#define SYSCTL_PERIPH_TIMER16_1 SYSCTL_PERIHALT_CTL_HALT_T16_1
#define SYSCTL_PERIPH_TIMER16_0 SYSCTL_PERIHALT_CTL_HALT_T16_0
#define SYSCTL_NMIPIN_SRC SYSCTL_NMI_CTLSTAT_PIN_SRC
#define SYSCTL_PCM_SRC SYSCTL_NMI_CTLSTAT_PCM_SRC
#define SYSCTL_PSS_SRC SYSCTL_NMI_CTLSTAT_PSS_SRC
#define SYSCTL_CS_SRC SYSCTL_NMI_CTLSTAT_CS_SRC
#define SYSCTL_REBOOT_KEY 0x6900
#define SYSCTL_1_2V_REF (uint32_t)&TLV->ADC14_REF1P2V_TS30C - (uint32_t)TLV_BASE
#define SYSCTL_1_45V_REF (uint32_t)&TLV->ADC14_REF1P45V_TS30C - (uint32_t)TLV_BASE
#define SYSCTL_2_5V_REF (uint32_t)&TLV->ADC14_REF2P5V_TS30C - (uint32_t)TLV_BASE
#define SYSCTL_85_DEGREES_C 4
#define SYSCTL_30_DEGREES_C 0
#define TLV_START 0x00201004
#define TLV_TAG_RESERVED1 1
#define TLV_TAG_RESERVED2 2
#define TLV_TAG_CS 3
#define TLV_TAG_FLASHCTL 4
#define TLV_TAG_ADC14 5
#define TLV_TAG_RESERVED6 6
#define TLV_TAG_RESERVED7 7
#define TLV_TAG_REF 8
#define TLV_TAG_RESERVED9 9
#define TLV_TAG_RESERVED10 10
#define TLV_TAG_DEVINFO 11
#define TLV_TAG_DIEREC 12
#define TLV_TAG_RANDNUM 13
#define TLV_TAG_RESERVED14 14
#define TLV_TAG_BSL 15
#define TLV_TAGEND 0x0BD0E11D
//*****************************************************************************
//
// Structures for TLV definitions
//
//*****************************************************************************
typedef struct
{
uint32_t maxProgramPulses;
uint32_t maxErasePulses;
} SysCtl_FlashTLV_Info;
typedef struct
{
uint32_t rDCOIR_FCAL_RSEL04;
uint32_t rDCOIR_FCAL_RSEL5;
uint32_t rDCOIR_MAXPOSTUNE_RSEL04;
uint32_t rDCOIR_MAXNEGTUNE_RSEL04;
uint32_t rDCOIR_MAXPOSTUNE_RSEL5;
uint32_t rDCOIR_MAXNEGTUNE_RSEL5;
uint32_t rDCOIR_CONSTK_RSEL04;
uint32_t rDCOIR_CONSTK_RSEL5;
uint32_t rDCOER_FCAL_RSEL04;
uint32_t rDCOER_FCAL_RSEL5;
uint32_t rDCOER_MAXPOSTUNE_RSEL04;
uint32_t rDCOER_MAXNEGTUNE_RSEL04;
uint32_t rDCOER_MAXPOSTUNE_RSEL5;
uint32_t rDCOER_MAXNEGTUNE_RSEL5;
uint32_t rDCOER_CONSTK_RSEL04;
uint32_t rDCOER_CONSTK_RSEL5;
} SysCtl_CSCalTLV_Info;
//*****************************************************************************
//
// Prototypes for the APIs.
//
//*****************************************************************************
//*****************************************************************************
//
//! Gets the size of the SRAM.
//!
//! \return The total number of bytes of SRAM.
//
//*****************************************************************************
extern uint_least32_t SysCtl_getSRAMSize(void);
//*****************************************************************************
//
//! Gets the size of the flash.
//!
//! \return The total number of bytes of flash.
//
//*****************************************************************************
extern uint_least32_t SysCtl_getFlashSize(void);
//*****************************************************************************
//
//! Reboots the device and causes the device to re-initialize itself.
//!
//! \return This function does not return.
//
//*****************************************************************************
extern void SysCtl_rebootDevice(void);
//*****************************************************************************
//
//! The TLV structure uses a tag or base address to identify segments of the
//! table where information is stored. Some examples of TLV tags are Peripheral
//! Descriptor, Interrupts, Info Block and Die Record. This function retrieves
//! the value of a tag and the length of the tag.
//!
//! \param tag represents the tag for which the information needs to be
//! retrieved.
//! Valid values are:
//! - \b TLV_TAG_RESERVED1
//! - \b TLV_TAG_RESERVED2
//! - \b TLV_TAG_CS
//! - \b TLV_TAG_FLASHCTL
//! - \b TLV_TAG_ADC14
//! - \b TLV_TAG_RESERVED6
//! - \b TLV_TAG_RESERVED7
//! - \b TLV_TAG_REF
//! - \b TLV_TAG_RESERVED9
//! - \b TLV_TAG_RESERVED10
//! - \b TLV_TAG_DEVINFO
//! - \b TLV_TAG_DIEREC
//! - \b TLV_TAG_RANDNUM
//! - \b TLV_TAG_RESERVED14
//! \param instance In some cases a specific tag may have more than one
//! instance. For example there may be multiple instances of timer
//! calibration data present under a single Timer Cal tag. This variable
//! specifies the instance for which information is to be retrieved (0,
//! 1, etc.). When only one instance exists; 0 is passed.
//! \param length Acts as a return through indirect reference. The function
//! retrieves the value of the TLV tag length. This value is pointed to
//! by *length and can be used by the application level once the
//! function is called. If the specified tag is not found then the
//! pointer is null 0.
//! \param data_address acts as a return through indirect reference. Once the
//! function is called data_address points to the pointer that holds the
//! value retrieved from the specified TLV tag. If the specified tag is
//! not found then the pointer is null 0.
//!
//! \return None
//
//*****************************************************************************
extern void SysCtl_getTLVInfo(uint_fast8_t tag, uint_fast8_t instance,
uint_fast8_t *length, uint32_t **data_address);
//*****************************************************************************
//
//! Enables a set of banks in the SRAM. This can be used to optimize power
//! consumption when every SRAM bank isn't needed. It is important to note
//! that when a higher bank is enabled, all of the SRAM banks below that bank
//! are also enabled. For example, if the user enables SYSCTL_SRAM_BANK7,
//! the banks SYSCTL_SRAM_BANK1 through SYSCTL_SRAM_BANK7 will be enabled
//! (SRAM_BANK0 is reserved and always enabled).
//!
//! \param sramBank The SRAM bank tier to enable.
//! Must be only one of the following values:
//! - \b SYSCTL_SRAM_BANK1,
//! - \b SYSCTL_SRAM_BANK2,
//! - \b SYSCTL_SRAM_BANK3,
//! - \b SYSCTL_SRAM_BANK4,
//! - \b SYSCTL_SRAM_BANK5,
//! - \b SYSCTL_SRAM_BANK6,
//! - \b SYSCTL_SRAM_BANK7
//!
//! \note \b SYSCTL_SRAM_BANK0 is reserved and always enabled.
//!
//! \return None.
//
//*****************************************************************************
extern void SysCtl_enableSRAMBank(uint_fast8_t sramBank);
//*****************************************************************************
//
//! Disables a set of banks in the SRAM. This can be used to optimize power
//! consumption when every SRAM bank isn't needed. It is important to note
//! that when a higher bank is disabled, all of the SRAM banks above that bank
//! are also disabled. For example, if the user disables SYSCTL_SRAM_BANK5,
//! the banks SYSCTL_SRAM_BANK6 through SYSCTL_SRAM_BANK7 will be disabled.
//!
//! \param sramBank The SRAM bank tier to disable.
//! Must be only one of the following values:
//! - \b SYSCTL_SRAM_BANK1,
//! - \b SYSCTL_SRAM_BANK2,
//! - \b SYSCTL_SRAM_BANK3,
//! - \b SYSCTL_SRAM_BANK4,
//! - \b SYSCTL_SRAM_BANK5,
//! - \b SYSCTL_SRAM_BANK6,
//! - \b SYSCTL_SRAM_BANK7
//!
//! \note \b SYSCTL_SRAM_BANK0 is reserved and always enabled.
//!
//! \return None.
//
//*****************************************************************************
extern void SysCtl_disableSRAMBank(uint_fast8_t sramBank);
//*****************************************************************************
//
//! Enables retention of the specified SRAM bank register when the device goes
//! into LPM3 mode. When the system is placed in LPM3 mode, the SRAM
//! banks specified with this function will be placed into retention mode. By
//! default, retention of every SRAM bank except SYSCTL_SRAM_BANK0 (reserved) is
//! disabled. Retention of individual banks can be set without the restrictions
//! of the enable/disable functions.
//!
//! \param sramBank The SRAM banks to enable retention
//! Can be a bitwise OR of the following values:
//! - \b SYSCTL_SRAM_BANK1,
//! - \b SYSCTL_SRAM_BANK2,
//! - \b SYSCTL_SRAM_BANK3,
//! - \b SYSCTL_SRAM_BANK4,
//! - \b SYSCTL_SRAM_BANK5,
//! - \b SYSCTL_SRAM_BANK6,
//! - \b SYSCTL_SRAM_BANK7
//! \note \b SYSCTL_SRAM_BANK0 is reserved and retention is always enabled.
//!
//!
//! \return None.
//
//*****************************************************************************
extern void SysCtl_enableSRAMBankRetention(uint_fast8_t sramBank);
//*****************************************************************************
//
//! Disables retention of the specified SRAM bank register when the device goes
//! into LPM3 mode. When the system is placed in LPM3 mode, the SRAM
//! banks specified with this function will not be placed into retention mode.
//! By default, retention of every SRAM bank except SYSCTL_SRAM_BANK0 (reserved)
//! is disabled. Retention of individual banks can be set without the
//! restrictions of the enable/disable SRAM bank functions.
//!
//! \param sramBank The SRAM banks to disable retention
//! Can be a bitwise OR of the following values:
//! - \b SYSCTL_SRAM_BANK1,
//! - \b SYSCTL_SRAM_BANK2,
//! - \b SYSCTL_SRAM_BANK3,
//! - \b SYSCTL_SRAM_BANK4,
//! - \b SYSCTL_SRAM_BANK5,
//! - \b SYSCTL_SRAM_BANK6,
//! - \b SYSCTL_SRAM_BANK7
//! \note \b SYSCTL_SRAM_BANK0 is reserved and retention is always enabled.
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_disableSRAMBankRetention(uint_fast8_t sramBank);
//*****************************************************************************
//
//! Makes it so that the provided peripherals will either halt execution after
//! a CPU HALT. Parameters in this function can be combined to account for
//! multiple peripherals. By default, all peripherals keep running after a
//! CPU HALT.
//!
//! \param devices The peripherals to continue running after a CPU HALT
//! This can be a bitwise OR of the following values:
//! - \b SYSCTL_PERIPH_DMA,
//! - \b SYSCTL_PERIPH_WDT,
//! - \b SYSCTL_PERIPH_ADC,
//! - \b SYSCTL_PERIPH_EUSCIB3,
//! - \b SYSCTL_PERIPH_EUSCIB2,
//! - \b SYSCTL_PERIPH_EUSCIB1
//! - \b SYSCTL_PERIPH_EUSCIB0,
//! - \b SYSCTL_PERIPH_EUSCIA3,
//! - \b SYSCTL_PERIPH_EUSCIA2
//! - \b SYSCTL_PERIPH_EUSCIA1,
//! - \b SYSCTL_PERIPH_EUSCIA0,
//! - \b SYSCTL_PERIPH_TIMER32_0_MODULE,
//! - \b SYSCTL_PERIPH_TIMER16_3,
//! - \b SYSCTL_PERIPH_TIMER16_2,
//! - \b SYSCTL_PERIPH_TIMER16_1,
//! - \b SYSCTL_PERIPH_TIMER16_0
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_enablePeripheralAtCPUHalt(uint_fast16_t devices);
//*****************************************************************************
//
//! Makes it so that the provided peripherals will either halt execution after
//! a CPU HALT. Parameters in this function can be combined to account for
//! multiple peripherals. By default, all peripherals keep running after a
//! CPU HALT.
//!
//! \param devices The peripherals to disable after a CPU HALT
//!
//! The \e devices parameter can be a bitwise OR of the following values:
//! This can be a bitwise OR of the following values:
//! - \b SYSCTL_PERIPH_DMA,
//! - \b SYSCTL_PERIPH_WDT,
//! - \b SYSCTL_PERIPH_ADC,
//! - \b SYSCTL_PERIPH_EUSCIB3,
//! - \b SYSCTL_PERIPH_EUSCIB2,
//! - \b SYSCTL_PERIPH_EUSCIB1
//! - \b SYSCTL_PERIPH_EUSCIB0,
//! - \b SYSCTL_PERIPH_EUSCIA3,
//! - \b SYSCTL_PERIPH_EUSCIA2
//! - \b SYSCTL_PERIPH_EUSCIA1,
//! - \b SYSCTL_PERIPH_EUSCIA0,
//! - \b SYSCTL_PERIPH_TIMER32_0_MODULE,
//! - \b SYSCTL_PERIPH_TIMER16_3,
//! - \b SYSCTL_PERIPH_TIMER16_2,
//! - \b SYSCTL_PERIPH_TIMER16_1,
//! - \b SYSCTL_PERIPH_TIMER16_0
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_disablePeripheralAtCPUHalt(uint_fast16_t devices);
//*****************************************************************************
//
//! Sets the type of RESET that happens when a watchdog timeout occurs.
//!
//! \param resetType The type of reset to set
//!
//! The \e resetType parameter must be only one of the following values:
//! - \b SYSCTL_HARD_RESET,
//! - \b SYSCTL_SOFT_RESET
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_setWDTTimeoutResetType(uint_fast8_t resetType);
//*****************************************************************************
//
//! Sets the type of RESET that happens when a watchdog password violation
//! occurs.
//!
//! \param resetType The type of reset to set
//!
//! The \e resetType parameter must be only one of the following values:
//! - \b SYSCTL_HARD_RESET,
//! - \b SYSCTL_SOFT_RESET
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_setWDTPasswordViolationResetType(uint_fast8_t resetType);
//*****************************************************************************
//
//! Disables NMIs for the provided modules. When disabled, a NMI flag will not
//! occur when a fault condition comes from the corresponding modules.
//!
//! \param flags The NMI sources to disable
//! Can be a bitwise OR of the following parameters:
//! - \b SYSCTL_NMIPIN_SRC,
//! - \b SYSCTL_PCM_SRC,
//! - \b SYSCTL_PSS_SRC,
//! - \b SYSCTL_CS_SRC
//!
//
//*****************************************************************************
extern void SysCtl_disableNMISource(uint_fast8_t flags);
//*****************************************************************************
//
//! Enables NMIs for the provided modules. When enabled, a NMI flag will
//! occur when a fault condition comes from the corresponding modules.
//!
//! \param flags The NMI sources to enable
//! Can be a bitwise OR of the following parameters:
//! - \b SYSCTL_NMIPIN_SRC,
//! - \b SYSCTL_PCM_SRC,
//! - \b SYSCTL_PSS_SRC,
//! - \b SYSCTL_CS_SRC
//!
//
//*****************************************************************************
extern void SysCtl_enableNMISource(uint_fast8_t flags);
//*****************************************************************************
//
//! Returns the current sources of NMIs that are enabled
//!
//! \return Bitwise OR of NMI flags that are enabled
//
//*****************************************************************************
extern uint_fast8_t SysCtl_getNMISourceStatus(void);
//*****************************************************************************
//
//! Enables glitch suppression on the reset pin of the device. Refer to the
//! device data sheet for specific information about glitch suppression
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_enableGlitchFilter(void);
//*****************************************************************************
//
//! Disables glitch suppression on the reset pin of the device. Refer to the
//! device data sheet for specific information about glitch suppression
//!
//! \return None.
//
//
//*****************************************************************************
extern void SysCtl_disableGlitchFilter(void);
//*****************************************************************************
//
//! Retrieves the calibration constant of the temperature sensor to be used
//! in temperature calculation.
//!
//! \param refVoltage Reference voltage being used.
//!
//! The \e refVoltage parameter must be only one of the following values:
//! - \b SYSCTL_1_2V_REF
//! - \b SYSCTL_1_45V_REF
//! - \b SYSCTL_2_5V_REF
//!
//! \param temperature is the calibration temperature that the user wants to be
//! returned.
//!
//! The \e temperature parameter must be only one of the following values:
//! - \b SYSCTL_30_DEGREES_C
//! - \b SYSCTL_85_DEGREES_C
//!
//! \return None.
//
//
//*****************************************************************************
extern uint_fast16_t SysCtl_getTempCalibrationConstant(uint32_t refVoltage,
uint32_t temperature);
//*****************************************************************************
//
// Mark the end of the C bindings section for C++ compilers.
//
//*****************************************************************************
#ifdef __cplusplus
}
#endif
//*****************************************************************************
//
// Close the Doxygen group.
//! @}
//
//*****************************************************************************
#endif /* __MCU_HAS_SYSCTL__ */
#endif // __SYSCTL_H__
sysinit.c
/****************************************************/
//MSP432P401R
//时钟配置
//Bilibili:m-RNA
//E-mail:m-RNA@qq.com
//创建日期:2021/8/11
/****************************************************/
#include "sysinit.h"
//High:48MHz Low:32768Hz
//MCLK=48MHz SMCLK=48MHz
void SysInit(void)
{
WDTCTL = WDTPW | WDTHOLD; // 停用看门狗
/* 第一步需要配置我们的时钟引脚,这里的高速时钟使用的是外部晶振*/
//低速时钟初始化比较慢
MAP_GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_PJ, GPIO_PIN3 | GPIO_PIN2, GPIO_PRIMARY_MODULE_FUNCTION); //High
MAP_GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_PJ, GPIO_PIN0 | GPIO_PIN1, GPIO_PRIMARY_MODULE_FUNCTION); //Low
CS_setExternalClockSourceFrequency(32768, 48000000);
/* Starting HFXT in non-bypass mode without a timeout. Before we start
* we have to change VCORE to 1 to support the 48MHz frequency */
MAP_PCM_setCoreVoltageLevel(PCM_VCORE1);
/* 更改闪存控制器使用的等待状态数用于读取操作。
当改变时钟的频率范围时,必须使用此函数以允许可读闪存
通俗来讲就是CPU跑太快了,Flash跟不上,让CPU等等它 */
MAP_FlashCtl_setWaitState(FLASH_BANK0, 1);
MAP_FlashCtl_setWaitState(FLASH_BANK1, 1);
CS_startHFXT(false); //这是晶体 需要驱动
CS_startLFXT(CS_LFXT_DRIVE3); //驱动等级3
MAP_CS_initClockSignal(CS_MCLK, CS_HFXTCLK_SELECT, CS_CLOCK_DIVIDER_1); //48MHz 16分频时,滴答延时可达到最长
MAP_CS_initClockSignal(CS_SMCLK, CS_HFXTCLK_SELECT, CS_CLOCK_DIVIDER_1); //48MHz
}
baudrate_calculate.h
/****************************************************/
// MSP432P401R
// 串口波特率计算
// Bilibili:m-RNA
// E-mail:m-RNA@qq.com
/****************************************************/
/****************************** 说明 ******************************
*
* 源码为TI官方编写,本人只是将JS程序移植到了C语言平台,仅作为学习使用。源码出处为:
* http://software-dl.ti.com/msp430/msp430_public_sw/mcu/msp430/MSP430BaudRateConverter/index.html
*
* ? 已知问题:
* 调试时发现某些情况下,C语言的小数的大小与JS的相差较大,
* 导致了算出的UCSx(即secondModReg)不一样,
* 这时如果出现不能准确传输时,请换一个波特率。
*
* ? 需要注意:
* 波特率不能大于时钟频率,否则会退出函数
*
* ***************************** 版本说明 ******************************
*
* ? v1.2 2021/8/29
* 注释掉了闪烁灯的代码
*
* ? v1.1 2021/8/27
* 添加支持固件库v3_21_00_05
*
* ? v1.0 2021/8/25
* 仅支持固件库v3_40_01_02
*
* ******************************* 结束 *******************************/
#ifndef __RNA_BAUDRATE_CALCULATE_H
#define __RNA_BAUDRATE_CALCULATE_H
#include "driverlib.h"
//错误指示灯宏定义 方便移植使用
//MSP432P401R 有两个红灯P1.0 P2.0
//#define WARN_LED_1_PORT GPIO_PORT_P1
//#define WARN_LED_2_PORT GPIO_PORT_P2
//#define WARN_LED_1_PIN GPIO_PIN0
//#define WARN_LED_2_PIN GPIO_PIN0
//#define WARN_LED_INIT MAP_GPIO_setAsOutputPin
//#define WARN_LED_ON MAP_GPIO_setOutputHighOnPin
//#define WARN_LED_OFF MAP_GPIO_setOutputLowOnPin
#ifdef EUSCI_A_UART_7_BIT_LEN
void eusci_calcBaudDividers(eUSCI_UART_ConfigV1 *uart_config, uint32_t baudRate); //固件库v3_40_01_02
#else
void eusci_calcBaudDividers(eUSCI_UART_Config *uart_config, uint32_t baudRate); //固件库v3_21_00_05
#endif
#endif
baudrate_calculate.c
/****************************************************/
// MSP432P401R
// 串口波特率计算
// Bilibili:m-RNA
// E-mail:m-RNA@qq.com
/****************************************************/
/****************************** 说明 ******************************
*
* 源码为TI官方编写,本人只是将JS程序移植到了C语言平台,仅作为学习使用。源码出处为:
* http://software-dl.ti.com/msp430/msp430_public_sw/mcu/msp430/MSP430BaudRateConverter/index.html
*
* ? 已知问题:
* 调试时发现某些情况下,C语言的小数的大小与JS的相差较大,
* 导致了算出的UCSx(即secondModReg)不一样,
* 这时如果出现不能准确传输时,请换一个波特率。
*
* ? 需要注意:
* 波特率不能大于时钟频率,否则会退出函数
*
* ***************************** 版本说明 ******************************
*
* ? v1.2 2021/8/29
* 注释掉了闪烁灯的代码
*
* ? v1.1 2021/8/27
* 添加支持固件库v3_21_00_05
*
* ? v1.0 2021/8/25
* 仅支持固件库v3_40_01_02
*
* ******************************* 结束 *******************************/
#include "baudrate_calculate.h"
//void uart_warning_led(void);
/*
* ======== bitPosition ========
* return 1(0) if the specified bit position in value is set(clear)
*/
bool bitPosition(uint16_t value, uint16_t position)
{
if ((value & (1 << position)))
return 1;
return 0;
}
/*
* ======== eusci_calcBaudDividers ========
* computes the eUSCI_UART register settings for a given clock and baud rate
*
* UCOS16: the oversampling bit (0 or 1)
* UCBRx: the Baud Rate Control Word
* UCFx: the First modulation stage select (UCBRFx)
* UCSx: the Second modulation stage select (UCBRSx)
* maxAbsError: the maximum TX error for the register setting above
*
* The first four field names match the names used in Table 18-5,
* "Recommended Settings for Typical Crystals and Baudrates", of the
* MSP430FR57xx Family User's Guide (SLAU272A).
*/
#ifdef EUSCI_A_UART_7_BIT_LEN
void eusci_calcBaudDividers(eUSCI_UART_ConfigV1 *uart_config, uint32_t baudRate) //固件库v3_40_01_02
#else
void eusci_calcBaudDividers(eUSCI_UART_Config *uart_config, uint32_t baudRate) //固件库v3_21_00_05
#endif
{
float maxAbsErrorInByte;
float minAbsError;
float error;
uint8_t ii;
uint16_t jj;
uint16_t NN;
uint32_t count;
uint32_t clockRate;
if (!uart_config || !baudRate) //传参错误 退出函数
{
//uart_warning_led(); //闪烁错误指示灯10次
return;
}
if (uart_config->selectClockSource == EUSCI_A_UART_CLOCKSOURCE_SMCLK)
clockRate = MAP_CS_getSMCLK();
else if (uart_config->selectClockSource == EUSCI_A_UART_CLOCKSOURCE_ACLK)
clockRate = MAP_CS_getACLK();
else
{
uart_config->selectClockSource = EUSCI_A_UART_CLOCKSOURCE_SMCLK;
clockRate = MAP_CS_getSMCLK();
}
if (baudRate > clockRate) //判断波特率是否大于时钟频率 是则退出函数
{
//uart_warning_led(); //闪烁错误指示灯10次
return;
}
//var result = {UCOS16 : 0, UCBRx : 0, UCFx : 0, UCSx : 0, maxAbsError : 0};
NN = (uint16_t)((float)clockRate / (float)baudRate); //应该是不需要floor
minAbsError = 100000;
for (jj = 0; jj <= 255; jj++)
{
maxAbsErrorInByte = 0;
count = 0;
for (ii = 0; ii <= 10; ii++)
{
count += NN + bitPosition(jj, 7 - (ii % 8));
//error = (ii + 1) * baudPeriod - count * clockPeriod;
error = (ii + 1) / (float)baudRate - count / (float)clockRate; //为了减少变量,改为此代码
if (error < 0)
error = -error;
if (error > maxAbsErrorInByte)
maxAbsErrorInByte = error;
}
if (maxAbsErrorInByte - minAbsError < -7.3e-12f) //这里就是“已知问题”
{
minAbsError = maxAbsErrorInByte;
uart_config->secondModReg = jj;
}
}
if (NN < 20)
{
uart_config->overSampling = 0;
uart_config->clockPrescalar = NN;
uart_config->firstModReg = 0;
}
else
{
uart_config->overSampling = 1;
uart_config->clockPrescalar = (uint16_t)((float)NN / 16.0f); //应该是不需要floor
uart_config->firstModReg = NN - (uart_config->clockPrescalar * 16);
}
//return minAbsError * baudRate * 100;
}
闪烁错误指示灯10次
//void uart_warning_led(void)
//{
// uint8_t ii;
// uint32_t jj;
// WARN_LED_INIT(WARN_LED_1_PORT, WARN_LED_1_PIN);
// WARN_LED_INIT(WARN_LED_2_PORT, WARN_LED_2_PIN);
// for (ii = 0; ii < 10; ii++)
// {
// WARN_LED_ON(WARN_LED_1_PORT, WARN_LED_1_PIN);
// WARN_LED_OFF(WARN_LED_2_PORT, WARN_LED_2_PIN);
// for (jj = 0; jj < 100000; jj++)
// ;
// WARN_LED_OFF(WARN_LED_1_PORT, WARN_LED_1_PIN);
// WARN_LED_ON(WARN_LED_2_PORT, WARN_LED_2_PIN);
// for (jj = 0; jj < 100000; jj++)
// ;
// }
//}
main.c
#include "driverlib.h"
/* Standard Includes */
#include <stdint.h>
#include <stdbool.h>
#include "sysinit.h"
#include "usart.h"
#include "baudrate_calculate.h"
int main(void)
{
SysInit(); //1.配置时钟
uart_init(115200); //包含了2.配置GPIO复用 3.初始化串口 4.开启串口模块
printf("MSP432\r\n");
printf("2021/8/24\r\n\r\n");
char c = '!';
char *s = "printf test";
int i = -12345;
unsigned u = 4321;
long int l = -123456780;
unsigned long n = 1098765432;
unsigned x = 0x89AB;
printf("Char %c\r\n", c);
printf("String %s\r\n", s);
printf("Integer %d\r\n", i);
printf("Unsigned %u\r\n", u);
printf("Long %d\r\n", l);
printf("Unsigned long %u\r\n", n);
printf("HEX %X\r\n", x);
while (1)
{
// 使用微库则可支持 scanf
// char a[100];
// scanf("%s", a);
// printf("%s\r\n", a);
}
}
注意:未知原因scanf用不了,勾选了微库也无法解决
五、定时器A中断
(一)MSP432P401R定时器A资源
MSP432P401R共有4个定时器A,每一个定时器A共有5个通道

Timer_A的特性包括
- 具有4种操作模式的异步16位定时/计数器;
- 可选择和可配置的时钟源;
- 最多达7个可配置的捕获/比较模块;
- 具有PWM 功能的可配置输出;
- 异步输入和输出锁存。
详见技术手册第783页
(二)计数模式
- 连续计数模式

从0开始计数,直到计数到216(65535),然后又从0计数,不断循环,可用于定时器捕获
- 增计数模式
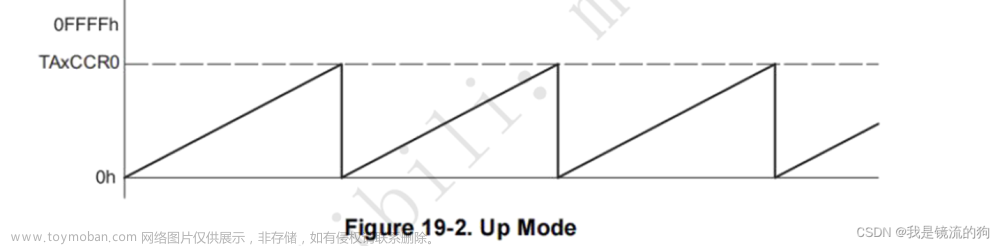
需要设置CCR0比较值寄存器0,CCR0确定定时器周期,可以将CCR0理解为STM32的ARR自动重装载值,定时器中断周期的计算公式也是通用的:Ttimer_a= C l k D i v × ( C C R 0 + 1 ) f c l k \quad {ClkDiv×(CCR0+1)\over f~clk~} f clk ClkDiv×(CCR0+1)【时钟分频乘以计数值(CCR0+1)的和除以时钟频率】
==ClkDiv ∈ [1, 8] ∪ {10, 12, 14, 16, 20, 24, 28, 32, 40, 48, 56, 64 };==这里与STM32不同,是固定的
- 增减计数模式
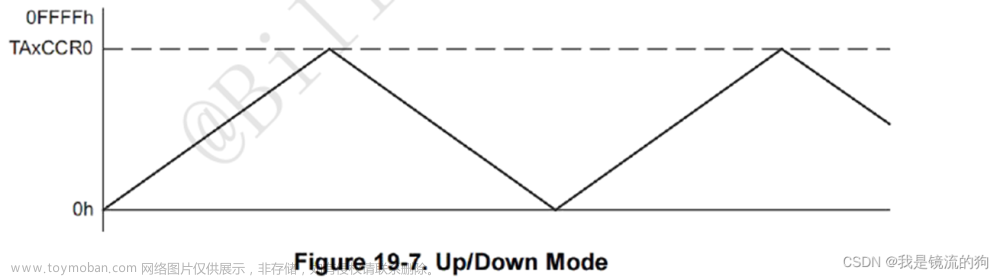
从0开始计数到CCR0递减为0
(三)库函数
1.初始化定时器模块
Timer_A_configureUpMode(TIMER_Ax_BASE, &upConfig);
2.选择模式开始计数
Timer_A_startCounter(TIMER_Ax_BASE, TIMER_A_UP_MODE);
3.清除比较中断标志位
Timer_A_clearCaptureCompareInterrupt(TIMER_Ax, REGISTER_0);
4.开启定时器A端口中断
Interrupt_enableInterrupt(INT_TAx_0);
5.开启总中断
Interrupt_enableMaster(void);
(四)定时器中断的一般配置
- 配置时钟
- 配置结构体
- 初始化定时器A
- 选择模式开始计数
- 清除比较中断标志位
- 开启定时器端口中断
- 开启总中断
- 编写TIMA ISR
(五)TIMER_A0定时0.5秒闪灯
timA.h
#ifndef __RNA_TIMA_H
#define __RNA_TIMA_H
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
void TimA0_Int_Init(uint16_t ccr0, uint16_t psc);
#endif
timA.c
#include "timA.h"
void TimA0_Int_Init(uint16_t ccr0, uint16_t psc)
{
// 1.增计数模式初始化
Timer_A_UpModeConfig upConfig;
upConfig.clockSource = TIMER_A_CLOCKSOURCE_SMCLK; //时钟源
upConfig.clockSourceDivider = psc; //时钟分频 范围1-64
upConfig.timerPeriod = ccr0; //自动重装载值(ARR)
upConfig.timerInterruptEnable_TAIE = TIMER_A_TAIE_INTERRUPT_DISABLE; //禁用 tim溢出中断
upConfig.captureCompareInterruptEnable_CCR0_CCIE = TIMER_A_CCIE_CCR0_INTERRUPT_ENABLE; //启用 ccr0更新中断
upConfig.timerClear = TIMER_A_DO_CLEAR; // Clear value
// 2.初始化定时器A
MAP_Timer_A_configureUpMode(TIMER_A0_BASE, &upConfig);
// 3.选择模式开始计数
MAP_Timer_A_startCounter(TIMER_A0_BASE, TIMER_A_UP_MODE);
// 4.清除比较中断标志位
MAP_Timer_A_clearCaptureCompareInterrupt(TIMER_A0_BASE, TIMER_A_CAPTURECOMPARE_REGISTER_0);
// 5.开启串口端口中断
MAP_Interrupt_enableInterrupt(INT_TA0_0);
}
// 6.编写TIMA ISR
void TA0_0_IRQHandler(void)
{
MAP_Timer_A_clearCaptureCompareInterrupt(TIMER_A0_BASE, TIMER_A_CAPTURECOMPARE_REGISTER_0);
/*开始填充用户代码*/
MAP_GPIO_toggleOutputOnPin(GPIO_PORT_P1, GPIO_PIN0);
/*结束填充用户代码*/
}
/*********************************************************************************************************/
main.c
#include "sysinit.h"
#include "usart.h"
#include "timA.h"
#include "usart.h"
#include "led.h"
#define CLKDIV 64 //时钟源分频
#define CCR0 37499 // 比较值0
/*
* 定时器中断周期:
*
* T_timer_a = CLKDIV * (CCR0 + 1) / f_clk
* = 64 * 37500 / 48000000
* = 0.05s = 20Hz
*/
int main(void)
{
SysInit(); // 第3讲 时钟配置
LED_Init(); // 第2讲 GPIO输出
TimA0_Int_Init(CCR0,CLKDIV); // 第8讲 TIMA中断
MAP_Interrupt_enableMaster(); // 开启总中断
while (1)
{
}
}
六、定时器A PWM模式
(一)计数模式
- 增计数模式

需要设置CCR0比较值寄存器0,CCR0确定定时器周期,可以将CCR0理解为STM32的ARR自动重装载值,定时器中断周期的计算公式也是通用的:Ttimer_a= C l k D i v × ( C C R 0 + 1 ) f c l k \quad {ClkDiv×(CCR0+1)\over f~clk~} f clk ClkDiv×(CCR0+1)【时钟分频乘以计数值(CCR0+1)的和除以时钟频率】
==ClkDiv ∈ [1, 8] ∪ {10, 12, 14, 16, 20, 24, 28, 32, 40, 48, 56, 64 };==这里与STM32不同,是固定的
- 增减计数模式
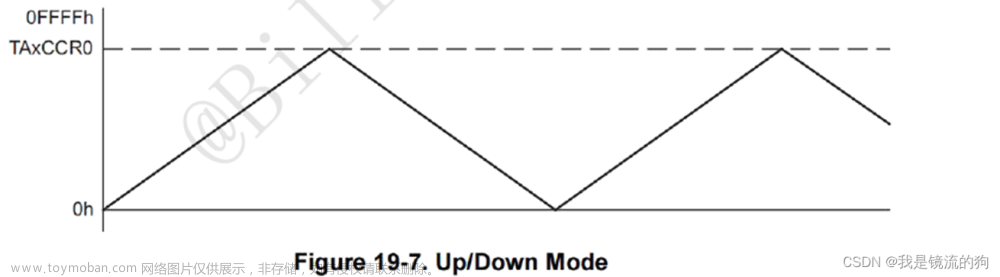
从0开始计数到CCR0递减为0
(二)输出模式

增计数模式 增减计数模式
定时器A有7种输出模式,但常用的只有两种
-
Output Mode 2:Toggle/Reset
当计时器计数到TAxCCRn值时,输出切换。当计时器计数到TAxCCR0值时,它被重置。
-
Output Mode 6:Toggle/Set
当计时器计数到TAxCCRn值时,输出切换。当计时器计数到TAxCCR0值时设置。
详见msp432p401r第791页
1.增计数模式:

定时器A从0计数到比较值1(CCR1)时,模式6输出高电平,之后比较值1计数到比较值0(CCR0)时,输出为低电平
比较值0是确定了整个定时器的周期
当选择输出模式2时,可以看到输出是相反的。
2.增减计数模式:

模式2和模式6配合后能生成带死区的互补PWM
一个定时器A能生成2路的带死区的互补PWM
(三)定时器A输出通道资源

带有PM是支持端口重映射的意思

(四)库函数
- 初始化定时器为PWM模式
Timer_A_generatePWM(TIMER_Ax_BASE, &TimAx_PWMConfig);
- 改变比较值(占空比/周期)
Timer_A_setCompareValue(TIMER_Ax, COMPARE_REGISTER_x, CCR);
(五)一般配置步骤
- 配置时钟
- 配置GPIO复用
- 配置结构体
- 初始化定时器
(六)PWM驱动舵机
timA.h
#ifndef __RNA_TIMA_H
#define __RNA_TIMA_H
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
void TimA1_PWM_Init(uint16_t ccr0, uint16_t psc);
#endif
timA.c
#include "timA.h"
void TimA1_PWM_Init(uint16_t ccr0, uint16_t psc)
{
/*初始化引脚*/
MAP_GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P7, GPIO_PIN7, GPIO_PRIMARY_MODULE_FUNCTION);
Timer_A_PWMConfig TimA1_PWMConfig;
/*定时器PWM初始化*/
TimA1_PWMConfig.clockSource = TIMER_A_CLOCKSOURCE_SMCLK; //时钟源
TimA1_PWMConfig.clockSourceDivider = psc; //时钟分频 范围1-64
TimA1_PWMConfig.timerPeriod = ccr0; //自动重装载值(ARR)
TimA1_PWMConfig.compareRegister = TIMER_A_CAPTURECOMPARE_REGISTER_1; //通道一 (引脚定义)
TimA1_PWMConfig.compareOutputMode = TIMER_A_OUTPUTMODE_TOGGLE_SET; //输出模式
TimA1_PWMConfig.dutyCycle = ccr0; //这里是改变占空比的地方 默认100%
MAP_Timer_A_generatePWM(TIMER_A1_BASE, &TimA1_PWMConfig); /* 初始化比较寄存器以产生 PWM1 */
}
main.c
#include "sysinit.h"
#include "usart.h"
#include "delay.h"
#include "timA.h"
/*
* 定时器PWM周期:
*`
* T_timer_a = CLKDIV * (CCR0 + 1) / f_clk
* = 48 * (19999 + 1) / 48000000
* = 0.02s = 50Hz
*/
#define CLKDIV 48 // 时钟源分频
#define CCR0 19999 // 比较值0
#define CCR1_MIN 499 // ( 499 + 1) / (19999 + 1) = 500 / 20000 = 2.5%
#define CCR1_MAX 2499 // (2499 + 1) / (19999 + 1) = 2500 / 20000 = 12.5%
int main(void)
{
bool dir = 1;
uint16_t i = CCR1_MIN;
SysInit(); //第3讲 时钟配置
delay_init(); //第4讲 滴答延时
TimA1_PWM_Init(CCR0, CLKDIV); //第8讲 定时器A PWM
while (1)
{
if (dir)
i++;
else
i--;
if (i == CCR1_MAX)
{
dir = 0;
delay_ms(50);
}
else if (i == CCR1_MIN)
{
dir = 1;
delay_ms(50);
}
MAP_Timer_A_setCompareValue(TIMER_A1_BASE, TIMER_A_CAPTURECOMPARE_REGISTER_1, i);
delay_us(600);
}
}
七、定时器32
(一)定时器32介绍
Timer32的主要特性包括:
- 两个独立的计数器,每个都可配置成32位递减或16位计数器;
- 每个计数器具有3种不同的定时器模式;
- 每个计数器都可独立产生中断,而且两个计数器可生成一个组合中断。
- 输入时钟可预分频为1、1/16或1/256;(MCLK)
中断向量:
- INT_T32_INT1(定时器32_0)
- INT_T32_INT2(定时器32_1)
- INT_T32_INTC (Combine 结合)
定时器时钟使能由分频单元产生,并使能由计数器创建的具有下列条件之一的定时时钟:
-
MCLK #define TIMER32_PRESCALER_1 0x00
-
由4位预分频产生的16分频MCLK #define TIMER32_PRESCALER_16 0x04
-
由总共8位预分频产生的256分频MCLK #define TIMER32_PRESCALER_256 0x08

详见技术手册第756、766页
(二)Timer32的计数模式
- 自由运行模式: 计数器在递减到0后,继续从最大值递减。这是默认模式。
- 周期定时器模式:需要设置ARR(自动重装载值),ARR确定定时器32的周期,然后计数器以恒定的间隔生成一个中断,在递减到0后重新加载原始值(ARR)。常用
- 单次定时器模式:计数器产生一次中断。当计数器达到零时,它会停止,直到被用户重新编程。
定时器周期计算:
Ttimer_a= C l k D i v × ( A R R + 1 ) f c l k \quad {ClkDiv×(ARR+1)\over f~clk~} f clk ClkDiv×(ARR+1)【时钟分频乘以计数值(CCR0+1)的和除以时钟频率】
ClkDiv ∈ {1, 16, 256 };
例 1s= 1 (不分频) × ( A R R + 1 ) 48000000 \quad {1(不分频)×(ARR+1)\over 48000000} 480000001(不分频)×(ARR+1)
得出ARR+1=48000000
(三)库函数
- 初始化定时器
MAP_Timer32_initModule(TIMER32_0_BASE, psc, TIMER32_32BIT, TIMER32_PERIODIC_MODE);
- 设置ARR重装载值
MAP_Timer32_setCount(TIMER32_0_BASE, aar);
- 配置定时器32开始连续计数 false
MAP_Timer32_startTimer(TIMER32_0_BASE, false); //连续计数模式 false
- 清除中断标志位
MAP_Timer32_clearInterruptFlag(TIMER32_0_BASE);
- 使能定时器32中断
MAP_Timer32_enableInterrupt(TIMER32_0_BASE);
- 开启定时器32端口中断
MAP_Interrupt_enableInterrupt(INT_T32_INT1);
(四)一般配置步骤
配置时钟
- 初始化为32位周期计数模式
- 设置ARR自动重装载值
- 清除中断标志位
- 使能定时器32中断
- 配置定时器32开始连续计数
- 开启定时器32端口中断
- 开启总中断
- 编写TIM32 ISR
(五)打印一个自增的数值
tim32.h
#ifndef __RNA_TIM32_H
#define __RNA_TIM32_H
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
void Tim32_0_Int_Init(uint32_t aar, uint8_t psc);
#endif
tim32.c
#include "tim32.h"
#include "usart.h"
void Tim32_0_Int_Init(uint32_t aar, uint8_t psc)
{
MAP_Timer32_initModule(TIMER32_0_BASE, psc, TIMER32_32BIT, TIMER32_PERIODIC_MODE);
MAP_Timer32_setCount(TIMER32_0_BASE, aar);
MAP_Timer32_enableInterrupt(TIMER32_0_BASE);
MAP_Timer32_startTimer(TIMER32_0_BASE, false); //连续计数模式 false
MAP_Interrupt_enableInterrupt(INT_T32_INT1);
}
/* Timer32 ISR */
void T32_INT1_IRQHandler(void)
{
MAP_Timer32_clearInterruptFlag(TIMER32_0_BASE);
/*开始填充用户代码*/
static uint8_t timer_second = 0;
//一般在频率较高的中断不常用 这个printf比较费时间 这里只是演示
printf("%d秒过去了\r\n\r\n", ++timer_second);
/*结束填充用户代码*/
}
main.c
#include "sysinit.h"
#include "usart.h"
#include "led.h"
#include "tim32.h"
/*
* 定时器中断周期:
*
* T_timer_32 = CLKDIV * (ARR + 1) / f_clk
* = 1 * 48000000 / 48000000
* = 1s = 1Hz
*/
#define CLKDIV TIMER32_PRESCALER_1 // 时钟源分频
#define ARR 47999999 // 自动重装载值
int main(void)
{
SysInit(); // 第3讲 时钟配置
uart_init(115200); // 第7讲 串口配置
Tim32_0_Int_Init(ARR, CLKDIV); // 第9讲 TIM32中断
printf("砸瓦鲁多\r\n\r\n");
MAP_Interrupt_enableMaster(); // 开启总中断
while (1)
{
}
}
八、GPIO复用
(一)库函数
- 配置GPIO模式:
GPIO_setAsPeripheralModuleFunctionInputPin(Port, Pin,mode);//复用输入
GPIO_setAsPeripheralModuleFunctionOutputPin(Port, Pin,mode);//复用输出
- mode参数有效值
GPIO_PRIMARY_MODULE_FUNCTION //主功能
GPIO_SECONDARY_MODULE_FUNCTION //第二功能
GPIO_TERTIARY_MODULE_FUNCTION //第三功能
功能详见msp432o401r第138页

看P1SEL1.x+P1SEL0.x:
- 0 1:主功能
- 1 0:第二功能
- 1 1:第三功能
P1DIR.x:方向寄存器
1为输出
0为输入
x表示无需关心。例:使用串口时GPIO的输入输出是由模块接管的,所以配置为复用输入或复用输出都可文章来源:https://www.toymoban.com/news/detail-635365.html
需要完整工程代码的点赞加关注,评论留下邮箱我发你文章来源地址https://www.toymoban.com/news/detail-635365.html
到了这里,关于MSP432速成教程(看这一篇就够了)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!