对于小型多关节机械臂的控制电路设计,选择合适的通信方式可以提高MCU与上位机之间的实时性。以下是一些在STM32上常用的通信方式,你可以根据你的具体需求选择适合的:
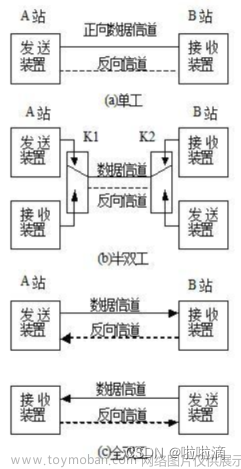
- 串口通信(UART):串口通信是一种常见的通信方式,支持全双工通信。它的优点是硬件实现较为简单,成本低,但传输速度相对较慢。在STM32上,可以通过串口与上位机进行数据传输。
- SPI(Serial Peripheral Interface):SPI是一种同步的串行通信协议,支持全双工通信。它的优点是传输速度相对较快,但需要额外的芯片来实现。在STM32上,可以通过SPI接口与上位机进行通信。
- I2C(Inter-Integrated Circuit):I2C是一种同步的双向通信协议,支持多设备连接。它的优点是传输速度相对较快,且硬件实现较为简单。在STM32上,可以通过I2C接口与上位机进行通信。
- USB(Universal Serial Bus):USB是一种通用的串行通信协议,支持全双工通信。它的优点是传输速度相对较快,且可以通过USB接口进行供电。在STM32上,可以使用USB接口与上位机进行通信,但需要额外的USB芯片来实现。
根据实际需求和机械臂的控制要求,你可以选择一种或多种通信方式来实现MCU与上位机之间的实时通信。同时,为了提高控制和反馈的实时性,你可以考虑使用STM32的实时操作系统(RTOS)来管理任务和中断处理,以实现更高效的实时控制。
 文章来源:https://www.toymoban.com/news/detail-636024.html
文章来源:https://www.toymoban.com/news/detail-636024.html
现在在评论区回复666拿下这份上位机入门到专家教程,该教程有基础知识、项目演练等各种资料。 马上行动!成为工控行业的精英!文章来源地址https://www.toymoban.com/news/detail-636024.html
到了这里,关于stm32与上位机电脑间最快的通信方式是什么?的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!