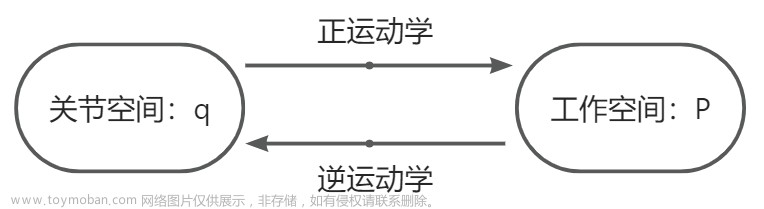
以六轴机械臂为例,设机械臂关节空间为q,位置矩阵为p,速度矩阵为v
q = [ q 0 , q 1 , q 2 , q 3 , q 4 , q 5 ] q=[q_0,q_1,q_2,q_3,q_4,q_5] q=[q0,q1,q2,q3,q4,q5]
p
=
[
x
,
y
,
z
]
T
=
[
f
x
(
q
)
f
y
(
q
)
f
z
(
q
)
]
p=[x,y,z]^T=\begin{bmatrix}f_x(q) \\ f_y(q)\\ f_z(q) \\ \end{bmatrix}
p=[x,y,z]T=
fx(q)fy(q)fz(q)
联立机械臂速度矩阵、关节空间和位置矩阵的关系如下
v = p ˙ = ( d f x d t d f y d t d f z d t ) = ( ∂ f x ∂ q 0 d q 0 d t ⋯ ∂ f x ∂ q 5 d q 5 d t ∂ f y ∂ q 0 d q 0 d t ⋯ ∂ f y ∂ q 5 d q 5 d t ∂ f z ∂ q 0 d q 0 d t ⋯ ∂ f z ∂ q 5 d q 5 d t ) = ( ∂ f x ∂ q 0 ⋯ ∂ f x ∂ q 5 ∂ f y ∂ q 0 ⋯ ∂ f y ∂ q 5 ∂ f z ∂ q 0 ⋯ ∂ f z ∂ q 5 ) ( q 1 ⋮ q 5 ) v=\dot p=\begin{pmatrix}\frac {df_x}{dt} \\ \frac {df_y}{dt} \\ \frac {df_z}{dt}\\ \end{pmatrix} =\begin{pmatrix}\frac {\partial f_x} {\partial q_0}\frac {dq_0} {dt}& \cdots & \frac {\partial f_x} {\partial q_5}\frac {dq_5} {dt} \\ \frac {\partial f_y} {\partial q_0} \frac {dq_0} {dt} &\cdots&\frac {\partial f_y} {\partial q_5} \frac {dq_5} {dt} \\\frac {\partial f_z} {\partial q_0} \frac {dq_0} {dt} &\cdots & \frac {\partial f_z} {\partial q_5} \frac {dq_5} {dt} \end{pmatrix}= \begin{pmatrix}\frac {\partial f_x} {\partial q_0}& \cdots & \frac {\partial f_x} {\partial q_5} \\ \frac {\partial f_y} {\partial q_0}& \cdots & \frac {\partial f_y} {\partial q_5} \\\frac {\partial f_z} {\partial q_0}& \cdots & \frac {\partial f_z} {\partial q_5} \end{pmatrix}\begin{pmatrix}q_1 \\ \vdots \\ q_5\\ \end{pmatrix} v=p˙= dtdfxdtdfydtdfz = ∂q0∂fxdtdq0∂q0∂fydtdq0∂q0∂fzdtdq0⋯⋯⋯∂q5∂fxdtdq5∂q5∂fydtdq5∂q5∂fzdtdq5 = ∂q0∂fx∂q0∂fy∂q0∂fz⋯⋯⋯∂q5∂fx∂q5∂fy∂q5∂fz q1⋮q5
将中间矩阵定义为雅克比矩阵J,则
J = ( ∂ f x ∂ q 0 ⋯ ∂ f x ∂ q 5 ∂ f y ∂ q 0 ⋯ ∂ f y ∂ q 5 ∂ f z ∂ q 0 ⋯ ∂ f z ∂ q 5 ) J=\begin{pmatrix}\frac {\partial f_x} {\partial q_0}& \cdots & \frac {\partial f_x} {\partial q_5} \\ \frac {\partial f_y} {\partial q_0}& \cdots & \frac {\partial f_y} {\partial q_5} \\\frac {\partial f_z} {\partial q_0}& \cdots & \frac {\partial f_z} {\partial q_5} \end{pmatrix} J= ∂q0∂fx∂q0∂fy∂q0∂fz⋯⋯⋯∂q5∂fx∂q5∂fy∂q5∂fz
v = J q ˙ v=J\dot q v=Jq˙
q ˙ = [ q ˙ 0 , q ˙ 1 , q ˙ 2 , q ˙ 3 , q ˙ 4 , q ˙ 5 ] \dot q=[\dot q_0,\dot q_1,\dot q_2,\dot q_3,\dot q_4,\dot q_5] q˙=[q˙0,q˙1,q˙2,q˙3,q˙4,q˙5]
那么雅克比矩阵J可以用来表示从关节速度空间q_dot到关节末端执行空间速度的映射,即一个末端的位置可以由多个关节空间的速度映射得到,即
q ˙ J ⟶ v \dot q {J \over \longrightarrow }v q˙⟶Jv
同样,末端执行空间速度F同样可以使用雅克比矩阵映射到关节空间力矩
τ J T ⟶ F \tau {J ^T \over \longrightarrow}F τ⟶JTF
τ = J T F \tau = J^TF τ=JTF文章来源:https://www.toymoban.com/news/detail-637132.html
例如7轴机械臂,具有冗余的一个关节空间(7x1)q_6,所以在末端执行空间的变换矩阵(6x1)(3x3旋转+3x1平移)进行映射的时候q_6无论处在什么位置,都不会影响末端执行空间的位置和速度,称为零空间文章来源地址https://www.toymoban.com/news/detail-637132.html
到了这里,关于雅克比矩阵在机器人运动学中的应用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!