1. 陀螺仪
1.1 什么是陀螺仪?
检测角度变化的一个装置。
1.1.1 有什么用??
用于检测角度变化,用角度变化的值判断物体的运动轨迹。
1.1.2 我们怎么用?
我们是使用这个装置(或者说设备)获取到数据,再使用这个数据得到我们想要的信息。
这里我使用陀螺仪获取板子的运动轨迹(其实是陀螺仪的运动轨迹)。
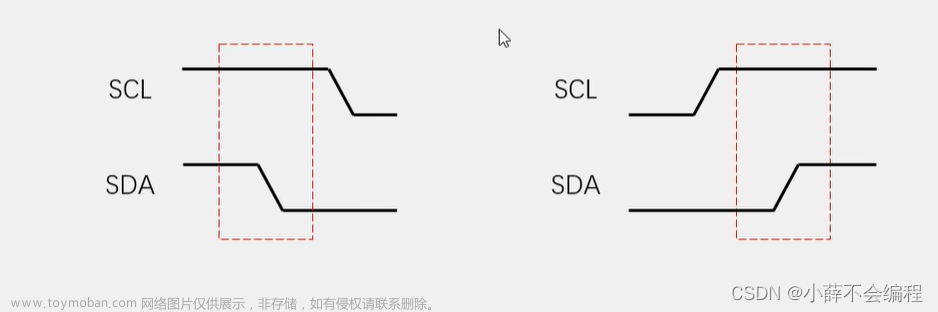
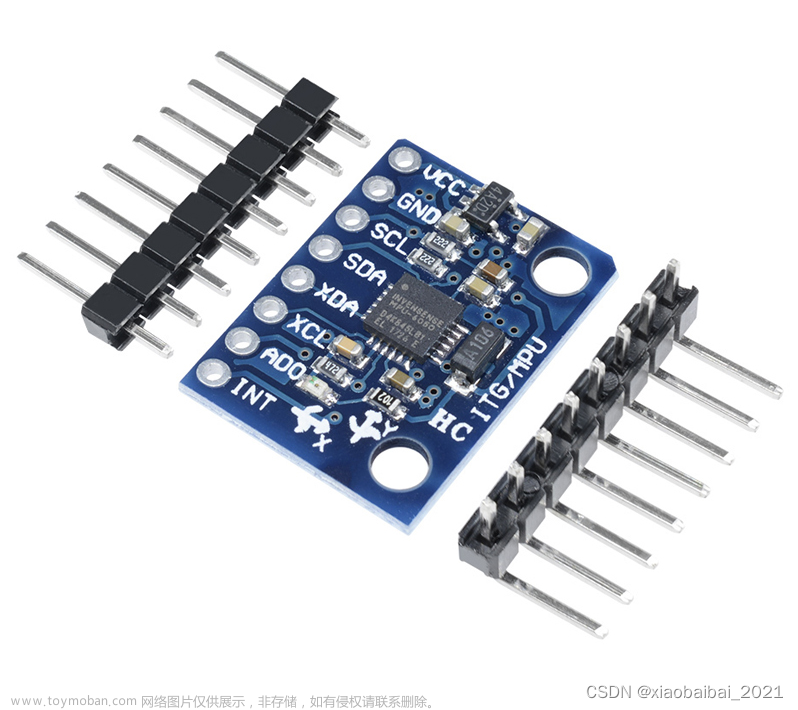
1.1.4 看原理图

又又又使用的是IIC通信协议,而且引脚又是PB6和PB7。
1.1.5 地址是多少??

结合原理图可以知道地址是0x68。
1.1.6 陀螺仪如何工作?
陀螺仪在你设置好参数之后,就会根据你设置的参数获取数据,数据存储在对应的寄存器中,你可以通过对应寄存器读取到想要的数据。
1.1.7 参数怎么设置?
源码m:
mpu6050.c文章来源:https://www.toymoban.com/news/detail-638301.html
#include "mpu6050.h"
#include "systick.h"
#include "usart1.h"
/*********************************************************************************************************
* 函 数 名 : Mpu6050_Init
* 功能说明 : 初始化MPU6050
* 形 参 : 无
* 返 回 值 : 0:成功;其他:错误代码
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_Init(void)
{
unsigned char res;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_6 | GPIO_Pin_7);
Mpu6050_WriteByte(MPU_PWR_MGMT1_REG, 0X80); //复位MPU6050
delay_ms(500);
delay_ms(500);
Mpu6050_WriteByte(MPU_PWR_MGMT1_REG, 0X00); //唤醒MPU6050
Mpu6050_SetGyroFsr(3); //陀螺仪传感器,±2000dps
Mpu6050_SetAccelFsr(0); //加速度传感器,±2g
Mpu6050_SetRate(50); //设置采样率50Hz
Mpu6050_WriteByte(MPU_INT_EN_REG, 0X00); //关闭所有中断
Mpu6050_WriteByte(MPU_USER_CTRL_REG, 0X00); //I2C主模式关闭
Mpu6050_WriteByte(MPU_FIFO_EN_REG, 0X00); //关闭FIFO
Mpu6050_WriteByte(MPU_INTBP_CFG_REG, 0X80); //INT引脚低电平有效
res = Mpu6050_ReadByte(MPU_DEVICE_ID_REG);
if(res == MPU_ADDR){ //器件ID正确
Mpu6050_WriteByte(MPU_PWR_MGMT1_REG, 0X01); //设置CLKSEL,PLL X轴为参考
Mpu6050_WriteByte(MPU_PWR_MGMT2_REG, 0X00); //加速度与陀螺仪都工作
Mpu6050_SetRate(50); //设置采样率为50Hz
}else{
return 1;
}
return 0;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_SetGyroFsr
* 功能说明 : 设置MPU6050陀螺仪传感器满量程范围
* 形 参 : fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_SetGyroFsr(unsigned char fsr)
{
return Mpu6050_WriteByte(MPU_GYRO_CFG_REG, fsr<<3); //设置陀螺仪满量程范围
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_SetAccelFsr
* 功能说明 : 设置MPU6050加速度传感器满量程范围
* 形 参 : fsr:0,±2g;1,±4g;2,±8g;3,±16g
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_SetAccelFsr(unsigned char fsr)
{
return Mpu6050_WriteByte(MPU_ACCEL_CFG_REG, fsr<<3); //设置加速度传感器满量程范围
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_SetLPF
* 功能说明 : 设置MPU6050的数字低通滤波器
* 形 参 : lpf:数字低通滤波频率(Hz)
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_SetLPF(unsigned short lpf)
{
unsigned char data = 0;
if(lpf >= 188){
data = 1;
}else if(lpf >= 98){
data = 2;
}else if(lpf >= 42){
data = 3;
}else if(lpf >= 20){
data = 4;
}else if(lpf >= 10){
data = 5;
}else{
data = 6;
}
return Mpu6050_WriteByte(MPU_CFG_REG, data); //设置数字低通滤波器
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_SetRate
* 功能说明 : 设置MPU6050的采样率(假定Fs=1KHz)
* 形 参 : rat:4~1000(Hz)
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_SetRate(unsigned short rate)
{
unsigned char data;
if(rate > 1000){
rate = 1000;
}
if(rate < 4){
rate = 4;
}
data = 1000/rate - 1;
data = Mpu6050_WriteByte(MPU_SAMPLE_RATE_REG, data); //设置数字低通滤波器
return Mpu6050_SetLPF(rate/2); //自动设置LPF为采样率的一半
}
/*********************************************************************************************************
* 函 数 名 : usart1_report_imu
* 功能说明 : 通过串口一上报姿态数据
* 形 参 : roll:横滚角;pitch:俯仰角;yaw:航向角;
* 返 回 值 : 无
* 备 注 : 此函数上报至匿名上位机(v7),传入的角度数据应扩大100倍
*********************************************************************************************************/
void usart1_report_imu(short roll, short pitch, short yaw)
{
unsigned char tbuf[20] = {0};
unsigned char cnt = 0, i = 0;
unsigned char sumcheck = 0;
unsigned char addcheck = 0;
tbuf[cnt++] = 0xaa; //帧头
tbuf[cnt++] = 0xff; //目标地址
tbuf[cnt++] = 0x03; //功能码,0x03:飞控姿态,欧拉角模式
tbuf[cnt++] = 0x07; //数据长度固定7个
tbuf[cnt++] = BYTE0(roll);
tbuf[cnt++] = BYTE1(roll);
tbuf[cnt++] = BYTE0(pitch);
tbuf[cnt++] = BYTE1(pitch);
tbuf[cnt++] = BYTE0(yaw);
tbuf[cnt++] = BYTE1(yaw);
tbuf[cnt++] = 255; //融合状态
for(i=0; i<(tbuf[3]+4); i++){
sumcheck += tbuf[i]; //从帧头开始,对每一字节进行求和,直到DATA区结束
addcheck += sumcheck; //每一字节的求和操作,进行一次sumcheck的累加
}
tbuf[cnt++] = sumcheck; //和校验
tbuf[cnt++] = addcheck; //附加校验
Usart1_SendPackage(tbuf, cnt);
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_GetTemperature
* 功能说明 : 读取MPU6050温度值
* 形 参 : 无
* 返 回 值 : 温度值(扩大了100倍)
* 备 注 : 无
*********************************************************************************************************/
short Mpu6050_GetTemperature(void)
{
unsigned char buf[2];
short raw;
float temp;
Mpu6050_ReadLen(MPU_ADDR, MPU_TEMP_OUTH_REG, 2, buf);
raw = ((unsigned short)buf[0]<<8) | buf[1];
temp = 36.53 + ((double)raw)/340;
return temp * 100;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_GetGyroscope
* 功能说明 : 读取MPU6050陀螺仪值(原始值)
* 形 参 : gx、gy、gz:陀螺仪x、y、z轴的原始读数(带符号)
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_GetGyroscope(short *gx, short *gy, short *gz)
{
unsigned char buf[6], res;
res = Mpu6050_ReadLen(MPU_ADDR, MPU_GYRO_XOUTH_REG, 6, buf);
if(res == 0){
*gx = ((unsigned short)buf[0]<<8) | buf[1];
*gy = ((unsigned short)buf[2]<<8) | buf[3];
*gz = ((unsigned short)buf[4]<<8) | buf[5];
}
return res;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_GetAccelerometer
* 功能说明 : 读取MPU6050加速度值(原始值)
* 形 参 : ax、ay、az:加速度计x、y、z轴的原始读数(带符号)
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_GetAccelerometer(short *ax,short *ay,short *az)
{
unsigned char buf[6], res;
res = Mpu6050_ReadLen(MPU_ADDR,MPU_ACCEL_XOUTH_REG, 6, buf);
if(res == 0){
*ax = ((unsigned short)buf[0]<<8) | buf[1];
*ay = ((unsigned short)buf[2]<<8) | buf[3];
*az = ((unsigned short)buf[4]<<8) | buf[5];
}
return res;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_WriteLen
* 功能说明 : IIC连续写
* 形 参 : addr:器件地址;reg:寄存器地址;len:写入长度;buf:数据区;
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_WriteLen(unsigned char addr, unsigned char reg, unsigned char len, unsigned char *buf)
{
unsigned char i;
IIC_Start();
IIC_WriteByte((addr<<1) | 0); //发送器件地址+写命令
if(IIC_Wait_ACK()){ //等待应答
IIC_Stop();
return 1;
}
IIC_WriteByte(reg); //写寄存器地址
IIC_Wait_ACK(); //等待应答
for(i=0; i<len; i++){
IIC_WriteByte(buf[i]); //发送数据
if(IIC_Wait_ACK()){ //等待ACK
IIC_Stop();
return 1;
}
}
IIC_Stop();
return 0;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_ReadLen
* 功能说明 : IIC连续读
* 形 参 : addr:器件地址;reg:寄存器地址;len:写入长度;buf:数据区;
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_ReadLen(unsigned char addr, unsigned char reg, unsigned char len, unsigned char *buf)
{
IIC_Start();
IIC_WriteByte((addr<<1) | 0); //发送器件地址+写命令
if(IIC_Wait_ACK()){ //等待应答
IIC_Stop();
return 1;
}
IIC_WriteByte(reg); //写寄存器地址
IIC_Wait_ACK(); //等待应答
IIC_Start();
IIC_WriteByte((addr<<1) | 1); //发送器件地址+读命令
IIC_Wait_ACK(); //等待应答
while(len){
if(len==1){
*buf=IIC_ReadByte(1); //读数据,发送nACK
}else{
*buf=IIC_ReadByte(0); //读数据,发送ACK
}
len--;
buf++;
}
IIC_Stop(); //产生一个停止条件
return 0;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_WriteByte
* 功能说明 : IIC写一个字节
* 形 参 : reg:寄存器地址;data:写入的数据;
* 返 回 值 : 0:成功;其他:失败
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_WriteByte(unsigned char reg,unsigned char data)
{
IIC_Start();
IIC_WriteByte((MPU_ADDR<<1) | 0); //发送器件地址+写命令
if(IIC_Wait_ACK()){ //等待应答
IIC_Stop();
return 1;
}
IIC_WriteByte(reg); //写寄存器地址
IIC_Wait_ACK(); //等待应答
IIC_WriteByte(data); //发送数据
if(IIC_Wait_ACK()){ //等待ACK
IIC_Stop();
return 1;
}
IIC_Stop();
return 0;
}
/*********************************************************************************************************
* 函 数 名 : Mpu6050_ReadByte
* 功能说明 : IIC读一个字节
* 形 参 : reg:寄存器地址
* 返 回 值 : 读到的数据
* 备 注 : 无
*********************************************************************************************************/
unsigned char Mpu6050_ReadByte(unsigned char reg)
{
unsigned char res;
IIC_Start();
IIC_WriteByte((MPU_ADDR<<1) | 0); //发送器件地址+写命令
IIC_Wait_ACK(); //等待应答
IIC_WriteByte(reg); //写寄存器地址
IIC_Wait_ACK(); //等待应答
IIC_Start();
IIC_WriteByte((MPU_ADDR<<1) | 1); //发送器件地址+读命令
IIC_Wait_ACK(); //等待应答
res=IIC_ReadByte(1); //读取数据,发送nACK
IIC_Stop(); //产生一个停止条件
return res;
}
mpu6050.h文章来源地址https://www.toymoban.com/news/detail-638301.html
#ifndef __MPU6050_H
#define __MPU6050_H
#include "iic.h"
//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68
unsigned char Mpu6050_Init(void);
unsigned char Mpu6050_WriteLen(unsigned char addr, unsigned char reg, unsigned char len, unsigned char *buf); //IIC连续写
unsigned char Mpu6050_ReadLen(unsigned char addr, unsigned char reg, unsigned char len, unsigned char *buf); //IIC连续读
unsigned char Mpu6050_WriteByte(unsigned char reg, unsigned char data); //IIC写一个字节
unsigned char Mpu6050_ReadByte(unsigned char reg); //IIC读一个字节
unsigned char Mpu6050_SetGyroFsr(unsigned char fsr);
unsigned char Mpu6050_SetAccelFsr(unsigned char fsr);
unsigned char Mpu6050_SetLPF(unsigned short lpf);
unsigned char Mpu6050_SetRate(unsigned short rate);
unsigned char Mpu6050_SetFifo(unsigned char sens);
short Mpu6050_GetTemperature(void);
unsigned char Mpu6050_GetGyroscope(short *gx, short *gy, short *gz);
unsigned char Mpu6050_GetAccelerometer(short *ax, short *ay, short *az);
void usart1_report_imu(short roll, short pitch, short yaw);
#endif
到了这里,关于陀螺仪MPU6050(IIC&源码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!